Изобретение относится к автоматическому управлению и предназначено для испсшьзования в контурных системах программного управления станками,
Известен линейно-круговой интерполятор, построенный на основе цифровых дискретных анализаторов (ЦДА) 1,
Основной его недостаток - большая разрядность вычислений, определяемая необходимой точностью вычислений.
Наиболее близким по технической сущности к изобретению является 15 линейно-круговой интерполятор с большим шагом интерполяции, основанный на интегрировании величин X и Y. Он содержит первый и второй регистры, соединенные соответственно через 20 первый и второй вентили с первой управляющей шиной, делитель частоты, соединенный со входами третьего и четвертого вентиля, управляющие входы KOTOt«x соединены соответст- 25 веяно с второй и третьей управляющими шинами, первую и вторую входные и выходные шины 2.
Устройство в режиме круговой интерполяции реализует в соседних вычис- ЗО
лительных циклах поочередно следующие алгоритмы: 1) Г Xi П R
АУ;
V V
+ й у, Н 1
10 Yivi
л х-, П-,
Xi, Xi +UX-, Yi + ., Yi +Д Yj
В режиме линейной (Интерполяции отсутствует сигнал на первой управляющей шине и на Выходные шины поступают соответственно,сигналы Y и X в результате реализации следующего алгоритма:
1 Ai
L X к
n-i дх.,
П( YK
&Yi
П
Известное устройство в режиме круговой интерполяции воспроизводится контур окружности с контурной погрешНОСТ1ПОвК,а в режиме линейной интер Гполяции воспроизводит контур прямой с контурной погрешностью б.ПогрешностибК и 61, измеряются по нормал к интерполируемомуiконтуру и являют ся соответственно суммой возникающи в каждом цикле вычислений контурных шаговых погрешностей б R и 6 L. Погрешность 5 R имеет две состав лякяш е: контурную шаговую методичес кую погрешность б R которая опре деляется приближенным характером формул в алгоритме интерполяций, по которым определяются величины ЛХ и лУ: контурную шаговую вычислительную погрешность tf R , которая определяется приближенным характером вычислений по формулам алгоритма интерполяции. ПогрешностьсГ Rfr имеет две состав ляющие: d R$4 и 5 Rgj.Погрешность f R возникает при расчете величины АХ иду с определенной точностью. Погрешность S Rf, возникает при использовании в формулах для расчета величин л X и лУ приближенных значений координат X и У. Погрешность 5 много раз больше погрешности d . является определяю tueft в погрешности 6 Re. Для получения допустимой величины погрвиности б RU.B известном устройстве разрядность вычислений превьвпает разрядность исходных данных в 2 раза, и вычисления произ водятся с точностью . Погрешность f L в отличие от круговой интерполяции имеет одну составляющу d L, которая состоит только из погрешности б L. Необходимая разрядность вычислений при линейной иитерполяции та же, что и при круговой. Цель изобретения - упрощение кон ,струкции путем уменьшения разрядЮности шлчислительных блоков. Для достижения цели линейно-круговой интерполятор, содержащий перв делитель и в каждом координатном Канале первый вентиль, вход которог подключен к выходу первого делителя я регистр, вход которого подсоедине к выходу второго вентиля, причем первый вхсщ второго вентиля каждого канала соединен с входом интерполятора, дополнительно содержит в каждом координатном канале второй делитель, першлй и второй входы которого подключены к выходам регистра и первого вентиля соответственно, первый выход - ко входу регистра данного координатного канала, а второй выход - ко второму входу второго вентиля другого координатного канала.
