Изобретение относится к электротехнике и может быть использовано в высокоточных автоматизированных электроприводах постоянного тока.
Цель изобретения - повышение точности стабилизации скорости.
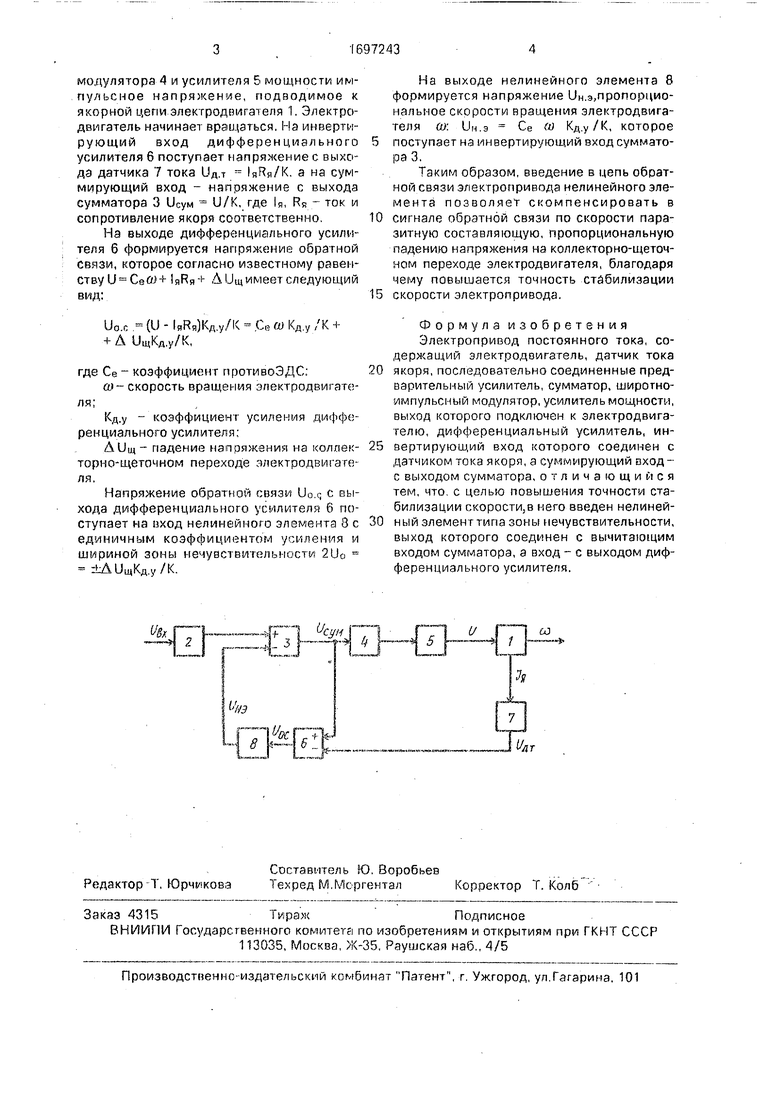
На чертеже приведена схема электропривода постоянного тока.
Электропривод содержит электродвигатель 1, последовательно соединенные предварительный усилитель 2, сумматор 3, широтно-импульсный модулятор 4, усилитель 5 мощности, выход которого подключен к электродвигателю 1, дифференциальный усилитель 6, инвертирующий вход которого соединен с датчиком 7 тока, а суммирующий вход - с выходом сумматора 3. Выход нелинейного элемента 8 типа зоны нечувствительности соединен с вычитающим входом
сумматора 3, а вход - с выходом дифференциального усилителя 6. Нелинейный элемент 8 может быть реализован при помощи операционного усилителя и диодных ограничителей
Электропривод работает следующим образом.
