И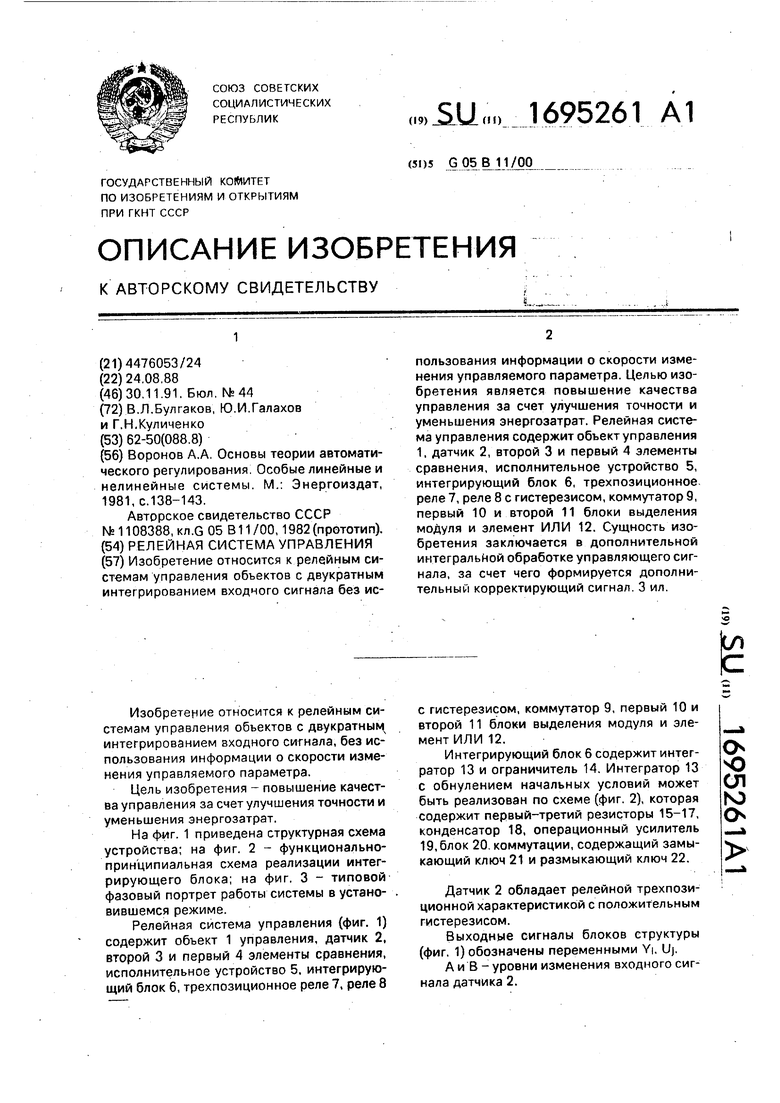
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| Релейная система управления | 1988 |
|
SU1624402A2 |
| Способ управления электродвигателем с вентильным преобразователем и устройство для его осуществления | 1990 |
|
SU1833956A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Релейный регулятор | 1990 |
|
SU1836658A3 |
| Релейная система управления | 1982 |
|
SU1108388A1 |
| Позиционный регулятор для систем с запаздыванием | 1987 |
|
SU1427328A1 |
| Трехпозиционный регулятор | 1984 |
|
SU1259208A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
Изобретение относится к релейным системам управления объектов с двукратным интегрированием входного сигнала без использования информации о скорости изменения управляемого параметра. Целью изобретения является повышение качества управления за счет улучшения точности и уменьшения энергозатрат. Релейная система управления содержит объект управления 1, датчик 2, второй 3 и первый 4 элементы сравнения, исполнительное устройство 5, интегрирующий блок 6, трехпозиционное реле 7, реле 8 с гистерезисом, коммутатор 9, первый 10 и второй 11 блоки выделения модуля и элемент ИЛИ 12. Сущность изобретения заключается в дополнительной интегральной обработке управляющего сигнала, за счет чего формируется дополнительный корректирующий сигнал 3 ил
Изобретение относится к релейным системам управления объектов с двукратнымч интегрированием входного сигнала, без использования информации о скорости изменения управляемого параметра.