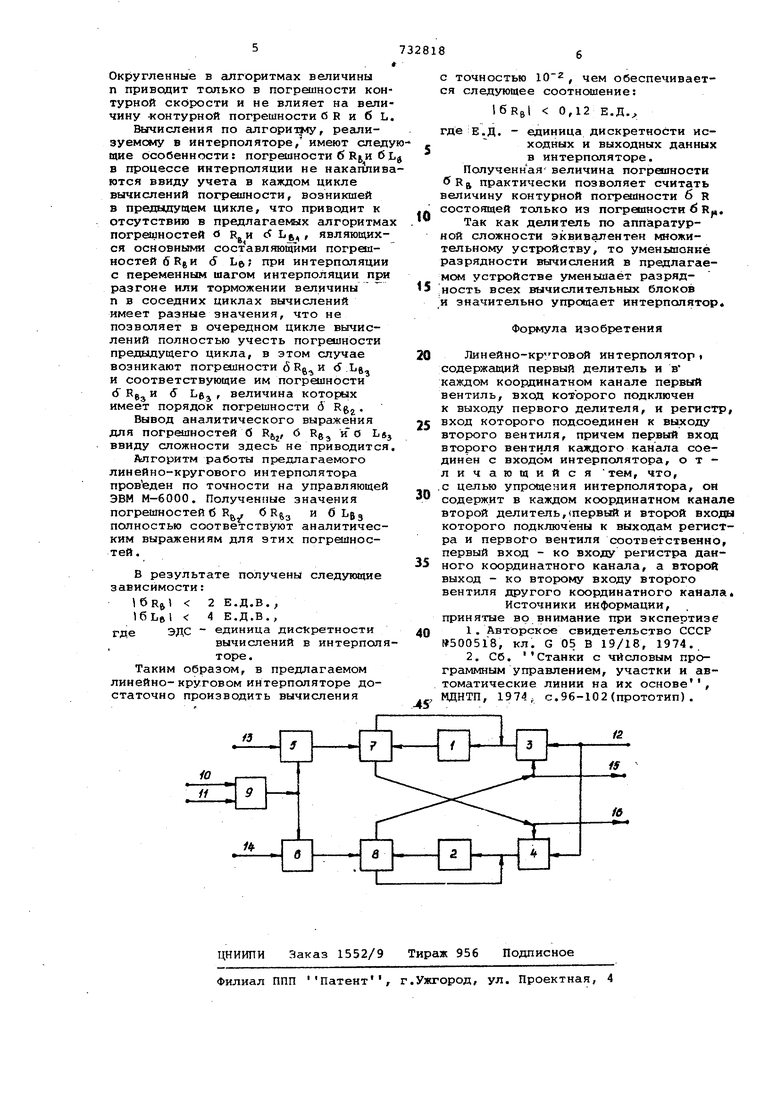
На чертеже приведена блок-схема интерполятора.
Y . V . -4- V KiM Ki OCt.t Схема содержит первый 1 и второй 2 регистры, вторые 3 и 4 и первые 5 и б вентили, вторые 7 и 8 и первый 9 делители, входы 10 и 11, управляющие шины 12-14, а также выходные шины 15 и 16. Устройство работает следующим образом . На входах 10 и 11 задаются соответственно величины R или L, а на выходе делителя 9 формируется величина п ( ц , где ц - частное при делении нацело. По сигнашу с шины 13 на выходе делителя 7 формируется величина У при круговой интерполяции и д х при линейной интерполяции. С выхода остатка величина X где ост. - остаток при делении нацело, поступает на регистр 1, где формируется величина Xi Х; + Хосл.) По сигналу с шины 14 на выходе делителя 8 формируется величиналУ или лХ, ас выхода остатка величина У0р,поступает на регистр 2, где формируется величина U1 Y) УОИЧ Таким образом, в предлагаемом линейно-круговом интерполяторе в режиме круговой интерполяции в соседних вычислительных циклах реализуются следующие алгоритмы: Yoc,r (-КГ У;„ У-, ,,, Xi + аХ, X , X, + 1Х1л I | YOC, i V -( YH, Y, + ДУ, Y. Y -I- t У, UlI A Л, Y- Y. + Y X,, - X;, f- XOCTI HI щ OCl.i a в режиме линейной интерполяции следующий алгоритм: п (-V- )u Хос,.Г (if-)-V V 4- Y 00.i Y-vfr. (
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейно-круговой интерполятор | 1982 |
|
SU1149218A1 |
| Круговой интерполятор | 1989 |
|
SU1665341A1 |
| Линейно-круговой интерполятор | 1989 |
|
SU1695265A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1302241A2 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Линейно-круговой интерполятор | 1978 |
|
SU860004A2 |
| Линейно-круговой интерполятор | 1977 |
|
SU734615A1 |
| Круговой интерполятор | 1978 |
|
SU798730A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Устройство для управления многокоординатным оборудованием | 1987 |
|
SU1427334A1 |
