1
(21)4635636/08
(22)10.01.89
(46)15.11.91.Бюл. №42
(72) И.В.Войцещук и Ю.Н.Никонов
(53)621-229.72(088.8)
(56) Авторское свидетельство СССР
№876414, кл. В 25 F 1/06, 1981.
(54) МЕХАНИЗМ РУКИ МАНИПУЛЯТОРА (57) Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов. Цель изобретения - повышение надежности работы механизма руки манипулятора. Качание тяг, шарнирио установленных на фланце, осуществляется
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКАТНАЯ ГОЛОВКА | 1995 |
|
RU2076786C1 |
| Вакуумный манипулятор | 1990 |
|
SU1754442A1 |
| СОЕДИНИТЕЛЬНАЯ МУФТА ТРУБОПРОВОДОВ С ПРИВОДОМ | 2024 |
|
RU2832372C1 |
| Предохранительное устройство | 1987 |
|
SU1433618A1 |
| Прибор для измерения кривизны буровых скважин | 1975 |
|
SU699164A1 |
| Манипулятор | 1980 |
|
SU869931A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1985 |
|
SU1301529A2 |
| Устройство для тренировки пловцов | 1988 |
|
SU1523154A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |

ГР
Ч,I 71
3UJ Г1
15
посредством привода. Тяги шарнирно связаны с фланцем, па котором закреплена кисть с эаьвачом. Каждая тяга выполнено в виде полою корпуса Э, Б котором расположен подвижный шгок. 10 с муфгой 11. На корпусе 9 сммгпфопан концзвой аыключз- таль 20, нзхчим: ой зяеменч 21 которою про
Мзоорзтетае cnnocHiCfi к ашйносгш- ению и мо.чссм бигь использовано в конструкциях манипулятора и.
Цель изобретения поьыыешде надежности работы ..ia руки макмпулято- ра.
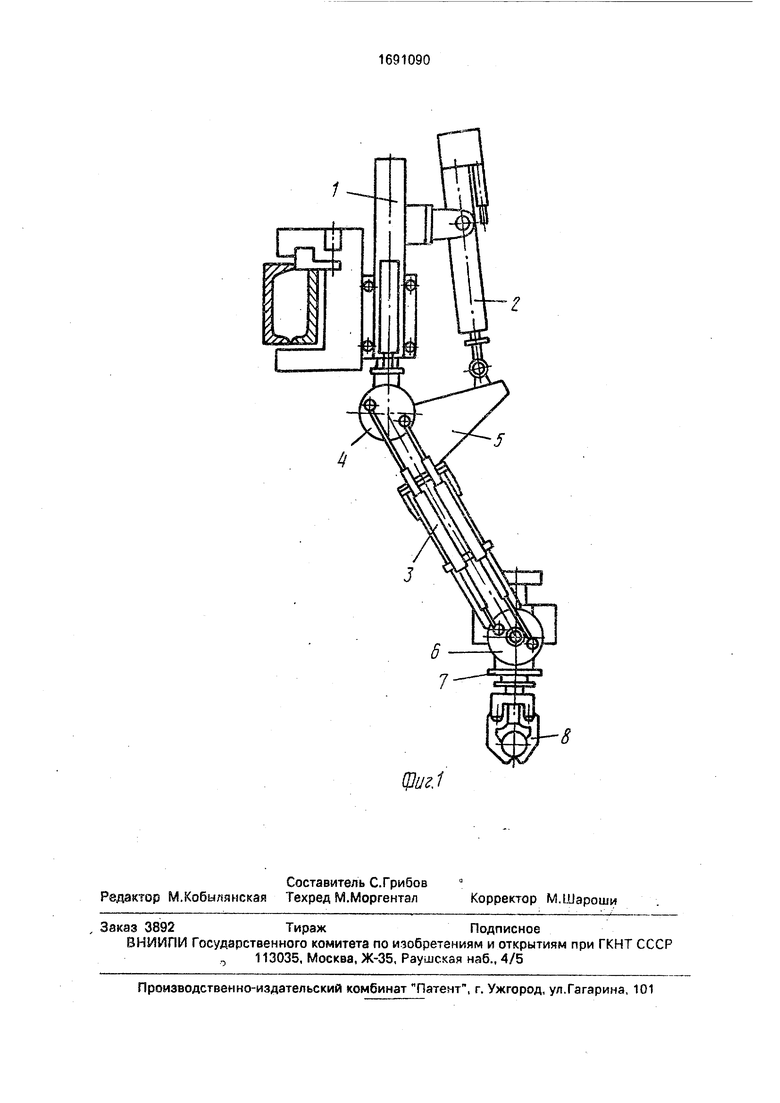
На фиг, 1 изоБргля .еп механизм руки манипулятора, общий аил; из фиг. 2 - продольный разрез тяги.
