1
(21)4761991/24 (22)05.10.89 (46)15.11.91. Бюл. №42
(71)Научно-производственное объединение по технологии механосборочного производства и специального оборудования
(72)В.Д.Константинов, А.Б.Авербах, И.С.Ло- латухин и В.Н.Белофастов (53)621.327(088.8)
(56)Патент США
№4307791. кл. 180/168, опублик. 1981.
Авторское свидетельство СССР № 305442, кл. G 05 D 1/12, 1969. (54) СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ
(57)Изобретение относится к автоматике и может быть использовано для управления робокаром, движущимся по светоотражающей полосе в гибкой производственной системе. Цель - повышение точности. Система управления оснащена излучателем 2, фотоприемником 4 и установленными симметрично относительно продольной оси светоотражающей полосы двумя идентичными жидкокристаллическими индикаторами 5 и 6, работающими на просвет и связанными с генератором 9 прямоугольных импульсов. Система снабжена также усилителем 12, передающим сигналы от фотоприемника 4 к аналоговым ключам 10 и 11, от которых через блоки усреднения 13 и 14 сигналы, пропорциональные величине светового потока, проходящего через соответствующий жидкокристаллический индикатор, -поступают в сумматор 15, где после вычитания вырабатывается сигнал, подаваемый на привод 16 рулевого управления транспортного средства. 2 ил.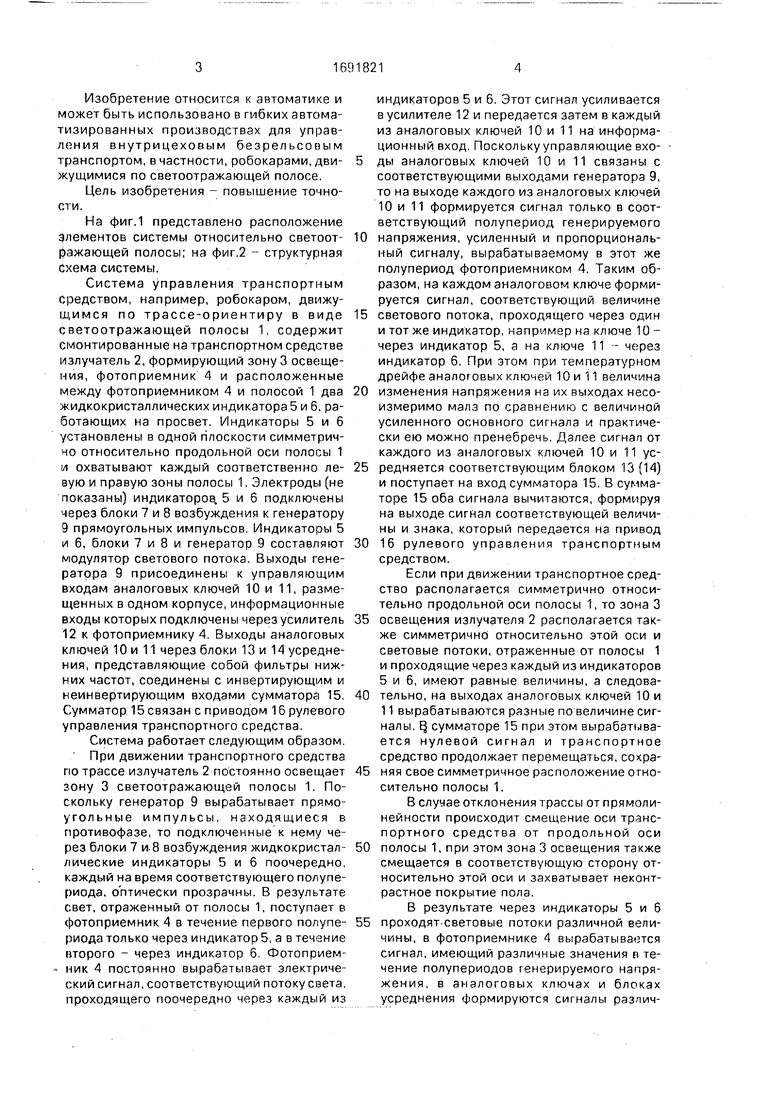
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1991 |
|
RU2042169C1 |
| Система управления транспортным средством | 1984 |
|
SU1242919A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2003 |
|
RU2249841C1 |
| ИМИТАТОР ВИДИМОСТИ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 1991 |
|
RU2056646C1 |
| Устройство для управления движением дорожно-строительной машины | 1990 |
|
SU1749336A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2279118C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2263021C1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 1992 |
|
RU2027195C1 |
О
ю
со
ю
Фаг. J
Изобретение относится к автоматике и может быть использовано в гибких автоматизированных производствах для управления внутрицеховым безрельсовым транспортом,в частности, робокарами,движущимися по светоотражающей полосе.
