Изобретение относится к телевизионной (ТВ) технике и может быть использовано три разработке телевизионных автоматизированных систем наблюдения и управления дорожным движением для измерения скорости движения транспортных средств (ТС).
Цель изобретения - повышение помехозащищенности.
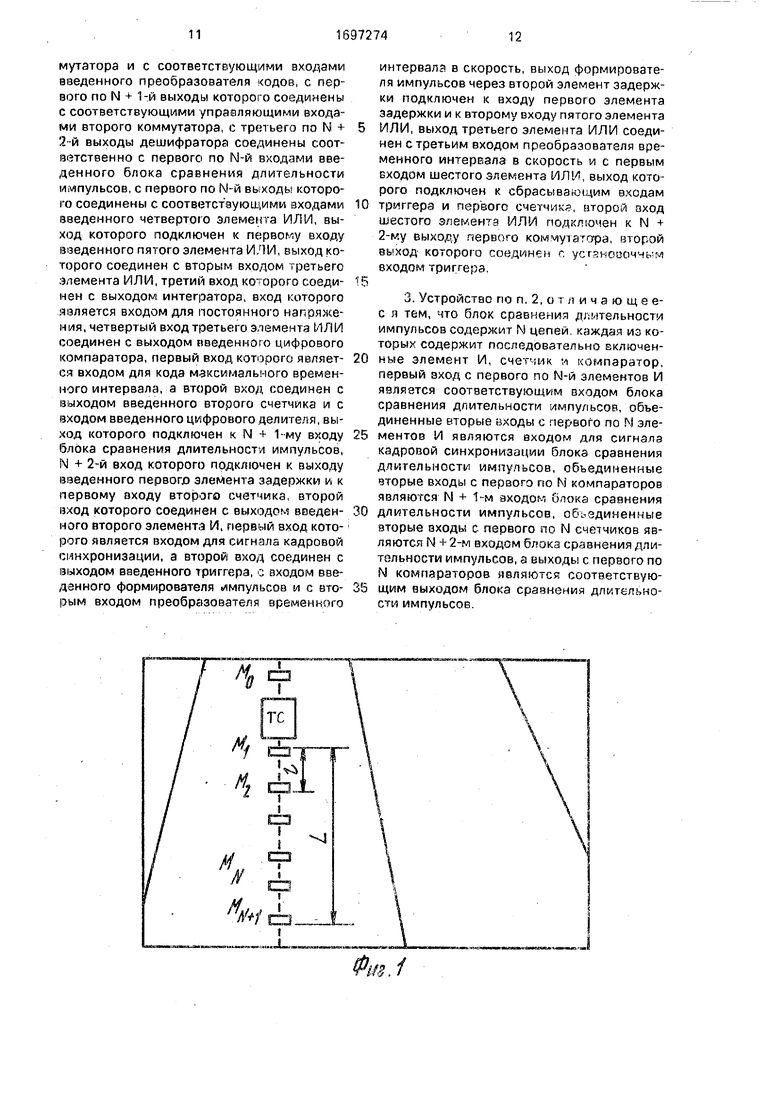
На фиг. 1 представлено ТВ-изображение формируемых меток и контролируемого
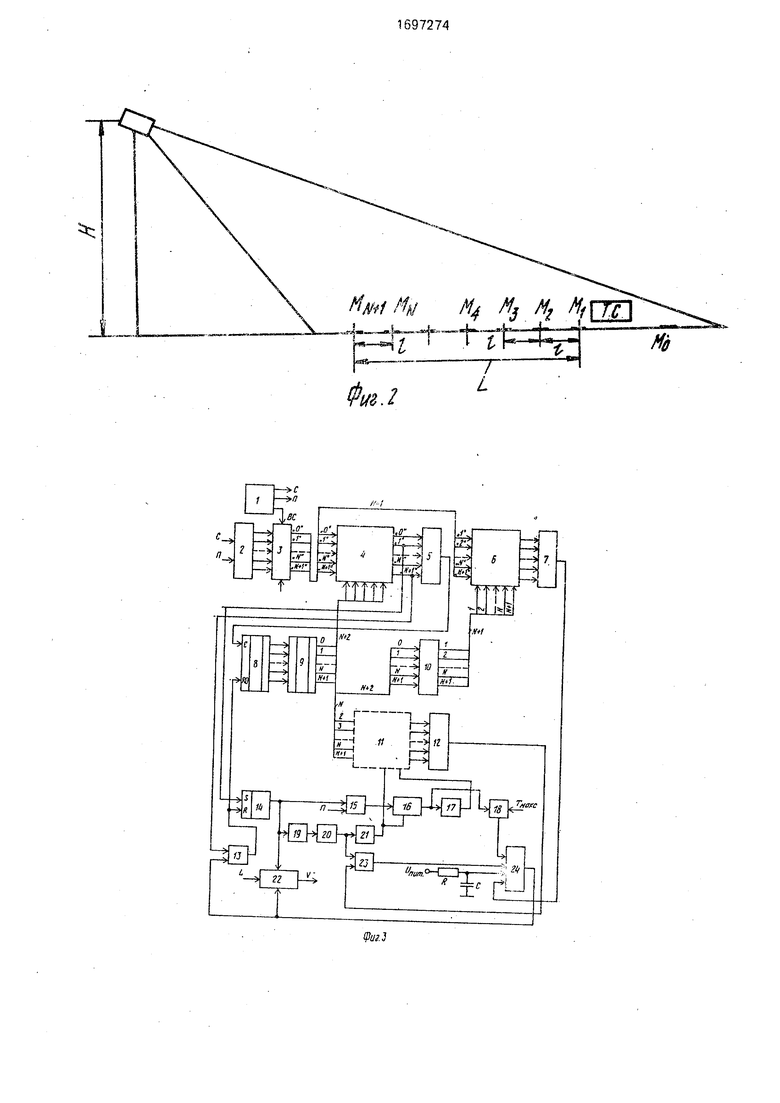
участка дороги с транспортным средством; на фиг. 2 - схема расположения датчика ТВ-сигнала относительно транспортного средства и онтролируемого участка дороги; на фиг. - структурная электрическая схема устройства для измерения скорости движения транспортных средств; на фиг. 4 - структурная электрическая схема блока сравнения длительности импульсов.
Устройство для измерения скорости движения транспортных средств содержит (фиг. 3) датчик 1 ТВ сигнала, генератор 2 стробирующих импульсов, блок 3 выделения межкадровой разности, первый коммутатор 4, первый элемент ИЛИ 5, второй коммутатор 6, второй элемента ИЛИ 7, первый счетчик 8, дешифратор 9, преобразователь 10 кодов, блок 11 сравнения длительности импульсов, третий элемент ИЛИ 12, четвертый элемент ИЛИ 13, триггер 14, первый элемент И 15, второй счетчик 16, цифровой делитель 17, цифровой компаратор 18, формирователь 19 импульсов, первый элемент20задержки, второй элемент 21 задержки, преобразователь 22 временного интервала в скорость, второй элемент И 23 и пятый элемент ИЛИ 24.
Блок 11 сравнения длительности импульсов (фиг.4)содержит N элементов И 25 блока сравнения, N счетчиков 26 блока сравнения и N компараторов 27 блока сравнения.
При включении зеленой фазы светофора практически одновременно начинает двигаться поток ТС без разрывов, при этом возможно продвижение меток не одним ТС, а сразу несколькими (по эстафете), что приводит к значительным ошибкам в измерении скорости, К ошибкам измерения может привести также то, что транспортный поток состоит из ТС, имеющих значительный разброс в геометрических размерах (автомобиль с прицепом, различные автофургоны и автомобили спецназначения).
