Изобретение относится к измерительной технике и может быть использовано в бортовых и наземных информационно-измерительных системах для эксплуатации и испытания летательных аппаратов и их силовых установок.
Цель изобретения - повышение точности оценки измеряемой физической величины за счет подстройки коэффициентов весового усреднения.
Достигаемый в данном способе комплексного измерения физической величины и устройстве для его реализации положительный эффект обосновывается следующим образом.
При измерении физической величины однородными или построенными на различных физических принципах датчиками их выходные электрические сигналы после масштабирования, приводящего сигналы к одному/уровню, равны
xi(t)-x(t)+ni(t).
0
5
деленными только текущими значениями погрешностей измерения ni(t).
Далее согласно предлагаемому способу получают из разностных сигналов ei(t) оценки погрешности измерения для каждого датчика ni(t). Записывают систему линейных алгебраических уравнений (4) в матричном виде.
А-п-ё,(5)
где ё {e;(t)} и п {ni(t)} - N - мерные вектор-столбцы;
А - квадратная матрица размерностью NxN, полностью определяемой системой
(4).
Например, для N 3
(б)
(7)


| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексное измерительное устройство с самоконтролем | 1988 |
|
SU1608618A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 1994 |
|
RU2082099C1 |
| Комплексное устройство контроля параметров | 1988 |
|
SU1520482A1 |
| Информационно-измерительная система для определения компонент перемещений и деформаций объекта | 1989 |
|
SU1693361A1 |
| ПОЛЯРИМЕТР | 1990 |
|
RU2007694C1 |
| СТАТИСТИЧЕСКИЙ АНАЛИЗАТОР КАЧЕСТВА ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1993 |
|
RU2096788C1 |
| Система автоматической стабилизации плотности пульпы в сливе классификатора при мокром процессе измельчения | 1984 |
|
SU1260022A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU998526A1 |
| Устройство автоматического управления процессом магнитной сепарации | 1983 |
|
SU1331562A1 |
| Информационно-измерительная система для определения компонент перемещений и деформаций объекта | 1990 |
|
SU1783283A1 |
Изобретение относится к измерительной технике и может быть использовано в информационно-измерительных системах Мель изобретения - повышение точности оценки измеряемой физической величины за счет подстройки коэффициентов весового усреднения. Устройство содержит три датчика сигналов 1-3, три блока вычитания 4-6, двенадцать блоков умножения 7- 15, 33-35. три источника опорного сигнала 16-18, пять блоков сложения 19-21, 32,36, три кадратора 22-24, шесть блоков деления 25-27. Принцип действия устройства основан на вычислении разностных величин выходных сигналов и послед/ющего вычисления коэффициентов усреднения по следующей формуле, приведенной в описании. Выходным сигналом устройства является произведение сигнала датчика сигналов на соответствующий коэффициент. 1 ил. ел с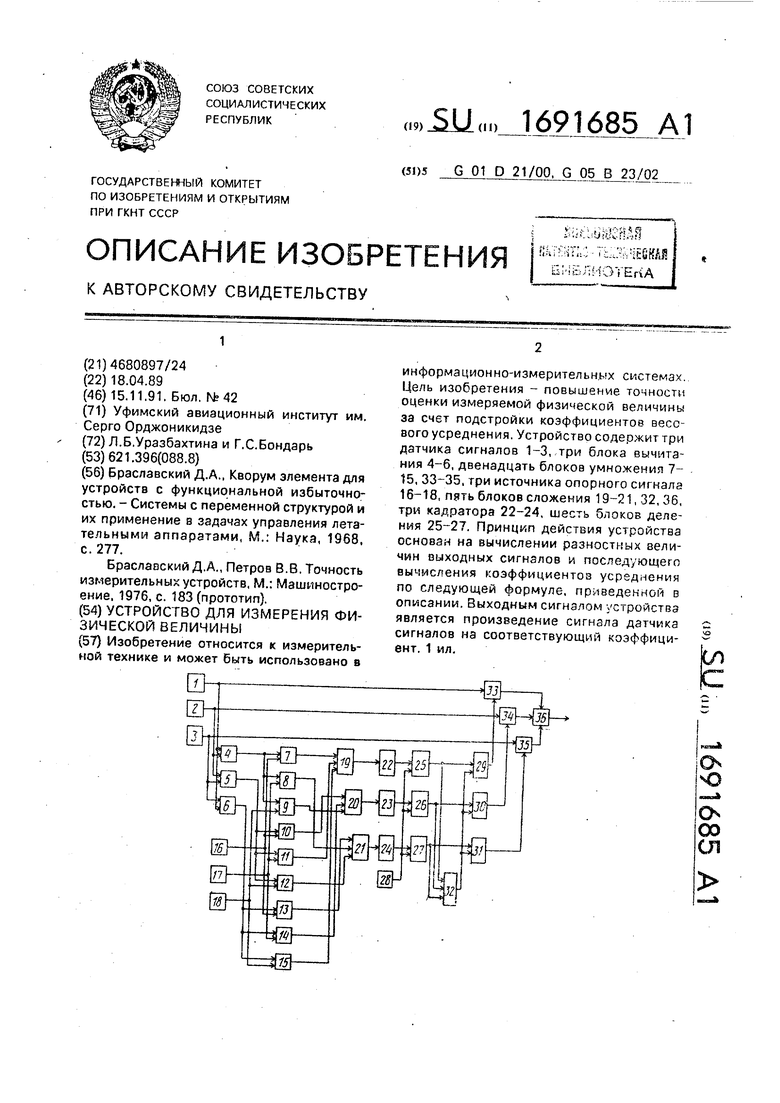