Цель изобретения - повышение точности,
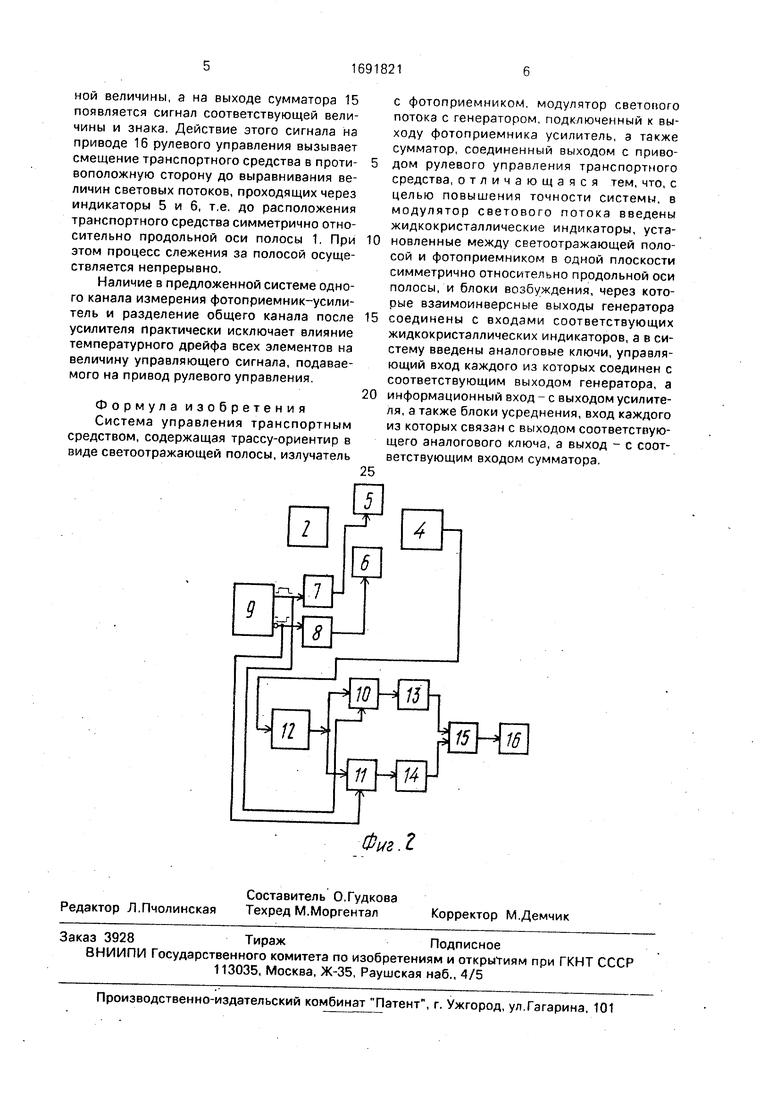
На фиг.1 представлено расположение элементов системы относительно светоотражающей полосы; на фиг.2 - структурная схема системы.
Система управления транспортным средством, например, робокаром, движущимся по трассе-ориентиру в виде светоотражающей полосы 1, содержит смонтированные на транспортном средстве излучатель 2, формирующий зону 3 освещения, фотоприемник 4 и расположенные между фотоприемником 4 и полосой 1 два жидкокристаллических индикатора 5 и 6, работающих на просвет. Индикаторы 5 и 6 установлены в одной плоскости симметрично относительно продольной оси полосы 1 и охватывают каждый соответственно левую и правую зоны полосы 1. Электроды (не показаны) индикаторов, 5 и 6 подключены через блоки 7 и 8 возбуждения к генератору 9 прямоугольных импульсов. Индикаторы 5 и 6, блоки 7 и 8 и генератор 9 составляют модулятор светового потока. Выходы генератора 9 присоединены к управляющим входам аналоговых ключей 10 и 11, размещенных в одном корпусе, информационные входы которых подключены через усилитель 12 к фотоприемнику 4. Выходы аналоговых ключей 10 и 11 через блоки 13 и 14 усреднения, представляющие собой фильтры нижних частот, соединены с инвертирующим и неинвертирующим входами сумматора 15. Сумматор 15 связан с приводом 16 рулевого управления транспортного средства.