Для исключения этих ошибок измерения необходимо, чтобы продвижение метки передним краем движущегося ТС обеспечивалось при условии, что непосредственно перед ним, в участках изображения, строби- руемых последующими метками, нет другого движущегося ТС. Измерение скорости заключается в том, что выбирают мерный участок L, длина которого обеспечивает, например, 10% точность от измеряемой величины скорости (фиг. 1 и 2). Делят мерный участок на N мерных участков одинаковой длины I, которая соизмерима с длиной ТС. Перед указанным мерным участком выбирают контрольный участок, длина которого равна максимальной длине ТС. Формируют стробирующие импульсы меток одновременно в каждом ТВ поле в начале и в конце каждого мерного отрезка, включая начало контрольного участка. Формируют сигнал наличия движения раздельно и одновременно для каждого из N+2-х участков изображения, стробируемых соответствующими строби- рующими импульсами меток. Разрешают формирование (N + 2)-х сигналов наличия движения от метки Мо до метки MN+I последовательно на всех метках только а том случае, если, например, при последовательном анализе сигналов в метках М и Mi+i отсутствует сигнал наличия движения на участках изображения, соответствующих меткам
MI+I и Мн-2. В противном случае осуществляют возврат в исходное состояние. Время проезда ТС мерного участка определяют, как временной интервал между появлением сигнала наличия движения на участке изо0 бражения, стробируемого меткой Mi, и появлением сигнала наличия движения на участке изображения стробируемого меткой MN+I, в случае, если не было возврата в исходное состояние во йсем цикле измере5 ния, Для блокировки возможного ложного формирования сигнала временного интервала транспортным средством большой длины (автофургон, автобус и т.д.) запоминают время проезда транспортным средст0 вом каждого отдельного мерного участка равной длины и затем сравнивают эти отдельные временные интервалы с временным интервалом То T/n -N, где Т - время проезда транспортным сред5 ством всего мерного участка;
N - число мерных участков равной длины в сумме равных длине всего мерного участка;
п - кратность возможного превышения ,
0 скорости транспортным средством на мерном участке по сравнению со средней скоростью транспортного средства, измеренной относительно всего мерного участка.
В случае, если Tj То, результат измере5 ния скорости в данном цикле измерений аннулируют, так как в пределах отдельного малого мерного участка невозможно быстрое скачкообразное изменение скорости ТС, имеющего большую массу.
0 Устройство, реализующее способ изме-- рения скорости движения ТС, работает следующим образом.
Видеосигнал сдатчика 1 ТВ сигнала поступает на вход блока 3 выделения межкад5 ровой разности, в каждом из N + 2 каналов которого формируется сигнал межкадровой разности отдельно для каждого участка изображения, стробируемого соответственно N + 2 стробирующими импульсами генера0 тора 2 стробирующих импульсов, которые поступают на другие входы блока 3 выделения межкадровой разности.
Таким образом, на выходах блока 3 выделения межкадровой разности отдельно для каждого стробируемого участка изобра- жения, в случае, если межкадровая разность для этого участка изображения по модулю не равна 0, присутствует импульсный сигнал наличия движения с задержкой относительно соответствующего стробирующего импульса текущего ТВ поля. Выходы блока 3 соединены с соответствующими входами первого коммутатора 4 на N + 2 входа и выхода, причем благодаря управлению первым коммутатором А цифровым кодом с выхода дешифратора 9. на вход которого пооупает цифровой код с выхода первого счетчика 8 с кратностью деления N + 2, обеспечивазтся комму|ация только одного АЗ канрг.оа на соответствующий этому каналу выхоЈ Коммутация происходит последе- (ьно во ср-длени от 0 до (N + 1)-го входа.
Счетные импульсы для первого счетчика 8 с кратностью деления N + 2 югся путем объединения первым элемен шм ИЛИ 5 всех (N + 2)-х выходов первого коммутатора 4 и поступают на счетный вход первого счетчика 8.