x(t)-x(t)i + ni(t),
(1)
x(t) x(t) + пы(г),
где x(t) - сигнал, отражающий истинное значение измеряемой физической величины;
xi(t) - выходной электрический сигнал 1-го датчика.
m(t) - случайная погрешность измерения 1-го датчика, некоррелированная с погрешностями других датчиков;
N - число комплексируемых датчиков.
Разностные сигналы ei(t) образуются вычитанием из выходного электрического сигнала 1-го датчика xi(t) выходного электрического сигнала датчика xj(t), причем I У J и пары I, j не должны повторяться. Общее количество образованных разностей равно N
ei(t)-xi(t)-xj(t)-m(t)-nj(t).(2)
Конкретный вид уравнения (2) определяется выбором пар I. j и может быть, например, следующим
ei(t)xi(t)-x2(t)
(3)
(4)
LeN(t)nN(t)-xi(t) Разностные сигналы ei(t) не содержат составляющих полезного сигнала X(t) и являются наблюдаемыми величинами, опре5
0
5
5
0
Система (4) является вырожденной, так как определитель системы равен нулю, detA .
Таким образом, задача получения оценок ni(t) из системы (4) является некорректной и классическими методами не решается. Для получения оценок ni(t) в данном примере используют метод решения подобных некорректных задач, предложенный М.М.Лаврентьевым, - замена операторного уравнения A-Pi e близким ему 9
(А+а-Е)
(8)
где а Q-чмсловой параметр;
Е - единичная матрица;
h {m(t)}N -N - мерный вектор-столбец оценок погрешностей ni(t).
Решение операторного уравнения (8)
|Ц-(А+а- Е) 1. ё(9)
при соответствующем выборе параметра (по результатам предварительного моделирования или же как предложено в 9 на стр. 50). принимается за приближенное решение системы (4). Система (4) тогда заменяется на следующую систему
ei(t) (1 +a)ni(t)-n(t)
ei(t)-(1 + a)fii(t)-ni+i(t)
(10)
ем(т) (1 + a)nN(t)- ni(t), которая уже не является вырожденной. Ее однозначное решение существует и может быть получено любым аналитическим или вычислительным методом
m(t) - F(ei(t), e2(t)eN(t), a); 1N. (11)
Например, для N 3 имеют
Г
1
t) + e2 +
3-1 3-1/ -1 5
(12)
fy
(t ) 62 + ез + --- ei
т тb° T
/Г - 1/Г - 1/Г 1
10
(t)-#-63+- -61+- -62 /г3-1/г3- /r-1
15 (14)
1 +a
(14) (15)
Определенные таким образом точечные оценки погрешностей датчиков m(t) пред- лагается использовать для настройки параметров линейных безынерционных преобразователей, осуществляющих преобразование электрических сигналов датчиков с целью получения оптимальной оценки X(t) измеряемой физической величины X(t)., Зависимости оптимальных параметров линейных безынерционных преобразователей от оценок rtj(t) должны быть получены заранее, например, из условия минимума математического ожидания квадрата погрешности оценки измеряемой величины
M(x(t)-x(t)),(16)
где М - операция математического ожидания,;
X(t) - оценка измеряемой физической величины (t), определяемая как
fr)-Јl
x(t) 2U(x,(t)). I 1
LI - операция преобразования 1-го линейного безынерционного преобразователя электрического сигнала 1-го датчика.
