Изобретение относится к строительно-дорожным машинам, в частности к системам автоматического управления рабочим процессом скрепера.
Цель изобретения - повышение точности при управлении ковшом скрепера с регулируемым ножом.
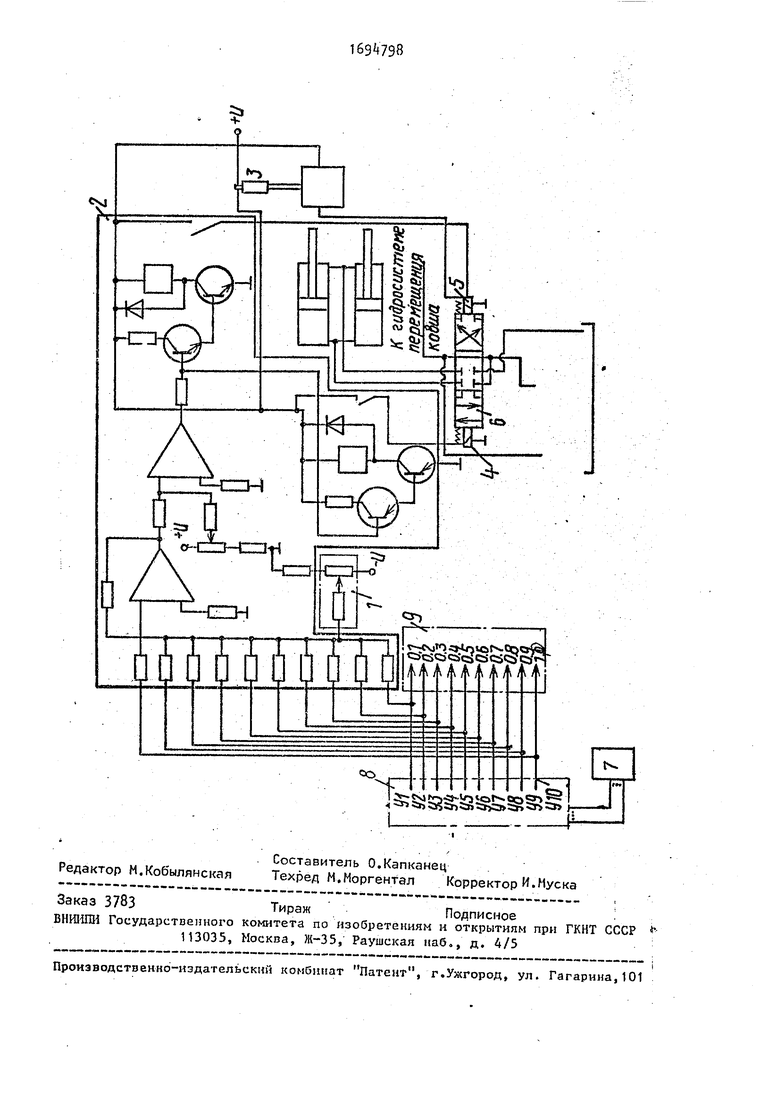
На чертеже изображена функциональная схема устройства управления ковшом скрепера.
Устройство управления ковшом скрепера содержит датчик 1 угла резания, соединенный с суммирующим компаратором 2, выходы которого подключены к рукоятке 3 управления и к электромагнитам А и 5 электрогидрораспредели- теля 6 гидросистемы перемещения ковша, датчики 7 уровня грунта подключены к соответствующим входам блока 8 логической обработки сигналов, выходы которого соединены с суммирующим компаратором 2 и индикатором 9.
Устройство управления ковшом скрепера работает следующим образом.
В начале работы ковш грунтом не заполнен. Сигналы выходов блока 8 логической обработки сигналов I отсутствуют.
Сигнал отрицательной полярности i от датчика 1 угла резания поступает
О
ю
4 XI Ю 00
316
на вход суммирующего компаратора 2. | В результате напряжение поступает но электромагнит 4, который перемещает золотник распределителя б вправо, тем самым устанавливая минимальный угол резания ножа, который направляет столб грунта в заднюю часть ковша. По мере заполнения ковша сигналы от датчиков 7 поступают на входы блока 8 логической обработки сигналов. Сигнал Y, соответствующий коэффициенту наполнения - 0,1, i вырабатывается при срабатывании датчика первого уровня по сигналу Х,
Xg или Ха. При поступлении сигнала Y, на вход суммирующего компаратора 2 напряжение питания поступает на электромагнит 5, что вызывает увеличение угла резания. Увеличение угла резания происходит до тех пор, пока сигнал от датчика 1 не станет равен сигналу У. Появление сигналов Yj, YЈ и т.д. аналогичным образом приводит к увеличению угла резания.
Сигналу vf0 соответствует коэффициент наполнения - 1,0 и максимальный угол резания. Информация о степени заполнения ковша индицируется на индикаторе 9, установленном в кабине машины.
Формирования сигналов в блоке 8 логической обработки сигналов осуществляется следующим образом.
Для определения коэффициента заполнения ковша выбирают ряд его значений 0,1; 0,2, 0,3, 0,4;- 0,5, 0,6, 0,7; 0,8; 0,9; 1,0. Принимаем Y. 0,1; Y2 0,2; Y3 0,3; Y4 0,4; , Y5 0,5; YC 0,6; Y7
0,7; YS 0,8; Y9 0,9; ,o.
