(21)4169831/24-07
(22)27.08.86
(46) 07.04.88. Бюл. .№ 13
(71)Кировоградское специальное конструк- торско-технологическое бюро Производственного объединения «Пишмаш
(72)В. И. Самохвалов
(53)621.313.525(088.8)
(56)Чиликин М. Г. и др. Дискретный электропривод с шаговыми двигателями.- М.: Энергия, 1971, с. 572.
Там же, с. 575.
(54)УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕЛИЧИНЫ ШАГА И СТАТИЧЕСКОЙ ПОГРЕШНОСТИ ОТРАБОТКИ ШАГА
(57)Изобретение относится к области электротехники и может быть использовано в электромеханических устройствах технологического оборудования, содержащего шаговые двигатели. Цель изобретения состоит в
повышении точности измерений величины шага и статической погрешности отработки шага. Устройство состоит из блока 1 управления, электрически соединенного с исполнительным шаговым двигателем 2, с проверяемым шаговым двигателем 3 и со считывающим устройством 4, редуктора 5, муфты 6. Вначале фиксируется исходное положение ротора проверяемого шагового двигателя, затем на его обмотки подается один или несколько импульсов, после чего импульсы подаются на исполнительный шаговый двигатель, вращающий статор проверяемого двигателя. Подача этих импульсов прерывается после возврата ротора в исходное Положение, а число импульсов подсчитывается. Благодаря наличию редуктора число этих импульсов больше, чем число импульсов, поданных на проверяемый шаговый двигатель. 1 ил.
i
(Л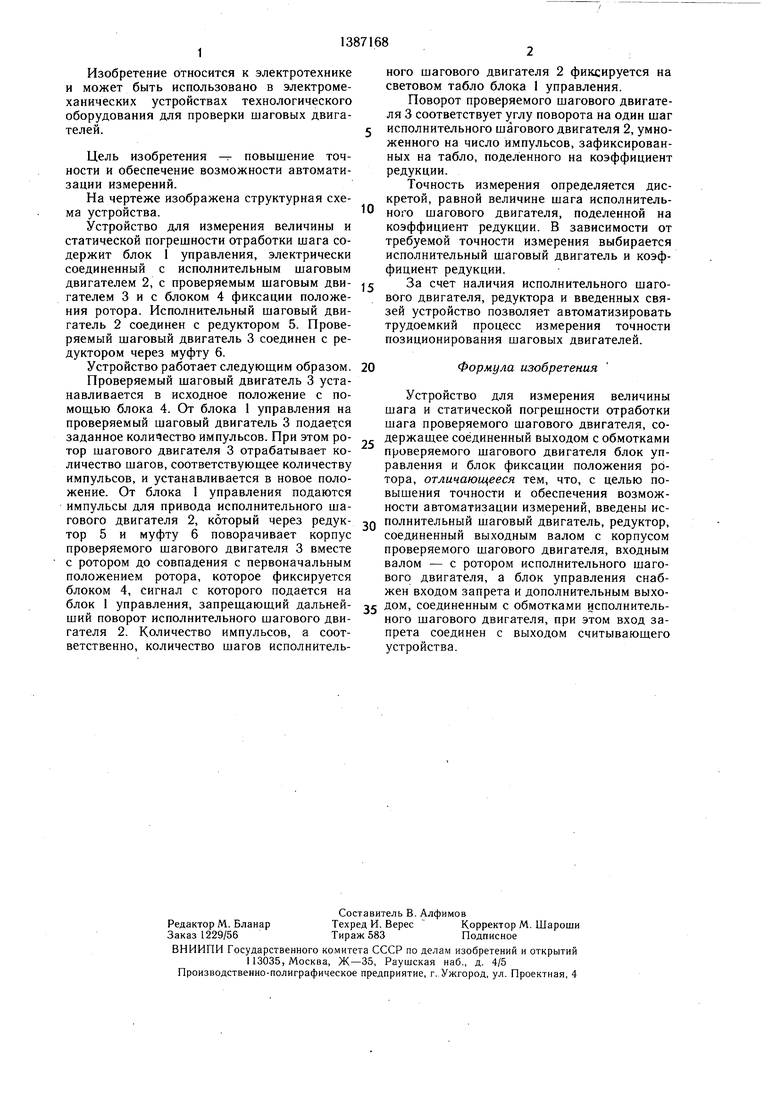
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |
| Следящая система | 1979 |
|
SU842705A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1986 |
|
SU1372582A1 |
| Устройство для контроля шаговых двигателей | 1973 |
|
SU523392A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1436265A2 |
| Способ измерения магнитного склонения и устройство для его осуществления | 1986 |
|
SU1343372A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1989 |
|
SU1679595A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПОГРЕШНОСТИ ОТРАБОТКИ ШАГА ШАГОВЫМ ДВИГАТЕЛЕМ | 1970 |
|
SU288508A1 |
| Устройство для контроля погрешности отработки шага шагового двигателя | 1989 |
|
SU1702509A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |

со
00
О5 ОС
10
Изобретение относится к электротехнике и может быть использовано в электромеханических устройствах технологического оборудования для проверки шаговых двигателей.