Способ комплексного измерения физической величины будет эффективным, если позволит получить среднеквадратическую погрешность оценки измеряемой величины меньшую, чем среднеквадратическая погрешность измерения самого точного из комплексируемых датчиков.
В случае, если линейные безынерционные преобразователи представляют собой усилители с управляемым коэффициентом усиления , то произведенный синтез оптимальных по критерию (16) параметров таких линейных безынерционных преобразователей при дополнительном условии обеспечения инвариантности погрешности оценивания измеряемой величины по
отношению к ее истинному значению дает следующие результаты 3, 5
х х 1(18)
i 1
1
Ь
rf
(19)
10
Ј10
15
20 2530
35
где средний квадрат погрешности измерения i-ro датчика, который может быть вычислен по оценкам ni(t)
(О(И ,
Т
(20)
где Т - текущее время измерения.
Определяя оценки погрешностей ni(t). формируя с их использованием (см. формулу 20) электрические сигналы управления, про
порциональные с , воздействуют на линейные безынерционные преобразооатели с целью изменения их коэффициентов усиления (см. формулу 19).
Определенные по критерию (16) значения At обеспечивают оптимальность оценки измеряемой фезической величины на всем интервале измерения, т.е. оптимальность в среднем, что однако не гарантирует оптимальность оценки x(t) в каждый момент времени. ,Д,ля обеспечения оптимальности оценки X(t) Б каждый момент времени необходимо при настройке AI от средних, статистических характеристик погрешностей от перейти к мгновенным оценкам погрешностей m(t). Тогда Л принимают вид
40
1
„ 1
(21)
(t)
Таким образом, условие (16) позволяет определить оптимальные параметры линейного безынерционного преобразователя сигнала 1-го датчика. Следует отметить, что эти параметры не зависят от истинного измеряемого сигнала, а полностью определяются погрешностями измерения датчиков.
Линейные безынерционные преобразователи могут осуществлять и другое преоб- разование электрических сигналов
Xi(t) - nj(t)
датчиков, например, м
На чертеже изображена блок-схема устройства.
Устройство содержит первый, второй, третий датчики 1-3 сигналов, первый, второй и третий блоки 4-6 вычитания, первый, второй и третий блоки 7-9 умножения, четвертый, пятый и шестой блоки 10-12 умножения, седьмой, восьмой и девятый блоки 13-15 умножения, первый источник 16 постоянного опорного сигнала, второй источник 17 постоянного опорного сигнала, источник 18 постоянного опорного сигнала, первый блок 19 сложения, второй блок 20 сложения, третий блок 21 сложения, первый, второй и третий квадраторы 22-24, первый, второй и третий блоки 25-27 деления, четвертый источник 28 постоянного опорного сигнала, четвертый, пятый и шестой блоки 29-31 деления, четвертый блок 32 сложения, десятый, одиннадцатый и двенадцатый блоки 33-35 умножения, пятый блок 36 сложения.
Выходные сигналы делителей 16-18 должны быть численно равны
JЈ
, и-.
1
соответственно. ff - 1 1 - 1 ft - 1 Полученное по результатам проведенного на микроЭВМ моделирования значение параметра (см. формулу 15) равно 1, 01... 1, 1. При этом обеспечивается устойчивое оценивание погрешности измерения датчиков. Тогда при// 1,1 величина выходного сигнала равна:
для источника 16 постоянного опорного сигнала 3,655;
для источника 17 постоянного опорного сигнала 3,323;
для источника 18 постоянного опорного сигнала 3,021.
