ve
00
00
Изобретение относится к электротехнике и может быть использовано в высокоточных автоматизированных электроприводах постоянного тока с неста- билизированными источниками питания силовых цепей.
Цель изобретения - повьшение точности стабилизации скорости.
На чертеже приведена схема электро привода постоянного тока.
Электропривод постоянного тока содержит электродвигатель 1, последовательно соединеннные предварительный усилитель 2, сз мматор 3, широтно-им- пульсный модулятор 4, усилитель мощности 5, выход которого подключен к электродвигателю 1, дифференциальный усилитель 6, выход которого соединен с вычитающим входом сумматора 3, а инвертирующий вход - с датчиком тока 7,
Первьш вход блока умножения 8 соединен с выходом сумматора, а выход - с суммиррующим входом дифференциаль- ноге усилителя 6. Второй вход блока умножения соединен с выходом делителя напряжения 9, подключенного к источнику питания усилителя мощности 5.
Электропривод работает следующим образом.
При подаче входного напряжения через предварительный усилитель 2 на ; сумматор 3 на выходе последнего фор- мируется напряжение си/л где I Uj, - напряжение на обмотке якоря эле- iктродвигателя 1; К - коэффициент, ве- ;личина которого равна отношению среднего значения импульсного напряжения на обмотке якоря электродвигателя к значению выходного напряжения сумматора.
Выходное напряжение сумматора формирует с помощью широтно-импульсного модулятора 4 и усилителя мощности 5 импульсное напряжение, подаваемое на обмотку якоря электродвигателя 1. Электродвигатель 1 начинает вращаться
Одновременно выходное напряжение сумматора 3 поступает на первый вход блока умножения 8, а на его второй вход поступает напряжение UдeJ с выхода делителя 9, равное Unrtr где Кде - коэффициент передачи делителя; ип„т напряжение питания усилителя мощности.
На выходе блока умножения 8 формируется напряжение которое определяется выражением и BV Kg Uc,
где К - коэффициент передаа умножения 8.
выборе Кдед из условия
1
К
Дел
f)
и
ЙОМ
пит
5
О
. Q
с
0
5
и при номинальном значении напряжения питания усилителя мощности 5 выходное напряжение блока умножения 8 будет равно выходному напряжению сумматора 3, т.е. Ugy и,„ ..
Это напряжение поступает на неинвертирующий вход дифференциального усилителя 6, а на его инвертирующий вход поступает напряжение с выхода датчика тока 7, равное Цд , где Ij,, RJ, - ток и сопротивление якоря соответственно.
На вьргоде дифференциального уснли-, |Теля 6 формируется напряжение обрат-, ной связи пропорхщонально скорости вращения электродвигателя
и,, (и/- 1яК,)Кд,,/К ,(/К,
где Cg - коэффициент противоЭДС электродвигателя 1; Кду - коэффициент усиления дифференциального усилителя 6.
При отклонениях напряжения питания усилителя мощности 5 от своего номинального значения происходит изменение среднего значения импульсного напряжения якорной обмотки, однако пропорционально этому изменению изменяется и выходное напряжение Ugj блока умножения 8.
Таким образом, введение резистор- ного делителя напряжения и блока умножения позволяет обеспечить однозначную зависимость между выходным напряжением блока умножения 8, поступающим на неинвертирующий вход дифференциального усилителя 6, и средним значением импульсного напряжения якорной обмотки, благодаря чему обеспечивается высокая точность стабилизации скорости вращения электродвигателя.