Управление вторым коммутатором б осуществляется цифровым кодом с выхода преобразователя 10 кодов на вход которого поступает цифровой код с дешифратора 9. Преобразователь 10 осуществляет лреобра- зование цифрового кода, например, путем умножения выходного кода дешифратора 3 на 3. Так как выходной код дешифратора 9 всегда логическая 1 в одном из рэзрядсв и в остальных разрядах логический О 1, то умножение этого двоичного числа с потенциалом логической 1 в N1 разряде на три приводит к появлению в выходном коде преобразователя 10 кодов логической 1 в NI и NM разрядах, а в остальных разрядах будет присутствовать потенциал логического О. Таким образом на выход второго коммутатора 6 могут поступать одновременно только два входных I и i f 1 сигнала наличия движения. Так как во втором коммутаторе 6 на один канал меньше (сигнал наличия движения на участке изображения стробируемо- го меткой Мо на вход второго коммутатора 6 не поступает) и на первый канал этого коммутатора поступает сигнал наличия движения участка изображения стробируемого меткой Mi, а на остальные выходы сигналы в этой же последовательности, то этим достигается коммутация на выходе второго коммутатора 6 сигналов от меток MJ-H и Мн-2 в случае, если на выход первого коммутатора 4 поступает сигнал от метки Mi. Выходы второго коммутатора 6 объединены элементом ИЛИ 7. Выходной импульсный сигнал с выхода элемента ИЛИ 7 через пятый элемент ИЛИ 24 устанавливает в исходное состояние преобразователь 22 временного интервала в скорость, триггер 14 и первый счетчик 8 с кратностью деления N + 2 (через четвертый элемент ИЛИ 13).
Выходные сигналы (i + 1)-го, (i + 2)-го канала второго коммутатора 6 являются
всегда сторожевыми по отношению к сиг- нулу 1-го канала первого коммутатора 4. По- следовательная коммутация каналов первого коммутатора 4 первым счетчиком 8 возможна только в случае, если появление сигнала на участке изображения стробируемого меткой происходит при отсутствии а то же время сигналов наличия движения в уча0 стках изображения стробируемых метками Win, Mi+2. Згим исключается эстафетное переключение каналов первого коммутатора 4 впереди движущимися ТС при малой дис- танц- между ими (ситуация вблчзн регу5 лируемого перекрестка и т.п.). Выходной сигнал 1-гс канала коммутатора устанавливает триг-ер 14 пи входу S в состояние логической 1. s выходной слгнал последнего ( -t 1)-го канала первого коммутатора
0 4 оозвозщаег, черсс четзертьн;; злемег ИЛИ 13 14 з состояний логического О (по входу R) и подтверждает состояние логического О по всем выходам первого сиетчикг. 8. Сформированный на выходе
5 триггера 13 импульс, длительностью равной времени проезда меэногоучастка длиною L, поступает на вход преобразователя 22 аре- M i rEcro интерн зла в скорость. На этом цикл измерения зкорэст;. глзнчи&э-тгся. переый
0 коммутатср 4 гзход -ся в таком состоянии, когда го лерзому его каналу мижет поступать сигнал наличия движения на участие изображения, стробируемого мелкой MO. a второй коммутатор б находится в состоянии,
5 когда по первым двум каналам его могут поступать на его выходы сигналы наличия движения от участков изображения, стробируемых соответственно метками Mi и М.. Наличие в транспортном потоке ТС шой длины, имеющих однородную поверхность (автомобиль с прицепом, автобус с плоской крышей при рассеянном, не контрастном освещении) может приводить к тому, что сигнал наличия движения в стороже5 вых метках Мн-1, Мц-2 может не сформироваться, что также приведет к ложному быстрому переключению каналов первого коммутатора 4 изображением движущейся поверхности кузова ТС. Для исключения
0 этой погрешности, учитывая, что в реальных условиях быстрое изменение скорости ТС, имеющего значительную массу в пределах малого мерного отрезка, невозможно, в устройстве производится контроль неравно-5 мерног.ти ..зижения ТС путем сравнения временны.; интервалов проезда N мерных отрезков одинаковой длины i L/N, где L - ,ьл:;ча мерного участка; N - число мерных отрезков с временным интервалом; То Т/л -М, где N-число мерных отрезков; п -- допустимая кратность превышения
скорости на мерном отрезке средней скорости на всем мерном участке; Т - время проезда ТС мерного участка.