Цель изобретения - повышение точности и обеспечение возможности автоматизации измерений.
На чертеже изображена структурная схема устройства.
Устройство для измерения величины и статической погрешности отработки шага содержит блок 1 управления, электрически соединенный с исполнительным шаговым двигателем 2, с проверяемым шаговым дви- гателем 3 и с блоком 4 фиксации положения ротора. Исполнительный шаговый двигатель 2 соединен с редуктором 5. Проверяемый шаговый двигатель 3 соединен с редуктором через муфту 6.
Устройство работает следуюшим образом. 20
Проверяемый шаговый двигатель 3 устанавливается в исходное положение с по- мошью блока 4. От блока 1 управления на проверяемый шаговый двигатель 3 подается
ного шагового двигателя 2 фиксируется на световом табло блока 1 управления.
Поворот проверяемого шагового двигателя 3 соответствует углу поворота на один шаг исполнительного шагового двигателя 2, умноженного на число импульсов, зафиксированных на табло, поделенного на коэффициент редукции.
Точность измерения определяется дис- кретой, равной величине шага исполнительного шагового двигателя, поделенной на коэффициент редукции. В зависимости от требуемой точности измерения выбирается исполнительный шаговый двигатель и коэффициент редукции.
За счет наличия исполнительного шагового двигателя, редуктора и введенных связей устройство позволяет автоматизировать трудоемкий процесс измерения точности позиционирования шаговых двигателей.
Формула изобретения
Устройство для измерения величины шага и статической погрешности отработки шага проверяемого шагового двигателя, созаданное количество импульсов. При этом ро- держащее соединенный выходом с обмотками
тор шагового двигателя 3 отрабатывает количество шагов, соответствующее количеству импульсов, и устанавливается в новое положение. От блока 1 управления подаются импульсы для привода исполнительного шапроверяемого шагового двигателя блок управления и блок фиксации положения ротора, отличающееся тем, что, с целью повышения точности и обеспечения возможности автоматизации измерений, введены исгового двигателя 2, который через редук- .JQ полнительный шаговый двигатель, редуктор.
тор 5 и муфту 6 поворачивает корпус проверяемого шагового двигателя 3 вместе с ротором до совпадения с первоначальным положением ротора, которое фиксируется блоком 4, сигнал с которого подается на
соединенный выходным валом с корпусом проверяемого шагового двигателя, входным валом - с ротором исполнительного шагового двигателя, а блок управления снабжен входом запрета и дополнительным выхоблок 1 управления, запрещающий дальней- дом, соединенным с обмотками исполнительший поворот исполнительного шагового дви-ного шагового двигателя, при этом вход загателя 2. Количество импульсов, а соот-прета соединен с выходом считывающего
ветственно, количество шагов исполнитель-устройства.
ного шагового двигателя 2 фиксируется на световом табло блока 1 управления.
Поворот проверяемого шагового двигателя 3 соответствует углу поворота на один шаг исполнительного шагового двигателя 2, умноженного на число импульсов, зафиксированных на табло, поделенного на коэффициент редукции.
Точность измерения определяется дис- кретой, равной величине шага исполнительного шагового двигателя, поделенной на коэффициент редукции. В зависимости от требуемой точности измерения выбирается исполнительный шаговый двигатель и коэффициент редукции.
За счет наличия исполнительного шагового двигателя, редуктора и введенных связей устройство позволяет автоматизировать трудоемкий процесс измерения точности позиционирования шаговых двигателей.
Формула изобретения
Устройство для измерения величины шага и статической погрешности отработки шага проверяемого шагового двигателя, содержащее соединенный выходом с обмотками
проверяемого шагового двигателя блок управления и блок фиксации положения ротора, отличающееся тем, что, с целью повышения точности и обеспечения возможности автоматизации измерений, введены исполнительный шаговый двигатель, редуктор.
соединенный выходным валом с корпусом проверяемого шагового двигателя, входным валом - с ротором исполнительного шагового двигателя, а блок управления снабжен входом запрета и дополнительным выходом, соединенным с обмотками исполнитель