Механизм pyscft установлен на ползуне 1 манипулятора. Привод 2 осуществляет качание тяг 3, шйрнирно установленных на фланце 4, посредством рычага 5. Фланец А жестко закреплен на ползуне 1. Тяги 3 шар- нирно связаны с вторым фланцем 6, на котором закрзппена кисть 7 с захватом 8.
Каждая ггго исполнена в виде полого корпуса 9, и кот.::пс-м пэсположен подвижный шток 10 с зс:- рдг|пенной не нем муфтой 11. Пружина 12 уотзповлече между упорными шайбами 13 л 14 : счт ом состоянии. Гайка 15 удерх кБзет ес:о конструкцию в сборе. В резьбовую муфту 1I и корпус 9 ввернуты проушины 1о и 17, зафиксированные соответственно гайками 13 и 1Э. На корпусе 9 смонтирован концевой выключатель 20, на- :химнс / элемент 21 которого пропущен :е- рез паз я корпусе 9 и входит в конусну;о канавку, выполненную на головке штока ,, Выключатель 20 гложет быть переустоиог тен на корпусе 9,
Механизм рухи мзнмпулятор работч.-: следующим образом.
В исходном положении пружина 12 r.pw- «имает язайбу 13 , выполненному на внутренней поверхности корпуса, а шайбу 14 - к торцу гайки 15. При этом торец головки шток совпадает с. уровнем упомянутого вь отупз,а торец гайки 15 -с уровнем торца резьбовой муфты 11. Усилие предва- рительно сжзтой пружины 12 выбирают большим, чем усилие, необходимое лпп удержания руки манипулятора в вертикальном положении, при Этом учитывается таг- sec детали.
Привод 2 поворачивает рычэг 5 руки относительно оси. неподвижно устзновлен
пущен черед паз & корпусе 9 и РЧОДИТ в конусную канавку, выполненную в головке шгока 10, В процессе работы исключена деформация и обрыв тяг, Дополнительная упругость механизма позволяет захватывать деталь при ошибке позиционирования манипулятора. 2 ил.
15
0
0
5 0
5
5
ной ча ползуне I, на задонный угол, Гяги 3 поворачиваются на шарнирах относительно фланца 4 i-i пирсмещнюг фланец 6, обеспечивая нартикальное положение кисти 7. При ззармйяом столкновении с гфепятствием ; ис гь 7 знесте с захватом 8 сгарается повернуться в сторону, прогиоеположную препятствию. Прм этом фланец 6 поворачивается умеете с кистью 7, растягивая одну из тяг 3 и сокращая другую до момента срабатывания выключателя 20, который в свою оче- рзд, отключает привод качания. При снятии нагрузки на кисть тяги 3 возвращают ее в вертикальное положение.
8 случае воздействия на тягу растягивающего усилия головка штока, воздействуя на шайбу 13, сжимает пружину до срабатывания выключателя 20,
В случае воздействия на тягу сжимающего усилия резьбовая муфта 11, воздействуя на шайбу 14, сжимает пружину 12 до срабатывания выключателя 20,
После снятия воздействия пружина 12 возвращает конструкцию в исходное положение.
Изобретение позволяет исключить деформацию и обрыв тлг, а также придает механизму дополнительную упругость, что позволяет захватывать деталь при ошибке позиционирования манипулятора.
Формула изобретения Механизм руки манипулятора, содержащий два фланца, шарнирно соединенных между собой двумя параллельно располо- женными тягами, связанными с, приводом качания, о т л и ч а ю щ i/. и с я тем, что, с целью повышения надежности работы, каждая тяга выполнена з виде голого корпуса, в котором установлен двустороннз подпружиненный в осевом направлении относительно корпуса шток, имеющий возможность взаимодействия с концевым выключателем, установленным на корпусе тяги, при этом корпус каждом тяги шарнирно связан с, одним фланцем, а шток шарнирно связан с другим фланцем.
г
7