При анализе вариантов учитывают лишь те комбинации сработавших дат0 чиков, которые физически возможны. Тогда зависимость значений коэффициента заполнения ковша может быть выражена системой логических функций (СЛФ), которая после преобразований
5 и минимизации запишется 1 в виде
5
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ЧАСТОТЫ ВРАЩЕНИЯ ВАЛА | 1993 |
|
RU2084899C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОТКАЗОВ В ШАГОВОМ ЭЛЕКТРОПРИВОДЕ | 2012 |
|
RU2523047C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ МАШИНЫ ДЛЯ СКАЧИВАНИЯ ШЛАКА | 2021 |
|
RU2832218C2 |
| Способ получения пептидов | 1985 |
|
SU1530097A3 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ КОЭФФИЦИЕНТА ПУЛЬСАЦИЙ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 1994 |
|
RU2080607C1 |
| ПРИБОР КОНТРОЛЯ ЗНАНИЙ | 1994 |
|
RU2110096C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 2011 |
|
RU2516528C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ПЛАВКИ МЕДНО-НИКЕЛЕВОГО СУЛЬФИДНОГО СЫРЬЯ В ПЕЧИ ВАНЮКОВА ПРИ ПЕРЕРАБОТКЕ СУЛЬФИДНОЙ ШИХТЫ НА ШТЕЙН | 2013 |
|
RU2571968C2 |
| УСТРОЙСТВО ДЛЯ ВЫДАЧИ СООБЩЕНИЙ | 1992 |
|
RU2032936C1 |
| ЧЕТЫРЕХТАКТНЫЙ РЕВЕРСИВНЫЙ РАСПРЕДЕЛИТЕЛЬ ИМПУЛЬСОВ ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ОДИНОЧНЫХ ОШИБОК | 2010 |
|
RU2475933C2 |
Изобретение относится к строительно-дорожным машинам. Цель изобретения - повышение точности при управлении ковшом скрепера с регулируемым ножом. Для этого на ковше скрепера устанавливают п-датчиков уровня грунта, которые соединяют с соответствующими входами блока логической обработки сигналов В последнем осуществляется обработка сигналов от датчиков уровня грунта, которые в данный момент срабатывают. Сигналы от блока логической обработки сигналов поступают на суммирующий компаратор и индикатор. Суммирующий компаратор выдает сигналы на электромагниты гидроэлектрораспреде- лителей гидросистемы перемещения ковша. В результате происходит увеличение или уменьшение угла резания ковша скрепера. 1 ил. I
(1)
Y, X,
YЈ ХД(Х,ХЭ);
Y3 (Х,)();
Y4 X,&X2&X9&(X4lXs X6 X7)X2XX34XebX,X,bXz&X4&X5;
Y5 Xt& Xg&.Xj&MX, IX5&X6IX Xg) IXg&X 3&X6&X7&X 0 Х2& Х4&Х5 Хв ;
уб Ъ (Xgfc x7 & (x5 x,0) xs& x6& x9 (x6ix8)) ;
Y7 X5&X6& (X7& (Xs X,0 } X4&(XalX9) X4jXT);
Ґ8 , (X4& X8& X7& X,0 X4bX7)Xi&j(gj2bX4iX4X6Xf((0);
Y9 Xjne&XjW
Xj& XijS-Xjit XgK X7i-Xg&Xgu(
(1), полученная из исходной путем преобразования и минимизации по правилам алгебры логики, может быть дополнительно минимизирована путем удаления комбинаций, которые технологически невозможны, т.е. таких комбинаций сработавших датчиков. которые не могут быть достигнуты при любом возможном варианте набора, грунта. В СЛ (1) эти комбинации выделен подчеркиванием прямой линией.
При нарушениях в работе датчиков возможны искажения информации, что может привести к погрешности в работе системы управления. Для снижения влияния на работу системы сбоев
датчиков нужно уменьшить их число, от которого зависит каждое конкретное значение коэффициента заполнения ковша. Поэтому, описывая формирование знаиений коэффициента заполнения, нецелесообразно исключить показания датчиков нижних уровней при наличии информации о заполнении верхних уровней. Эти комбинации выделены волнистой линией. Выбор удаляемых комбинаций выполнен с учетом требований к полноте и достоверности поступающей информации.
После удаления из СЛ (т) выделенных комбинаций получаем СЛФ вида
X, X,
IX,
з; x2&(x«ixs);
x2&x3S(x,);
Х,&()Хб&Х7;
(2)
ии СГ№
8 логической обработки
(X4fc()XrfcX(0);
Yfi ХДЛХ7&(,0)ХГДХ9),
Y7 XjJrXg&Xj&CXjj ),
Yg X5ftX X7X(XqJKX Xw)X4iX10);
(Xg ),
.
(2)выполнен
тором, суммирую в гидросистему включен дополни
Формула изобретения
Устройство управления ковшом скрепера, включающее датчики уровня грунта, установленные в различных точках ковша, и гидросистему перемещения ковша, отличающееся тем, что, с целью повышения точности при управлении ковшом скрепера с регулируемым ножом, оно снабжено датчиком угла резания ножа, блоком логической обработки сигналов, индикатором, суммирующим компаратором, а в гидросистему перемещения ковша включен дополнительный электромагнитный распределитель, при этом выход каждого датчика уровня грунта подключен к соответствующему входу блока логической обработки сигналов, выходы которого соединены с индикатором и с первыми входами суммирующего компаратора, к второму входу которого подключен датчик угла резания ковша, выходы суммирующего компаратора соединены с соответствующими
электромагнитами дополнительного электромагнитного распределителя.
| Авторское свидетельство СССР Vf , кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления ковшом скрепера | 1987 |
|
SU1578278A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ( УСТРОЙСТВО УПРАВЛЕНИЯ КОВШОМ СКРЕПЕРА | |||