Цель изобретения - повышение качества управления за счет улучшения точности и уменьшения энергозатрат.
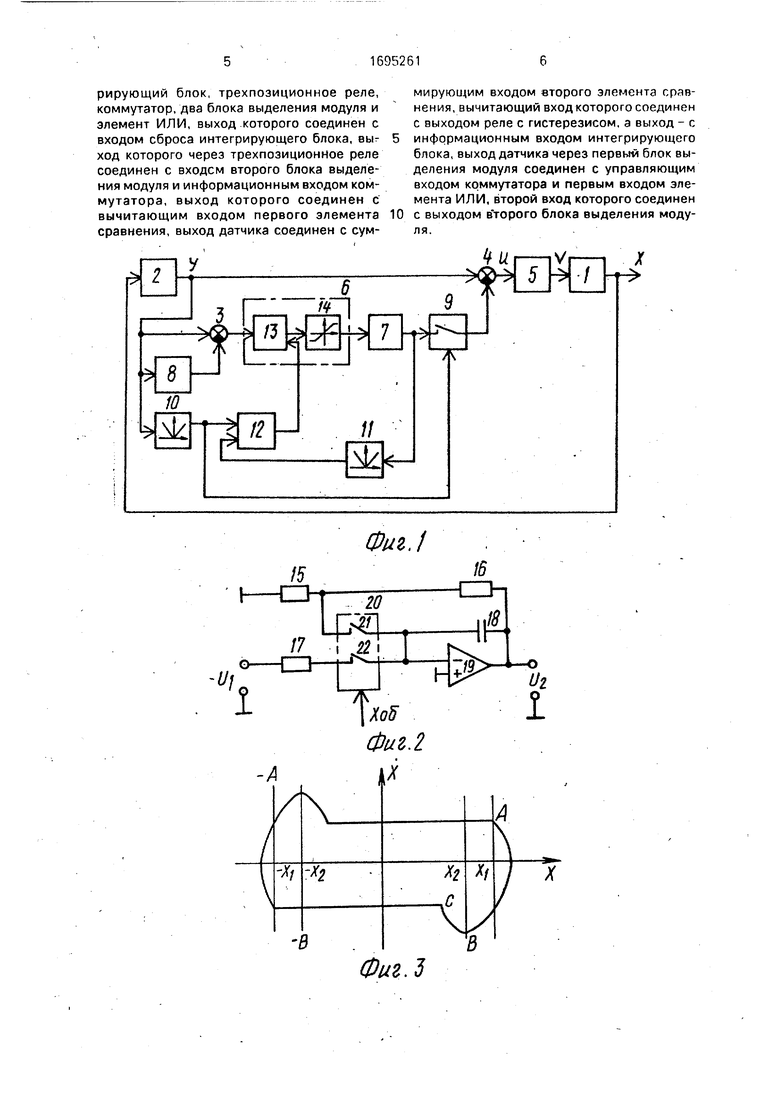
На фиг. 1 приведена структурная схема устройства; на фиг. 2 - функционально- принципиальная схема реализации интегрирующего блока, на фиг. 3 - типовой фазовый портрет работы системы в установившемся режиме.
Релейная система управления (фиг. 1) содержит объект 1 управления, датчик 2, второй 3 и первый 4 элементы сравнения, исполнительное устройство 5, интегрирующий блок 6, трехпозиционное реле 7, реле 8
с гистерезисом, коммутатор 9, первый 10 и второй 11 блоки выделения модуля и элемент ИЛИ 12.