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель,, датчик тока якоря, последовательно соединенные предварительный усилитель, сумматор, широтно-импульсный модулятор, усилитель мощности с источником питания,
J1403316
выход которого подключен с электро- ный делитель напряжения и блок умно- двигателю, дифференциальный усилитель, жения, первый вход которого соединен выход которого соединен с вычитанщим с выходом сумматора, второй вход бло- входом сумматора, а инвертирующий д ка умножения соединен с выходом дели- вход - с датчиком тока якоря, о т л и- теля напряжения, подключенного к ис- чающийся тем, что, с целью по- точнику питания усилителя мощности, вышения точности стабилизации скорое- а выход - с суммиругацим входом дифференциального усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1989 |
|
SU1697243A1 |
| Цифровой электропривод постоянного тока | 1989 |
|
SU1644347A1 |
| Цифровой электропривод постоянного тока | 1986 |
|
SU1399880A1 |
| Электропривод постоянного тока | 1983 |
|
SU1121764A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| Электропривод | 1978 |
|
SU782109A1 |
| Электропривод постоянного тока | 1990 |
|
SU1737693A1 |
| Привод наведения | 2021 |
|
RU2767023C1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Реверсивный электропривод постоянного тока | 1979 |
|
SU936322A2 |
Изобретение относится к электро технике и м.б. использовано в высокоточных автоматизированных электроприводах постоянного тока с нестабипизи- рованными источниками питания силовых цепей. Цель изобретения - повмпение точности стабилизации скорости. Электропривод содержит электродвигатель 1, последовательно соединеннные предварительный усилитель 2, сумматор 3, широтно-испульсньй модулятор 4, .усилитель 5 мощности, выход к-рого подкшо- чен к электродвигателю, датчик 7 тока и дифференциальный усилитель 6. Обратная связь по скорости вращения электродвигателя реализуется путем алгебраического суммирования во входной цепи дифференциального усилителя 6 напряжения, пропорционального току якоря, и выходного напряжения блока 8 умножения, на один из входов к-рого поступает выходное напряжение сумматора 3, а на второй - напряжение питания усилителя 5 мощности через ре- зисторньй делитель 9 напряжения. Благодаря введению в электропривод блока 8 умножения и резисторного делителя 9 обеспечивается однозначная зависимость между среднюю значением якорного напряжения и выходньм напряжением блока 8 умножения при отклонениях напряжения источника питания усилителя мощности от своего номинального значения. 1 ил. i (Л С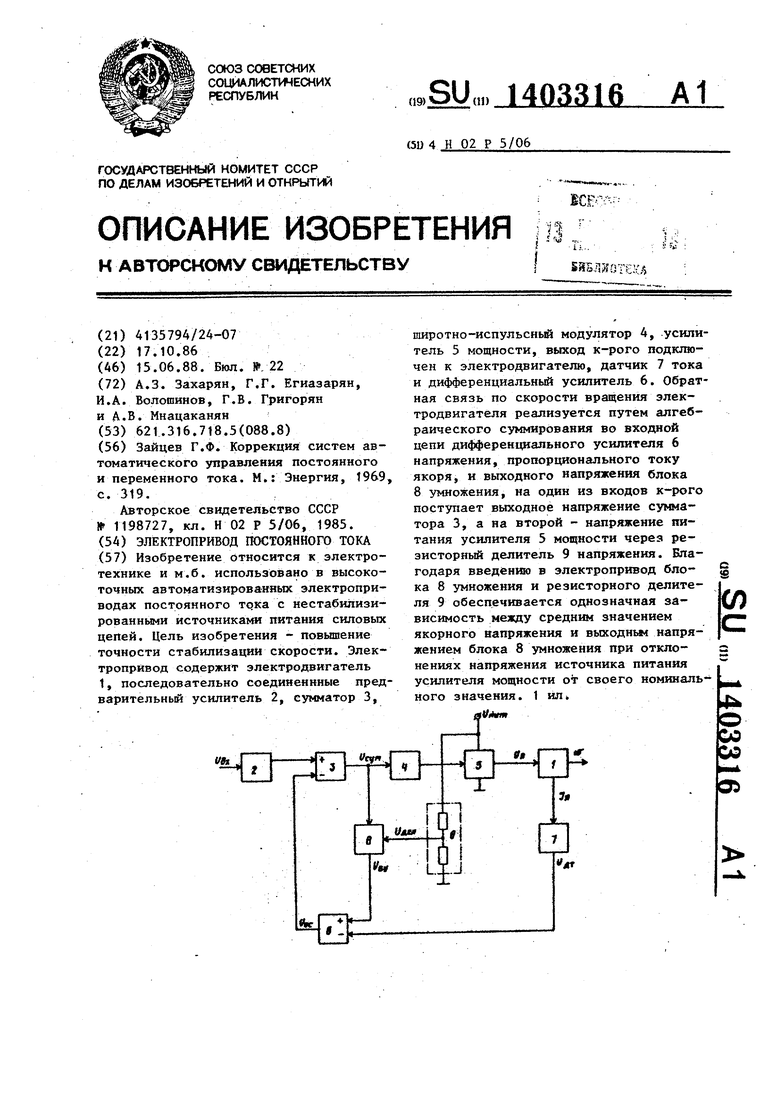
| Зайцев Г.Ф | |||
| Коррекция систем автоматического управления постоянного и переменного тока | |||
| М.: Энергия, 1969, с | |||
| Прибор для определения при помощи радиосигналов местоположения движущегося предмета | 1921 |
|
SU319A1 |
| Авторское свидетельство СССР № 1198727, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