При подаче входного напряжения через предварительный усилитель 2 на сумматор 3 на выходе последнего формируется напряжение исум U/К, где U - напряжение питания электродвигателя 1 (напряжение, подводимое к якорной цепи), К- коэффициент, величина которого равна отношению среднего значения импульсного напряжения, подводимого к якорной цепи электродвигателя, к значению выходного напряжения сумматор.)
Выходное напряжение сумматора оор- мируют с помощью широтно-импульсного
О
модулятора 4 и усилителя 5 мощности импульсное напряжение, подводимое к якорной цепи электродвигателя 1. Электродвигатель начинает вращаться. На инвертирующий вход дифференциального усилителя 6 поступает напряжение с выхода датчика 7 тока ид.т 1яНя/К, а на суммирующий вход - напряжение с выхода сумматора 3 1)Сум U/K, где я, Кя - ток и сопротивление якоря соответственно.
На выходе дифференциального усилителя 6 формируется напряжение обратной связи, которое согласно известному равенству U CeW+ laRfl+ А 1)щ имеет следующий вид:
Uo.c (и-1яНя)Кд.у/К + Д ищКд.у/К,
СеО КДу/К +
где Се - коэффициент противоЭДС;
ft. - скорость вращения электродвигателя;
Кд.у - коэффициент усиления дифференциального усилителя;
ДУщ - падение напряжения на коллек- торно-щеточном переходе электродвигателя,
Напряжение обратной связи Uo.q с выхода дифференциального усилителя б поступает на вход нелинейного элемента 8 с единичным коэффициентом усиления и шириной зоны нечувствительности 2Uo
- ±дищкд.у/к.
На выходе нелинейного элемента 8 формируется напряжение 1)н.э,пропорциональное скорости вращения электродвигателя ш: ин.э Се ш Кд.у/К, которое
поступает на инвертирующий вход сумматора 3.
Таким образом, введение в цепь обратной связи электропривода нелинейного элемента позволяет скомпенсировать в
сигнале обратной связи по скорости паразитную составляющую, пропорциональную падению напряжения на коллекторно-щеточ- ном переходе электродвигателя, благодаря чему повышается точность стабилизации
скорости электропривода.
Формула изобретения Электропривод постоянного тока, содержащий электродвигатель, датчик тока
якоря, последовательно Соединенные предварительный усилитель, сумматор, широтно- импульсный модулятор, усилитель мощности, выход которого подключен к электродвигателю, дифференциальный усилитель, инвертирующий вход которого соединен с датчиком тока якоря, а суммирующий вход - с выходом сумматора, отличающийся тем, что, с целью повышения точности стабилизации скорости,в него введен нелинейный элемент типа зоны нечувствительности, выход которого соединен с вычитающим входом сумматора, а вход - с выходом дифференциального усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1986 |
|
SU1403316A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2157327C1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2068614C1 |
| Устройство для управления вентильным электродвигателем | 1987 |
|
SU1443113A1 |
| Цифровой электропривод | 1986 |
|
SU1390759A1 |
| Электропривод постоянного тока | 1979 |
|
SU917291A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
Изобретение относится к электротехнике и может быть испопьзовано в высокоточных автоматизированных электроприводах постоянного тока. Цель изобретения-повышение точности стабилизации скорости. Электропривод постоянного тока содержит электродвигатель 1, последовательно соединенные предварительный усилитель 2, сумматор 3, широтно-импульсный модулятор 4, усилитель 5мощности, выход которого подключен к электродвигателю 1, дифференциальный усилитель 6, инвертирующий вход которого соединен с датчиком 7 тока, а суммирующий вход - с выходом сумматора 3 вычитающий вход которого соединен через нелинейный элементе с выходом дифференциального усилителя. Введение в цепь обратной связи электропривода нелинейного элемента 8 позволяет скомпенсировать влияние падения напряжения на коллекторно-щеточном переходе электродвигателя и тем самым повысить точность стабилизации скорости. 1 ил. СЛ С
%
V,
ос
в:
ъ
| Электропривод постоянного тока | 1981 |
|
SU972643A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
