(.54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ
1
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматического вождения мобильных сельскохозяйственных машинно-тракторных агрегатов при выполнении механизированных работ, и может быть применено для автоматизации выполнения поворотов колесными тракторами в агрегате с прицепными, полунавесными и навесными сельскохозяйственными машинами.
Известно устройство для автоматического вождения тракторных агрегатов, включающее исполнительный механизм, усилитель мощности и программный блок, выполненный в виде профилированного диска с узлом слежения за формой образующей/ приводящегося в движение посредством шагового двигателя с импульсным датчиком скорости 1 .
Недостатком известного устройства является то, что его нельзя испоЯьз.овать для автсжатизации вождения трактора в агрегате с навесной машиной, а также на сельскохозяйственных работах, где для обеспечения выполнения технологических требований обязательно использование независимого вёша отбора мощности трактора. ТРАКТОРА
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому является устройство для управления движением трактора, содержащее программный блок, переключатель режимов функционирования, схему ориентации с датчиком курсового угла, задатчики поворотов, переключатель программ, блок питания, форми10рователь управляющего сигнала, датчик интенсивности управляющего воздействия с блоком задатчиков и исполнительный механизм 2.
Недостатком этого устройства явля15ется то, что во время его эксплуатации требуются большие затраты времени на ввод программы или замену ее другой, а в процессе автоматического вождения происходит накопление схлибок
20 (отклонений фактической траектории от расчетной) .
Цель изобретения - повышение точности вождения трактора.
Эта цель достигается тем, что
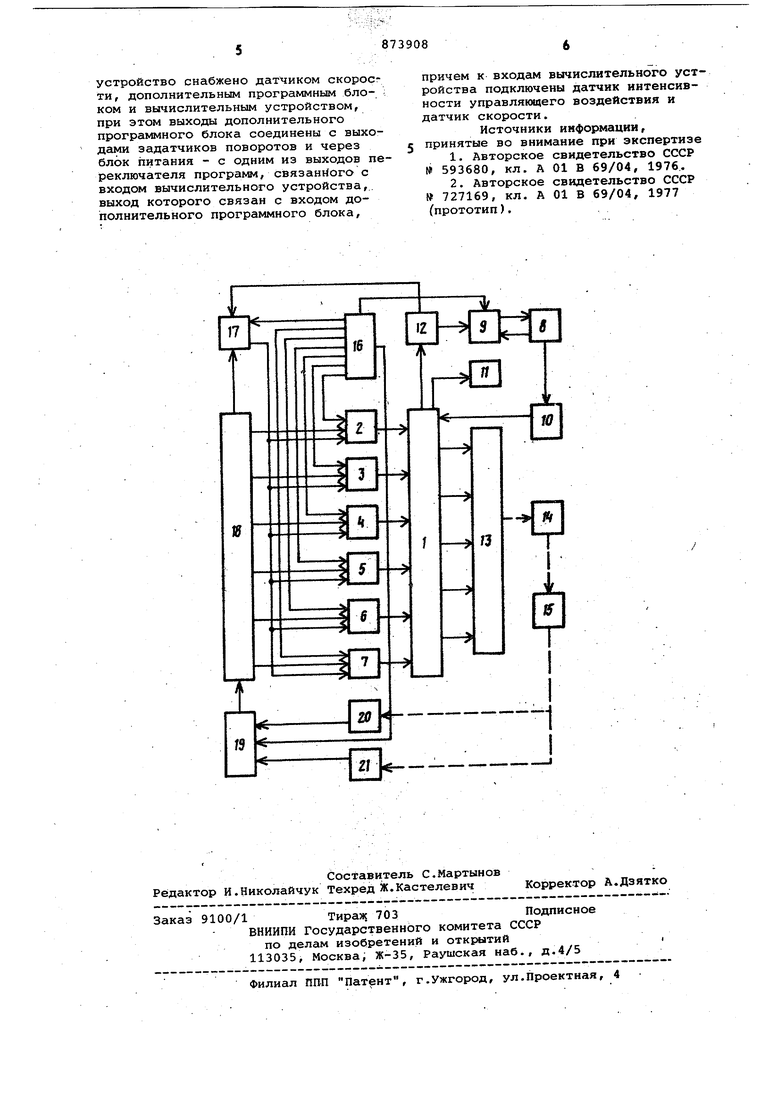
25 устройство снабжено датчике скорости дополнительным программным блоком и вычислительньш устройством, при этом выходы дополнительного программного блока соединены с входами за30 -датчиков поворотов и черезблок питаия - с одним из выходов переключатея программ, связанного с входом выислительного устройства, выход коорого связан с входом дополнительноо программного блока, причем к вхоам вычислительного устройства подлючены датчик интенсивности управля щего воздействия и датчик скорости. На чертеже изображена блок-схема предлагаемого устройства.
