Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления станками.
Цель изобретения - уменьшение annaj ратурных затрат и повышение быстродействия.
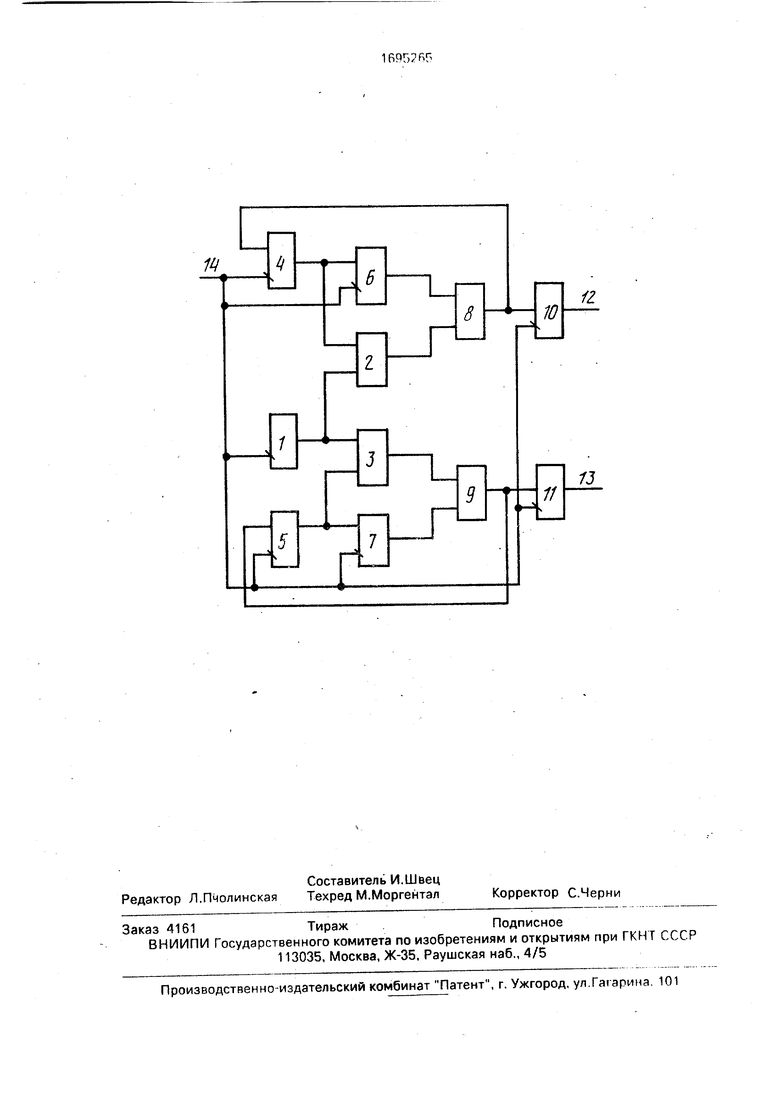
На чертеже изображена структурная схема устройства.
Устройство содержит регистр 1 ввода заданного коэффициента, умножители 2 и 3, регистры 4-7 записи координат, сумматоры 8 и 9, регистры 10 и 11 хранения результата и выходы 12 и 13 координатных каналов линейно-кругового интерполятора. Управляющие входы регистров 1, 4-7, 10 и 11 соединены с тактирующим входом 14 устройства.
Устройство работает следующим образом.
Перед началом вычислений координат (1+1)-й точки в регистр 1 заносится значение коэффициента К, а в регистры 4(5) и 6(7) ранее вычисленные координаты двух предшествующих точек траектории Xi(Yi) и Xi-i(Yi-t) соответственно.
В исходном состоянии в регистры 4(5) записаны координаты точки, отстоящей на зеличину шага интерполяции h от точки начала кадра.
Координаты точки начала кадра заносятся в регистры 6(7), т.е они обнуляются (цепи установки начальных значений регистров 1, 4, 5, 6, 7 условно не показаны).
Вычисление координат коэффициентов производится согласно следующим предпосылкам.
Обозначим через h величину шага интерполяции некоторой кривой у f(x). Считаем заданными (полученными на предыдущем этапе) координаты точек А(Х0, Y0) и
О
ю ел ю
О
ел
B(Xt, YI), лежащих на кривой на расстоянии h друг от друга, координаты точки А(Х0, Y0) совмещаются с началом координат,При интерполяции участка кривой необходимо вычислить координаты точек, лежащих на у f(x) на расстоянии h друг от друга.
В данном случае, считаем А - начальной точкой, совпадающей с началом координат.
Предположим, что А и С являются точками пересечения окружности Q радиусом h с центром в точке В и кривой у f(x).