Таким образом, величины выходных сигналов источников 16-18 постоянных опорных сигналов являются вполне определенными, конкретными и неменяющимися Б процессе работы числами, рассчитанными заранее. Выходной сигнал источника 28 постоянного опорного сигнала численно равен единице.
Устройство работает следующим образом.
Выходные сигналы датчиков 1, 2, 3, равные XL X2, Хз соответствен но, поступают на входы блоков 4-6 вычитания, так что на выходе блоков 4-6 вычитания разностные сигналы каждой пары датчиков ei, 62, ез
ei - Xi - Х2
е2 - Х2 - Хз(22)
ез-Хз-Xi.
Блоками 7-15 умножения осуществляются умножения выходных сигналов ei, ез, ез блоков 4-6 вычитания на выходные сигналы 31, 32. аз источников 16-18 постоянно0
5
0
5
0
5
0
5
0
5
го.опорного сигнала таким образом, что на выходе блоков 7-9 умножения, на первые входы которых поступает выходной сигнал блока 4 вычитания, а на вторые входы - выходные сигналы источников 16-18 постоянного опорного сигнала соответственно, имеют сигналы Zi, Z2, Zs соответственно, равные
Zi ai-en 72 3261; Zs аз-ei; (23) на выходе блоков 10-12 умножения на первые входы которых поступает выходной сигнал блока 5 вычитания, а на вторые входы - выходные сигналы источников 16-18 постоянного опорного сигнала соответственно, имеют сигналы ZA, Zs, Ze соответственно, равные
Z4 ai 62; Zs Э2 в2; Ze аз 62; (24) на выходе блоков 13-15 умножения, на первые входы которых поступает выходной сигнал блока 6 вычитания, а на вторые входы - выходные сигналы источников 16-18 постоянного опорного сигнала соответственно, имеют сигналы Zy. Ze, Zg соответственно, равные
Z7 ai-ез: Zs 32 ез: Zg аз-ез. (25)
Сигналы Zi, Zs. Zsi блоков 7, 11, 15 умножения соответственно суммируются в блоке 19 сложения, выходной сигнал которого гц равен с учетом (23), (24), (25) ni Zi + Zs + Zg avei + 32-62 + аз-ез. (26)
Сигналы 2л, Ze, Zs блоков 10, 14, 9 умножения соответственно суммируются в блоке
20сложения, выходной сигнал которого равен с учетом (23), (24), (25)
ri2 Z4 + Z8 + Z3 ai-62+ 32-ез + аз-е1. (27) Сигналы 7.1, 2.2, Ze блоков 13, 8, 12 умножения соответственно суммируются в блоке
21сложения, выходной сигнал которого равен с учетом (23). (24), (25)
лз Z + Z2 + Ze eves + 32-61 + аз-еа. (28) Таким образом, на выходе блоков 19-21 сложения имеют (см, формулу 12, 13, 14) точечные оценки погрешностей гм, fo, пз датчиков 1-3 соответственно.
Выходные сигналы щ, П2, пз блоков 19- 21 сложения возводятся) в квадрат квадраторами 22-24 соответственно и поступают на первые входы блоков 25-27 деления, соответственно, на вторые входы которых приходит сигнал с источника 28 постоянного опорного сигнала, численно равный единице. Поэтому выходные сигналы блоков
25-27 деления равны -7- , - , - .
П1 П2 П2
соответственно. В блоках 29-31 деления выходные сигналы блоков 25-27 деления делятся на их сумму, получаемую с выхода блока 32 сложения. Выходные сигналы
Ai , h., Аз блоков 29, 30, 21 деления соответственно будут равны
1
Л2
гп
л2 2/Ч2
ГП П2 ПЗ
и
л 2 2А9
П1П2ПЗ
(29)
Аз
1 пЗ
П1П2ПЗ
Таким образом, по выходным сигналам ni, П2, пз блоков 19-21 умножения определяются коэффициенты весового усреднения, численно равные Ач.Аг.Аз , с помощью квадраторов 22-24, блоков 25-31 деления, источника 28 постоянного опорного сигнала и блока 32 сложения. Вычисленные сигналы AI , Аз , Аз поступают на входы блоков 33-35 умножения соответственно, на вторые входы которых приходят сигналы XL X2, Хз датчиков 1-3 соответственно. Выходные сигналы блоков 33-35 умножения, которые равны произведениям выходного сигнала датчика на соответствующий сигнал А) , суммируются в блоке 36 сложения, на выходе которого имеют сигнал X, равный
х - Аг xi +Аг х2+Аз хз
(30)
Выходной сигнал X блока 36 сложения является выходным сигналом всего устройства. Таким образом, показана возможность реализации способа. Необходимо Отметить, что данный способ может быть реализован различными методами в зависимости от количества датчиков, структуры линейных безынерционных преобразователей, степени априорной информации о погрешностях измерения отдельных датчиков и т.д.