Этот контроль осуществляется следующим образом.
Учитывая, что время присутствия логической 1 на 1-ом выходе дешифратора 9 равно времени проезда ТС ()-го мерного отрезка, каждый импульс из выходов дешифратора 9, начиная со второго, поступает на отдельный вход блока 11 сравнения длительности импульсов, на один из входов первого элемента И 25 каждого канала, а на второй вход поступает импульс частоты полей. Импульсы частоты полей поступают на счетчик 26 канала в течение времени присутствия на входе элемента И 25 канала логической 1. Сформированный на выходе счетчика 26 цифровой код, равный числу импульсов полей прошедших через элемент И 25, поступает на один вход компаратора 27. Аналогично запоминаются длительности импульсов в остальных каналах блока 11 сравнения длительностей импульсов. Одновременно с началом запоминания длительности импульс в первом канале блока 11 сравнения длительности импульсов во втором счетчике 16 запоминается длительность интервала времени, в течение которого ТС проходит весь мерный участок, На счетный вход второго счетчика 16 через первый элемент И 15 поступают импульсы частоты полей. При этом на второй вход элемента И 15 поступает разрешающий потенциал с выхода триггера 14. Таким образом, к концу временного интервала, который формируется на выходе триггера 14, в счетчиках 26 каналов блока 11 сравнения длительности импульсов последовательно сформируются цифровые коды Ti длительностей, в течение которых ТС прошло отдельно каждый мерный отрезок, а во втором счетчике 16 цифровой код времени проезда ТС всего мерного участка. Выходной код второго счетчика 16 поступает на цифровой делитель 17, где осуществляется операция деления на величину rvN. Выходной код цифрового делителя 17 одновременно поступает на другие входы компараторов 17 блока сравнения. Если хотя бы в одном из каналов блока сравнения длительностей импульсов выполняется условие TI T/nN, на выходе третьего элемента ИЛИ 12 формируется потенциал логической 1, который поступит на один из входов второго элемента И 23. В. формирователе 19 импульсов выделяется и формируется импуйьс, совпадающий с задним фронтом импульса на выходе триггера 14. Этот импульс с выхода первого элемента 20 задержки поступает на второй вход второго
элемента И 23 и в случае, когда на первом входе второго элемента И 23 присутствует потенциал логической 1, на выходе второго элемента И 23 формируется короткий импульс, который через пятый элемент ИЛ И 24 устанавливает в исходное состояние преобразователь 22 временного интервала в скорость и подтверждает (через четвертый элемент ИЛИ 13) нулевое состояние тригге0 ра 14 и первого счетчика 8, Время дадержкл 1зад второго элемента 21 задержки выбирается из условия Гзад tB. где tB - вр,мя необходимое для выполнения операции деления в цифровом делителе 17. Импульс с
5 выхода второго элемента 21 задержки последовательно включенного с первым элементом 20 задержки устанавливает все счетчики 26 блока 11 сравнения длительностей импульсов и второй счетчик 16 в нулевое состоя0 ние.
Для ограничения минимальной скорости и блокировки этим ситуации, когда транспортное средство пересекло участок изображения, стробируемого меткой Mi (на5 чало мерного участка), а далее изменило траекторию движения так, что участки изображения (фиг. 1), стробируемые импульсами следующих меток Ма, Мз..., уже не могут быть ими пересечены, устройство содер0 жит цифровой компаратор 18 на один вход которого поступает цифровой код с выхода второго счетчика 16, а на другой вход поступает фиксированный код длительности « временного интервала Тмакс ,в течение ко5 торого транспортное средство проходит мерный участок с минимальной скоростью. Если текущее значение кода, зафиксированное во втором счетчике 16 больше, чем Тмакс, на выходе цифрового компара-.