Тогда координаты точки С(Ха, YS) можно получить, решив систему уравнений:
- для линейной интерполяции
Y kx;
и
(х - xi)z + (у - ytf г/;
|2 ц2.
(1)
-для круговой интерполяции
х2 + у2 R2
(x-X1)2 + (y-yi)2 h2,(2)
где R - радиус интерполируемой окружности;
k - коэффициент интерполируемой прямой,
Выполнив в системах (1) и (2) подстановку первого уравнения во второе, например, для линейной интерполяции,получают квадратное уравнение:
х2-2xxi - xi2 ---Ь- 0 .(3)
1 + k2
По теореме Виета х2 2xi - х0.(4)
Решая систему (1) относительно Y, имеем
У2 2у - уо.(5)
Те же действия для круговой интерполяции дают выражения
x2-2(1l-h2/2R2)xi-x0;(6)
У2 2(1 -h2/2R2)yi-y0.(7)
Для получения координат точек, следующих за С, необходимо сдвинуть на величину h центр окружности Q вдоль кривой и решить систему уравнений (1) либо (2), в зависимости от вида интерполяции.
Таким образом, для определения на каждом шаге интерполяции координат (1+1)- й точки, необходимо выполнить следующие вычисления:
Xi+i KXi-Xi-i;
Yi+i KYi-Yi-i.W
где К- коэффициен для линейной интерполяции К 2; для круговой интерполяции
1,2
К 2(12 R2
Выходы регистра 1 заданного коэффициента находятся в высокоимпедансном состоянии, выходы регистров 4(5) и 6(7) - в активном.
По положительному перепаду тактирующего сигнала на входеч14 устройства выходы регистра 1 заданного коэффициента переводятся в активное состояние к на его
выходах появляется значение коэффициента К, которое умножается на умножителе 2(3) на содержимое регистра 4(5), таким образом, на выходах умножителя 2(3) Формируется произведение KXi(KYi), которое
0 поступает на первые входы сумматора 8(9), на вторых входах сумматора 8(9) присутствует содержимое регистра 6(7), в результате на выходе сумматора 8(9) формируется значение KXi - Xi-i(KYi - YM), равное X,+i(Yi+i)
5 Затем по отрицательному перепаду тактирующего сигнала вычисленное значение XH-I(YI-M) фиксируется в регистре результата и поступает на соответствующий выход
0 12(13) устройства, а также одновременно с этим Xi+i(Yi+i) записывается в регистр 4(5), предыдущее значение которого переписывается в регистр 6(7).
Устройство готово к вычислению коор5 динат следующей точки.
Длительность тактирующего сигнала 14, определяется требуемым темпом поступления координат.
Формула изобретения
0Линейно-круговой интерполятор, содержащий регистр ввода заданных коэффициентов и в каждом координатном канале первый регистр записи координат, умножитель и сумматор, первая группа входов которого соеди5 нена с группой выходов умножителя, первая группа входов которого соединена с разрядными выходами регистра ввода заданных коэффициентов, вторая группа входов - с разрядными выходами первого регистра за0 писи координат, отличающийся тем, что, с целью уменьшения аппаратных затрат и повышения быстродействия путем изменения алгоритма работы интерполятора, в каждый координатный канал введены второй
5 регистр записи координат и регистр хранения результата, группа информационных входов которого подключена к разрядным зыходам сумматора и группе информационных входов первого регистра записи координат, разряд0 ные выходы которого соединены с группой информационных входов второго регистра записи координат, разрядные выходы которого подключены к второй группе входов сумматора, управляющие записью входы регистра ввода за5 данных коэффициентов и в каждом канале первого и второго регистров записи координат и регистра хранения результата соединены с тактирующим входом линейно-кругового интерполятора, информационными выходами которого являются разрядные выходы регистров хранения результата каждого координатного канала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейно-круговой интерполятор | 1982 |
|
SU1149218A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1302241A2 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Круговой интерполятор | 1989 |
|
SU1665341A1 |
| Линейно-круговой интерполятор | 1983 |
|
SU1265700A2 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Линейно-круговой интерполятор | 1977 |
|
SU732818A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
Изобретение относится к вычислительной технике и может быть использовано в системах числового программного управления станками. Целью изобретения является уменьшение аппаратных затрат и повышение быстродействия Поставленная цель достигается тем, что в состав линейно-кругового интерполятора, содержащего регистр ввода заданных коэффициентов и в каждом координатном канале первый регистр записи координат, умножитель и сумматор, введены второй регистр записи координат и регистр хранения результата. 1 ил.
| Линейно-круговой интерполятор | 1974 |
|
SU500518A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1302241A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