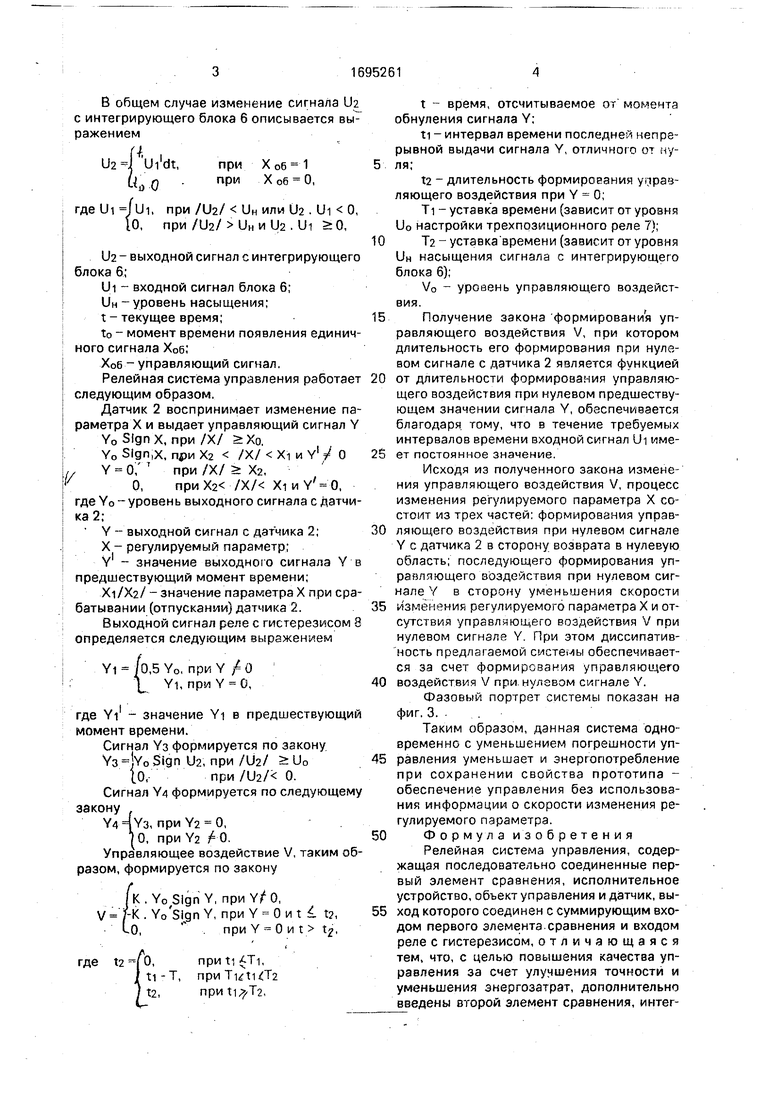
Интегрирующий блок 6 содержит интегратор 13 и ограничитель 14. Интегратор 13 с обнулением начальных условий может быть реализован по схеме (фиг 2), которая содержит первый-третий резисторы 15-17, конденсатор 18, операционный усилитель 19, блок 20 коммутации, содержащий замыкающий ключ 21 и размыкающий ключ 22.
Датчик 2 обладает релейной трехпози- ционной характеристикой с положительным гистерезисом.
Выходные сигналы блоков структуры (фиг. 1) обозначены переменными Yi, Uj
А и В - уровни изменения входного сигнала датчика 2.
ON Ю
сл
Ю
Оч
В общем случае изменение сигнала U с интегрирующего блока 6 описывается вы ражением
(Ч ,
Ui dt,при
Qo Q . при X об О,
где Ui JUi, при /U2/ UH или U2 . Ui 0, 10, при /U2/ UH и U2 . Ui 0,
U2 - выходной сигнал с интегрирующего блока 6;
1М - входной сигнал блока 6;
UH -уровень насыщения;
t - текущее время;
to - момент времени появления единичного сигнала Хоб;
Хоб - управляющий сигнал,
Релейная система управления работает следующим образом.
Датчик 2 воспринимает изменение параметра X и выдает управляющий сигнал Y
Yo SfgrtX, при /X/ Хо,
Уо Sign.x, при Х2 /X/ Xi и Y1 4 О
Y О, т при /X/ Х2,
О, приХа /Х/ Х1И Y 0, где Yo - уровень выходного сигнала с датчика 2; Y - выходной сигнал с датчика 2;
X - регулируемый параметр;
Y1 - значение выходною сигнала Y в предшествующий момент времени;
Xi/Xa/ - значение параметра X при срабатывании (отпускании) датчика 2.