Формула и з обретения Устройство для измерения физической величины, содержащее первый, второй и третий датчики сигналов и первый блок сложения, отличающееся тем, что, с целью повышения точности оценки измеряемой физической величины за счет подстройки коэффициентов весового усреднения, в устройство введены с первого по двенадцатый блоки умножения, с первого по четвертый источники постоянного опорного сигнала, с 5 второго по пятый блоки сложения, с первого по третий квадраторы, с первого по шестой блоки деления и с первого по третий блоки вычитания, входы уменьшаемого которых соединены с выходами с первого по третий
0 датчиков сигналов соответственно, входы вычитаемого с первого по третий блоков вычитания соединены с выходами второго, третьего и первого датчиков сигналов соответственно, выход первого блока вычитания
5 - с входами первых сомножителей с первого по третий блоков умножения, выход второго блока вычитания - с входами первых сомножителей с четвертого по шестой блоков умножения, выход третьего блока вычитания 0 с входами первых сомножителей с седьмого по девятый блоков умножения, входы вторых сомножителей первого, четвертого и седьмого блоков умножения соединены с выходом первого источника постоянного
5 опорного сигнала, входы вторых сомножи- телей второго, пятого и восьмого блоков умножения - с выходом второго источника постоянного опорного сигнала, входы вторых сомножителей третьего, шестого и де0 вятого блоков умножения - с выходом третьего источника постоянного опорного сигнала, выходы первого, пятого и девятого блоков умножения подключены соответственно к входам первого-третьего слагаемых
5 второго блока сложения, выходы третьего, четвертого и восьмого блоков умножения - соответственно к входам первого-третьего слагаемых третьего блока сложения, выходы второго, шестого и седьмого блоков ум0 ножения - соответственно к входам первого-третьего слагаемых четвертого блока сложения, выходы второго, третьего и четвертого блоков сложения соединены с входами первого, второго и третьего квадра5 торов соответственно, выходы которых сое- динены с входами делителя первого, второго и третьего блоков деления соответственно, входы делимого которых связаны.с выходом четвертого источника постоянного
0 опорного сигнала, выходы первого, второго и третьего блоков деления соединены с входами делимого четвертого, пятого и шестого блоков деления соответственно, входы делителя которых связаны с выходом пятого
5 блока сложения, первый, второй и третий входы которого подключены к выходам первого, второго и третьего блоков деления соответственно, выходы четвертого, пятого и шестого блоков деления соединены с входами первых сомножителей десятого, один11169168512
надцзтого и двенадцатого блоков умноже-надцатого и двенадцатого блоков умножения соответственно, входы вторых сомно-ния соединены соответственно с входами жителей которых связаны с выходамипервого-третьего слагаемых первого блока первого, второго и третьего датчиков сигна-сложения, выход которого является выхо- лов соответственно, выходы десятого, один-5 дом устройства.
| Браслзвский Д.А., Кворум элемента для устройств с функциональной избыточностью | |||
| - Системы с переменной структурой и их применение в задачах управления летательными аппаратами, М.: Наука, 1968, с | |||
| ПАРОПЕРЕГРЕВАТЕЛЬ ДЛЯ ЛОКОМОБИЛЬНЫХ КОТЛОВ | 1912 |
|
SU277A1 |
| Браславский ДА, Петров В.В | |||
| Точность измерительных устройств, М,: Машиностроение | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Переносная мусоросжигательная печь-снеготаялка | 1920 |
|
SU183A1 |
