1
(21)4698247/09
(22)31.05.89
(46) 23.11.91. Бюл. IP 43
(71)Пензенский политехнический институт
(72)Б.В.Султанов, С.Л.Шутов, Л.Н.Афанасьев и В.Б„Дорошкевич
(53)621.396.662 (088.8)
(56) Авторское свидетельство СССР № 1568240, кл. Н 03 L 7/00, 1987.
(54)УСТРОЙСТВО ВОССТАНОВЛЕНИЯ НЕСУЩЕГО КОЛЕБАНИЯ СИГНАЛА ДАННЫХ
(57} Изобретение относится к технике электросвязи и может быть использовано в высокоскоростной аппаратуре передачи данных. Цель изобретения - повышение точности при обработке од-
нополосного сигнала данных. Введение в устройство, содержащее синфазный и квадратурный демодуляторы 1 и 4, управляемый генератор 2, фазовращатель на 90° 3, квадраторы 7 и 8, первый блок деления 10, сумматор 1., блок извле- чения корня 13, нелинейный элемент 16 вида y arcsin (х) , второго блока деления 15, нелинейного элемента 11 виде y arctg(x), блока принятия решения Ь, сумматора по модулю два 9, блока вычитания 17 обеспечивает обработку в течение одного гакта од- нополосного сигнала данных, что позволяет уменьшить влияние на точность восстановления фазы несущего колебания сигнала данных и помехи типа зовое дрожание. 1 ил.
fta
(Л
Изобретение относится к технике святи и может быть использовано при построении высокоскоростных устройств преобразования сигналов аппаратуры передачи данных.
Целью изобретения является повыше- ние точности при обработке однополоеного сигнала данных
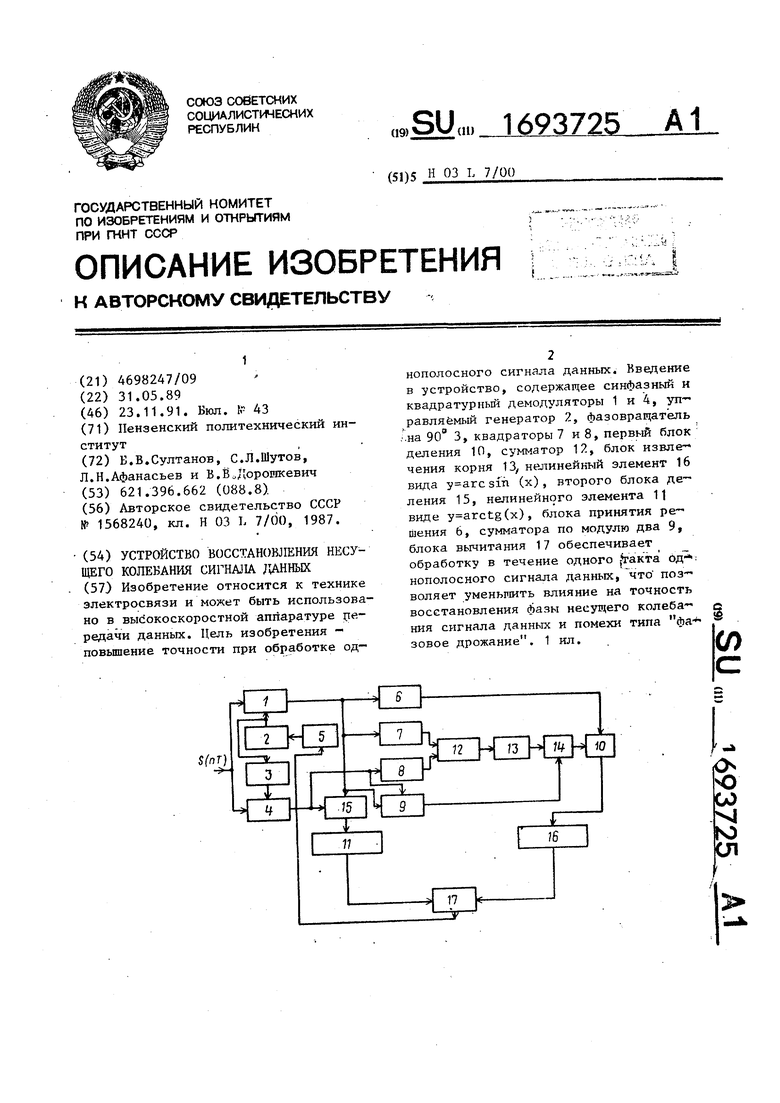
На чертеже приведена структурная схема предлагаемого устройства.
Устройство содержит синфазный де- модулятор 1, управляемый генератор 2, фазовращатель 3 на 90°, квадратурный демодулятор 4, фильтр 5, блок 6 при- нятия решения, первый 7 и второй 8 квадраторы, сумматор 9 по модулю два, первый блок 10 деления, нелинейный элемент 11 вида y arctg(x), сумматор 12, блок 13 извлечения корня, блок 14 умножения на знак, второй блок 15 деления, нелинейный элемент 16 вида y arcsm(x) и блок 17 вычитания .
25
9
Устройство работает следующим образом.