Выходной сигнал реле с гистерезисом 8 определяется следующим выражением
Yi /0,5 Yo, при Y /-- О L Yi, npwY 0,
где Yi - значение Yi в предшествующий момент времени.
Сигнал Уз формируется по закону
Уз JY0 Sign U2, при /U2/ a: U0 О,при /U2/ 0.
Сигнал Y4 формируется по следующему закону
Y4HY3, при Y2 0, |0, при Y2 Ј0.
Управляющее воздействие V, таким образом, формируется по закону
(К. YoSign Y, при YjrO, V /-К . Yo Sign Y, при Y 0 и t i. t,
LO, Y 0 и t t,
где
при ti ЈTi, приТиШТ2
при ,
t - время, отсчитываемое от момента обнуления сигнала Y;
ti - интервал времени последней непрерывной выдачи сигнала Y, отличного от нуля;
t2 - длительность формирования управляющего воздействия при Y 0;
Ti - уставка времени (зависит от уровня Uo настройки трехпозиционного реле 7);
0 Т2 уставка времени (зависит от уровня UH насыщения сигнала с интегрирующего блока 6);
V0 - уровень управляющего воздействия.
5Получение закона формирования управляющего воздействия V, при котором длительность его формирования при нулевом сигнале с датчика 2 является функцией
0 от длительности формирования управляющего воздействия при нулевом предшествующем значении сигнала Y, обеспечивается благодаря тому, что в течение требуемых интервалов времени входной сигнал Ui име6 ет постоянное значение.
Исходя из полученного закона изменения управляющего воздействия V, процесс изменения регулируемого параметра X состоит из трех частей: формирования управ0 ляющего воздействия при нулевом сигнале Y с датчика 2 в сторону возврата в нулевую область; последующего формирования управляющего воздействия при нулевом сигнале Y в сторону уменьшения скорости
5 изменения регулируемого параметра X и отсутствия управляющего воздействия V при нулевом сигнале Y. При этом диссипатив- ность предлагаемой системы обеспечивается за счет формирования управляющего
0 воздействия V при нулевом сигнале Y.
Фазовый портрет системы показан на фиг, 3.
Таким образом, данная система одновременно с уменьшением погрешности уп5 равления уменьшает и энергопотребление при сохранении свойства прототипа - обеспечение управления без использования информации о скорости изменения регулируемого параметра.
0 Формула изобретения
Релейная система управления, содержащая последовательно соединенные первый элемент сравнения, исполнительное устройство, объект управления и датчик, вы5 ход которого соединен с суммирующим входом первого элемента сравнения и входом реле с гистерезисом, отличающаяся тем, что, с целью повышения качества управления за счет улучшения точности и уменьшения энергозатрат, дополнительно введены второй элемент сравнения, интегрирующий блок, трехпозиционное реле, коммутатор, два блока выделения модуля и элемент ИЛИ, выход которого соединен с входом сброса интегрирующего блока, выход которого через трехпозиционное реле соединен с входом второго блока выделения модуля и информационным входом коммутатора, выход которого соединен с вычитающим входом первого элемента сравнения, выход датчика соединен с сум0
мирующим входом второго элемента сравнения, вычитающий вход которого соединен с выходом реле с гистерезисом, а выход - с информационным входом интегрирующего блока, выход датчика через первым блок выделения модуля соединен с управляющим входом коммутатора и первым входом элемента ИЛИ, второй вход которого соединен с выходом в торого блока выделения модуля.
Фиг.1
| Воронов А.А Основы теории автоматического регулирования Особые линейные и нелинейные системы М | |||
| Энергоиздат, 1981,с.138-143 Авторское свидетельство СССР № 1108388, кл.С 05 В11 /00,1982 (прототип). |