Устройство содержит программный блок 1, СОСТОЯ1ДИЙ из гибридных микросхем, входы которых соединены с задатчиками 2-7 поворотов, выполненными в виде логических элементов, имеющих возможность регулировки лительности прохождения управляющих сигналов. Датчик 8 курсового угла, представляющий собой гидроагрегат с механизмом корректировки и двумя потенциометрическими выходами, взаимосвязан со схемой 9 ориентации, выполненной в виде транзисторного моста, а вторым выходом связан с формирователем 10 управляющего сигнала, соединенного с программным блоком 1. К выходу программного блока 1 подключены звуковой сигнализатор 11, выполненный в виде транзисторного генератора звуковой частоты, переключатель 12 режимов функционирования и блок 13 задатчиков интенсивности управляющего воздействия, имеющий гидравлическую связь с трактором. Блок 13 задатчиков интенсивности управляющего воздействия соединен с исполнительным механизмом 14, который имеет механическую связь с трактором 15, К входам задатчиков 2-7 поворотов подключены переключатель 16 программ, блок 17 питания, являющийся управляемым стабилизатором напряжения, который связан с дополнительным программным блоком 18 .и переключателем 12 режимов функционирования . .
Вход дополнительного программного блока 18 соединен с вычислительным устройством 19, входда которого соединены с переключателем 16 программ, датчиком 20 интенсивности управляющего воздействия и датчиком 21 скорости. Оба датчика выполнены .индукционнгдаи и имеют механическую связь с трактором 15.
Устройство работает следукицим образом. -
переключателем 16 программ устанавливается необходимая ширина и вид поворота. Это приводит к автоматической настройке каждого из задатчиков 2-7 поворотов.
Трактор 15 начинает двигаться на соответствующей программе передаче. При пересечении задними колесами контрольной линии поворотной полосы водитель нажимает на кнопку переключателя 12 режимов функционирования. Устройство включается в режим
автоматического управления. Управляющий сигнал проходит через задатчики 2-7 поворотов и программный блок 1, поступаетна соответствующий вход блока 13 задатчиков интенсивности 5 управляющего воздействия и через электрический сигнал преобразуется в гидравлический.
Исполнительный механизм 14 управляет поворотом трактора 15. За реаQ лизацией заданных режимов движения постоянно следят датчик 20 интенсивности управляющего возпействия и датчик 21 скорости. Вычислительное устройство 19, включенное переключателем 16 программ в соответствующий
программе режим, сравнивает текущие значения интенслвности управляющего воздействия с заданными, получая информацию от датчиков 20 и 21 и, в случае наличия рассогласования, вычисляет поправки и через дополнитель,ный программный блок 18 корректирует регулировки задатчиков 2-7 пово-. ротов блока 17 питания.При.выполнении беспетлевого поворота с прямолинейным участком включается датчик 8 курсового угла. На гоне трактор работает в режиме ориентации относительно направления рабочего гона. Схема 9 ориентации
0 управляет механизмом корректировки гидроагрегата датчика 8 курса, чтобы сопротивление на выходе оставалось неизменным. При включении режима автоматического управления на поворот-
с ной полосе датчик 8 работает в режиме измерен-ия курсового угла,
В момент, когда выполнение программы закончится, программный блок 1 переключает переключатель 12 режимов функционирования в режим ручного управления и одновременно включает звуковой сигнализатор 11, извещая водителя о передаче ему управления,
5 Если на тракторе водителя нет, и предлагаемое устройство работает совместно с системой управления на рабочем гоне, в момент окончания отработки программы управление передаQ ется последней.
Формула изобретения
Устройство для управления движением трактора, содержащее программный блок, переключатель режимов функционирования, схему ориентации с датчиком курсового угла, задатчики поворотов, переключатель программ, блок
питания, формирователь управлянвдего сигнала, датчик интенсивности управляющего воздействия с блоком задатчиков и исполнительный механизм, отличающееся тем, что, с
целью повышения точности вождения.
устройство снабжено датчиком скоросг ти, дополнительным программным бло- ком и вычислительным устройством, при этом выходы дополнительного программного блока соединены с выходами задатчиков поворотов и через блок питания - с одним из выходов переключателя программ, связанного с входом вычислительного устройства, выход которого связан с входом дополнительного программного блока.
причем к входам вычислительного устройства подключены датчик интенсивности управляющего воздействия и датчик скорости.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 593680, кл. А 01 В 69/04, 1976.
2.Авторское свидетельство СССР № 727169, кл. А 01 В 69/04, 1977 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Устройство для автоматизированного поворота тракторного агрегата | 1979 |
|
SU988212A1 |
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Устройство для автоматического поворота тракторного агрегата | 1977 |
|
SU727169A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