В предположении цифровой реализации обработке подвергаются дискретные отсчеты сигналов, представленные в виде кода, отделенные друг от друга 30 тактовым интервалом Т и совпадающие с моментами принятия решения в блоке 6 принятия решения.4 Положим, что одному из таких моментов соответствует ,где i - целое число. Тогда отсчетзз входного сигнала S(iT) в этот момент времени определяется как
S(iT)f(iT)cosOii T+f(iT) sinCO iT, (1 i + m
(2)
(3)
f(W ёа„н(1-п) т,
i+m
f(iT) ) T
Этот сигнал демодулируется в синфазном демодуляторе 1 с помощью вырабатываемых управляемым генератором 2 отсчетов опорного колебания 2 cos (COi Т+ф) и в квадратурном демодуляторе 4 с помощью сдвинутых пос редством фазовращателя 3 на 90 по фазе отсчетов опорного колебания 2sЈn(GDiT+P) . В результате на выходах синфазного 1 и квадратурного 4 демодуляторов появляются сигналы, описываемые соотношениями л
f (iT)f (iT) cosP -f(iT)sin$, .(4) - f CiT)-f(iT) cosP+fU-OsfnP. (5)
:
.
1
JQ
уг
25
9
30 тзз
1)
40
45
Положим, что рассматривается система в некоторый момент времени , которому соответствует значение , Тогда выражения (4) и (5) примут вид f (0)-f (0) (0) , f (0)f(0) (0) или с учетом (2) и (3) m
f (0) 21awR(-nT cos 9 - го yu-vti
- Q(-nT) sin,(b)
h-w
r m
m
(7)
f ,(0)2anQ(-n T) cosP +
+ 2 R C-nTC) s in P.
Учитывая, что K(+ nT) 0 при всех целых К(0)1, можно записать Yn
2 a R(4iT)(0)-a6. (8)
С целью сокращения громоздкости проводимых математических выкладок введем обозначение
to
(K-nT) an, (9);
тогда с учетом (8) и (9) выражения (6) и (7) можно записать в виде
Ј (0)ао cos , (10) f (0)qucos P + . (11) Полученные соотношения можно рассматривать как систему двух уравнений с двумя неизвестными. Действительно, величины f (H) и г (0) представляют собой отсчеты сигнала в момент на выходах синфазного 1 и квадратурного 4 демодуляторов, величина а„ может быть определена посредством блока 6 принятия решения на основе анализа сигнала f (0), величины Р и q, являются неизвестными.
Решая эту систему уравнения, получим
P.
arcsin
.а о
У7Т(0)):
- arctg arctg , (()) ,
(12)
Выражение (12) неоднозначно, так как в нем не определен знак квадратного корня. Можно показать, что знак корня в выражении (12) может быть
определен как результат сложения по модулю два знаков (0) и f (0) .
Задачей блока b принятия решения в системах с однополосной фазовой мо- дуляцией является определение поляр-™
.ности демодулированного сигнала на его входе в тактовый момент времени. Эту функцию может выполнить обычный нуль-орган. В том случае, если сигнал на входе блока 6 принятия решения положителен, на его выходе появляется +1, если отрицателен - -1. Если- используется комбинированный сигнал с одкополосной амплитудно-фазовой модуляцией, то блок принятия решения должен не только определять полярность, но и оценивать значение амплитуды принимаемого сигнала. В этом случае наряду с нуль-органом он включает пороговые элементы, уровни срабатывания которых настроены на среднее между двумя ближайшими используемыми при модуляции уровнями амплитуд значение,
И в том и в другом случае принятие решения осуществляется сразу по поступлении демодулированного сигнала, производится в одном такте, не снижает способность .устройства
.следить за. быстрыми флуктуациями фазы, обусловленными фазовым дрожанием.
Используя определенные в каждом такте значения сигналов с- выхода синфазного демодулятора 1 f (0) и квадратурного демодулятора 4 f (0) и оценку решения ав с выхода блока 6 принятия решения, устройство позволяет точно определить фазовое рассогласование Ф , свободное от помехи, вызванной усреднением информационной составляющей сигнала, кроме того, значение v определяется в течение того же такта, в котором анализируются отсчеты f (0), г (0) и а0, и может быть введено на управление управляемым генератором 2 уже в следующем такте, поэтому предлагаемое устрой0
5
0
5
0
5
0
5
ство позволяет эффективно отслежийать относительно быстрые флуктуации фазы, вызванные помехой типа фазовое дрожание .
Формула изобретения
Устройство восстановления несу- ,щего колебания сигнала данных, содержащее последовательно соединенные синфазный демодулятор, первый квадратор, сумматор, блок извлечения корня, первый блок деления и нелинейный элемент вида y arcs iri(x) , последовательно соединенные фильтр, управляемый генератор, фазовращатель на 90, квадратурный демодулятор и второй квадратор, выход которого подключен к второму входу сумматора, выход управляемого генератора подключен также к первому входу синфазного демодулятора, вторые входы синфазного и квадратурного демодуляторов являют- ся входом устройства, отличающееся тем, что, с целью повышения точности при обработке однополое ного сигнала данных, в него введены узел принятия решения, включенный между выходом синфазного демодулятора и вторым входом первого блока деления, узел умножения на знак, включен- ный между блоком извлечения корня и первым блоком деления, последовательно включенные второй блок.деления, нелинейный элемент вида у arctg(x) и блок вычитания, выход которого соединен с входом фильтра, сумматор по модулю два, первый и второй входы которого соединены с первым и вторым входом второго узла деления и соединены с выходом синфаз- ного демодулятора и с выходом квадратурного демодулятора соответственна, выход блока определения знака корня соединен с вторым входом блока умножения на знак, а выход нелинейного элемента вида у arc sin(x) соединен с вторым входом блока вычитания.