0 тора 18 формируется потенциал логического О, который через пятый .элемент ИЛИ 24 производит установку устройства в исходное состояние.Установка устройства в исходное состояние при включении
5 питания производится нулевым потенциалом, с выхода RC цепи, который поступает на один из выходов -пятого элемента ИЛИ 24,
Использование способа измерения
0 скорости движения транспортных средств и устройства для его реализации позволит повысить точность и помехозащищенность измерений скорости, особенно при проведении этих измерений в плотном по5 токе транспортных средств, в условиях регулируемого перекрестка, при изменении ряда движения транспортным средством а также исключит влияние габаритных размеров транспортных средств из точность измерения скорости.
Формула изобретении 1 Способ измерения скорости движения транспортных сседств, заключающийся в том, что определяют длину мерного и смежного, расположенного- перед мерным, коь f участков трассы формируют видеосигнал изображения трансптртно.х s/едств, с он, т i его мерного у-нсткоч трассы сигнс1ль зи.аес- оигнг- изо 0 . iii ;пча/. i i-Trt ,iM го учрит «Vм о тицс. о уч..
ipacc i op vi.)V f |Х :зло орных рр t,. Ci г i SOT nerj, ч
ji ji-ct -,
i -i IV.ID -ia
олз i, . с с.ка грассь сгро f.i/юг видеоси ьо i ,ооражри тр-шсгт. ооедств, iOTjA-ibtor л у ст
ГЈ,ТТСЫ ОИГЧа/| МЛ fvicipM, OTfiJ Oo n V Ь
/и cvi PC ч с вилесСсгно- чаизображения ре.1 портных средств ко тролыюго п мерного участков сигнал наличия двихсння трянспортных cptflCi в на кaждo мер ом г/1 речке опое/,сляют вп меннок ин гервал Т межд у п 1гнало наличия движения транспортных средств от сигнала метки начала пгс участка сигнал вого мерного отрезке ,рассм до оигчс s «етки конц.з г срного i «JCTKP ,о мерно; о отрезка . -ссы и иоотво ствую t -о временному интервалу Т скорость дз., чЗ- ния транспортьых средств г,р(. сгяич1 и сигнала движения транспорт ми/ 1.р дств последовательно or сигнал ч первого р сиг нала i-ro мерного отрезки трассы с т л и чающийся тем, что с целью пое 1шения помехозащищечност , пои фоомиоовании N сигналов мерных отрет/Ос; fpgcxi между сигналами меток начала коьиа мерною участка, величину сиг ла каждое мерное отрезка формируют одинаковой и римой с величиной видросигнапа и-зобрг/ке- ния тракспортмы/ средств п гем срарненкя длительности ридеос |Г.. транспоргчи х средств и си1ЧсЫОЕ мер ь отраз.эв т эаь - сы, сигна/ ы мет и а кахдого мерного отрезка э1, чотгрольнн л vja- сток и сигналы алижя движения i-J зсех мерных отрезках Форм/ipy от одновременно с частотой формиролчния в ьосигня э 1 панспортных средств конгропьногс и мерного участкоз трассы л оаздел но для каждого lep.ioro отоезка, одновременно форчир чот сигнал запоета сигнала до 1женил транспоо- тных средств г оледовательно от сигнала пзпао о до сигнала IM-rj моркого отрезка тр, г ы i сигнал 8o Lpsia к огрсдрлению сигнала д ижинля ъ, первом мерном отрезке грасоы гри Ск утстзии сигнала дв лхбиия ju,Yt if- ме iiO на смежных метках, одьовр м0, с с из
стробированного видеосигнала изображения транспортных средств контрольного и мерного участков сигнала наличия движения транспортных средств на каждом мер ном отрезке запоминают длительность Ti наличия движения транспортных средств на 1рждом мерном отрезке и при Ti T/n N, где г - допустимая кратность превышения скгоости транспортным средством на отц г,оргом отоезке средней скорости на
СРП мерном участке, формируют CHI нал возв{ -та к определению наличия сигнала двир -t if мерном отрезке трассы
2 ас длл i 3P -эррни 1 скорости