Система работает следующим образом. При движении транспортного средства по трассе излучатель 2 постоянно освещает зону 3 светоотражающей полосы 1. Поскольку генератор 9 вырабатывает прямоугольные импульсы, находящиеся в противофазе, то подключенные к нему через блоки 7 и 8 возбуждения жидкокристаллические индикаторы 5 и 6 поочередно, каждый на время соответствующего полупериода, оптически прозрачны. В результате свет, отраженный от полосы 1, поступает в фотоприемник 4 в течение первого полупериода только через индикатор 5, а в течение второго - через индикатор 6 Фотоприем- ник 4 постоянно вырабатывает электрический сигнал, соответствующий потоку света, проходящего поочередно через каждый из
индикаторов 5 и 6. Этот сигнал усиливается в усилителе 12 и передается затем в каждый из аналоговых ключей 10 и 11 на информационный вход. Поскольку управляющие вхо- ды аналоговых ключей 10 и 11 связаны с соответствующими выходами генератора 9, то на выходе каждого из аналоговых ключей
10и 11 формируется сигнал только в соответствующий полупериод генерируемого
0 напряжения, усиленный и пропорциональный сигналу, вырабатываемому в этот же полупериод фотоприемником 4. Таким образом, на каждом аналоговом ключе формируется сигнал, соответствующий величине
5 светового потока, проходящего через один и тот же индикатор, например на ключе 10 - через индикатор 5, а на ключе 11 - через индикатор б. При этом при температурном дрейфе аналоговых ключей 10 и 11 величина
0 изменения напряжения на их выходах несоизмеримо мала по сравнению с величиной усиленного основного сигнала и практически ею можно пренебречь. Далее сигнал от каждого из аналоговых ключей 10 и 11 ус5 редняется соответствующим блоком 13 (14) и поступает на вход сумматора 15. В сумматоре 15 оба сигнала вычитаются, формируя на выходе сигнал соответствующей величины и знака, который передается на привод
0 16 рулевого управления транспортным средством.
Если при движении транспортное средство располагается симметрично относительно продольной оси полосы 1, то зона 3
5 освещения излучателя 2 располагается также симметрично относительно этой оси и световые потоки, отраженные от полосы 1 и проходящие через каждый из индикаторов 5 и 6, имеют равные величины, а следова0 тельно, на выходах аналоговых ключей 10 и
11вырабатываются разные по величине сигналы. EJ сумматоре 15 при этом вырабатывается нулевой сигнал и транспортное средство продолжает перемещаться, сохра5 няя свое симметричное расположение относительно полосы 1.
В случае отклонения трассы от прямолинейности происходит смещение оси транспортного средства от продольной оси
0 полосы 1, при этом зона 3 освещения также смещается в соответствующую сторону относительно этой оси и захватывает неконтрастное покрытие пола.
В результате через индикаторы 5 и 6
5 проходят световые потоки различной величины, в фотоприемнике 4 вырабатывается сигнал, имеющий различные значения п течение полупериодов генерируемого напряжения, в аналоговых ключах и блоках усреднения формируются сигналы различной величины, а на выходе сумматора 15 появляется сигнал соответствующей величины и знака. Действие этого сигнала на приводе 16 рулевого управления вызывает смещение транспортного средства в противоположную сторону до выравнивания величин световых потоков, проходящих через индикаторы 5 и 6, т.е. до расположения транспортного средства симметрично относительно продольной оси полосы 1. При этом процесс слежения за полосой осуществляется непрерывно.
Наличие в предложенной системе одного канала измерения фотоприемник-усилитель и разделение общего канала после усилителя практически исключает влияние температурного дрейфа всех элементов на величину управляющего сигнала, подаваемого на привод рулевого управления.
Формула изобретения Система управления транспортным средством, содержащая трассу-ориентир в виде светоотражающей полосы, излучатель
0
5
0
5
с фотоприемником, модулятор светогюго потока с генератором, подключенный к выходу фотоприемника усилитель, а также сумматор, соединенный выходом с приводом рулевого управления транспортного средства, отличающаяся тем, что, с целью повышения точности системы, в модулятор светового потока введены жидкокристаллические индикаторы, установленные между светоотражающей полосой и фотоприемником в одной плоскости симметрично относительно продольной оси полосы, и блоки возбуждения, через которые взаимоинверсные выходы генератора соединены с входами соответствующих жидкокристаллических индикаторов, а в систему введены аналоговые ключи, управляющий вход каждого из которых соединен с соответствующим выходом генератора, а информационный вход - с выходом усилителя, а также блоки усреднения, вход каждого из которых связан с выходом соответствующего аналогового ключа, а выход - с соответствующим входом сумматора,
