(54) ПРИВОД,НАПРИМЕР ХОНИНГОВАЛЬНОГО СТАНКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод хонинговального станка | 1988 |
|
SU1696278A1 |
| Резьбонарезная силовая головка | 1982 |
|
SU1047647A1 |
| ВИНТОВОЙ ПРЕСС | 1973 |
|
SU362707A1 |
| ШПИНДЕЛЬНЫЙ УЗЕЛ МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1972 |
|
SU335451A1 |
| Хонинговальный станок | 1971 |
|
SU438524A1 |
| Силовая головка | 1989 |
|
SU1742035A1 |
| Исполнительный орган технологического ротора | 1986 |
|
SU1349967A1 |
| Способ зачистки осевых каналов роторов турбин и устройство для его осуществления | 1990 |
|
SU1784448A1 |
| ПРИВОД ШПИНДЕЛЯ ХОНИНГОВАЛЬНОГО СТАНКА | 1970 |
|
SU288587A1 |
| Механизм разжима брусков хонинговального станка | 2015 |
|
RU2617186C2 |
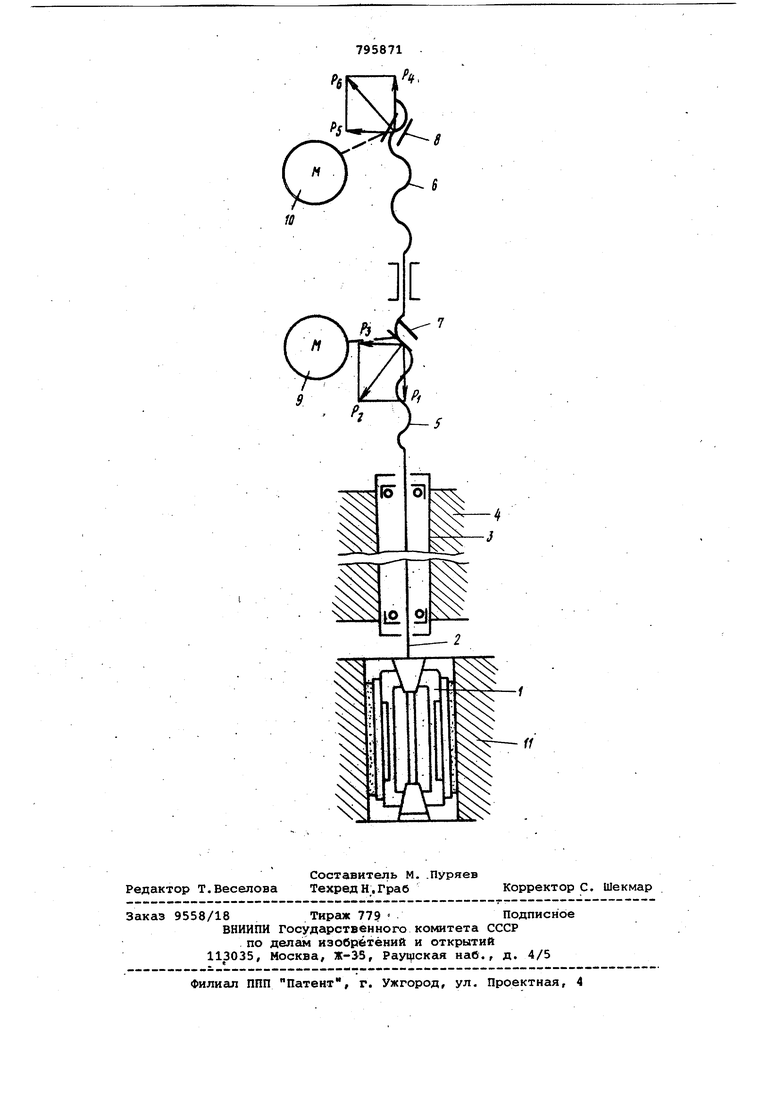
Изобретение относится к станкостроению, в частности к приводам станков для финишной обработки. Известны приводы хонинговалышх станков, содержащие двигатель и ки.нематические цепи вращательного и по ступательного движений. Наличие двух кинематических цепей составляющих дв жения формообразования усложняет кон струкцию и-эксплуатацию привода Ij Цель изобретения - упрснцение конструкции и эксплуатации. Указанная цель достигается гем, что он снабжен вторьм двигателем, -а роторы обоих двигателей соединены со шпинделем несамотормозящими винтовыми передачами, имекякими противоп ржное направление винтовых линий На чертеже изображена схема привода.. Привод содержит хонйнровгшьную головку 1, шпиндель 2, пиноль 3 установленную в корпусе 4, винты 5 и 6, гайки 7 и 8, двигатели 9 и 10. Хонинговальная головка 1 закреплена на шпинделе 2. Шпиндель установ лен на подшипниках в пиноли 3, которая расположена в корпусе 4. На шпинделе нарезаны винты 5 и б несам гормозящих винтовых передач противо положного направления винтовых канавок. Гайки 7 и 8 винтовых передач соединены с роторами двигателей 9 и 10, например постоянного тока. Питание двигателей 9 и 10 осуществляется от регулируемого источника, не показанного на схеме. Управление циклом осуществляется путевой автоматикой {на чертеже не показана). В крайних положениях хонинговальной головки 1 с коиечников происходит переключение частот вращения двигателей и реверсирование возвратно-поступательного движения пиноли. Система питания двигателей настраивается на получение заданных частот вращения гаек 7 и 8, KOTOiMje в соответствии с выбранныкш параметрами винтовыц передач обеспечивают заданные параметры движения формообразования. В процессе обработки детали 11 путевая автоматика переключает двигатели 9 и 10 на одну из двух фиксированных частот вращения, что определяет сксфость рабочего вращения и поступательного.движения шпинделя 2. Выключенный на заданную частоту вращения двигатель 9 через несгилотормозящую винтовую пару 5-7 сообщает
рабочее вращение шпинделю 2. Одновременно в винтовой передаче возникает осевая движущая сила Р, стремящаяся перемывать шпиндель 2 в осевом направлении. В это время двигатель 10 включен на другую частоту вращения, совпадакхцую с двигателем 9 по направлению, но с меньшей угловой скоростью Вращение двигателей 9 и 10 с равной угловой скоростью ддноэиачно опреде1ляет скорость поступательного движения шпинделя в направлении действия движущей силы Р,. в крайнем положении пиноли 3 происходит переключение двигателей 9 и 10. Двигатели меняются частотами Ёргицения. В результате в винтовой паре 6-8 возникает сила Р, которая перемещает шпиндель 2 в обратном направлении с той же скоростью поступательного движения и частотой вршцения. После возвращения пиноли 3 в исходное положение путевая автоматика повторяет цикл работы станка.
Простота конструкции и эксплуатации предлагаемого, привода обуславливают возможность его широкого применения в крупносерийном производстве, например автотракторной прбмьлипенности
формула изобретения
Приводу например хонинговапьного станка, содержащий двигатель и кинематические цепи вращательного и поступательного движений шпинделя, отличающийся тем, что, с целью упрощения конструкции, он снабжен вторым двигателем, а роторы обоих двигателей соединены со шпинделем несамотормозящими винтовыми передачами, имеющими противоположное направление винтовых линий.
Источники информации, принятые во внимание при экспертизе