,:гчж8н я рэ спортн j средств, содержа- ире датчик г( евча гниого сигнала, пер- L м и а.орзй с.1нхронизиоующие выходы wici-.oro РТЧРЮТСЯ ьыходо и сигналов соот л, ьс v Tpi ноД -1 одровой сиихронизгдн. Гси зотор стробирующих импульсоз перог и и входы котопого являнэтся д -f с гналор ч-остветственно строшой и кадровой синхронизации блок выделения мехкадровой разности синхрониз рующ| и вход которого является входом
для сигналоч« цровоЛги хрпкизации лерBL. и ONrMyTdTO}, и поообрагсвате :ь яремеппгс интервала в скорое, перчив
о эрого авляэ я sxoflo .v для сигнал длиг-ы мерпС участка, а выход - выходом устройства для из -прсния сксрост движений r$at спортч средств отличающееся тег, что им ис мационный выход датчика i1 i с-31 ион,(,о, з сиг-тла подключен к ичфоо
мационнсму вчоцу Олока выделения разности, с первого по N - 2-й входы которою соединены с ссответс вую ыиодами генератора стробирующмх , и1пут-,со& с первого по N + 2-й выходы
блока BL деления межкадровоь разности i э- с инены с первого по N -г 2-й информацион ныг и входами первого коммутатора, с пеивого по N г 2-й выходы которого соединен с соотьетстэующими входами введенного
перього элемента ИЛИ выход которого соедин с синхро- мзирующим входом введенного
IPOL з о .чртч.-1ка с второго по N - 2-й выхо
д1- илока в делечия межкадровой разности
со°дине о, соответственно с первого по N
1 информационными входами введенного pfoporo коммутатора с первого по N 1-й выходы когооого соединены с соответству ющим a-w введемного второго зле мента i/i аыход которого подключен к
55 пергом.
у третьего элемента ИЛИ раз
рядпые ьчсдп1 первого счетчика подклюиены к соствстстзующим разрядным входам ввг депно о дои . с первого по N 2-й выходы которо соединены с соотьетствую щ.iw yrf. твл входами первого ком
мутатора и с соответствующими входами введенного преобразователя кодов, с первого по N + 1-й выходы которого соединены с соответствующими управляющими входами второго коммутатора, с третьего по N + 2-й выходы дешифратора соединены соответственно с первого по N-й входами введенного блока сравнения длительности импульсов, с первого по N-й выходы которого соединены с соответствующими входами введенного четвертого элемента ИЛИ, выход которого подключен к первому входу введенного пятого элемента ИЛИ, выход которого соединен с вторым входом третьего элемента ИЛИ, третий вход которого соеди- нен с выходом интегратора, вход которого является входом для постоянного напряжения, четвертый вход третьего элемента ИЛИ соединен с выходом введенного цифрового компаратора, первый вход которого являет- ся входом для кода максимального временного интервала, а второй вход соединен с выходом введенного второго счетчика и с входом введенного цифрового делителя, выход которого подключен к N + 1-му входу блока сравнения длительности импульсов, N + 2-й вход которого подключен к выходу введенного первого элемента задержки и к первому входу второго счетчика, второй вход которого соединен с выходом введен- ного второго элемента И. первый вход которого является входом для сигнала кадровой синхронизации, а второй вход соединен с выходом введенного триггера, с входом введенного формирователя импульсов и с вто- рым входом преобразователя временного
интервала в скорость, выход формирователя импульсов через второй элемент задержки подключен к входу первого элемента задержки и к второму входу пятого элемента ИЛИ, выход третьего элемента ИЛИ соединен с третьим входом преобразователя временного интервала в скорость и с первым входом шестого элемента ИЛИ, выход которого подключен к сбрасывающим входам триггера и первого счетчикз, второй вход шестого элемента ИЛИ подключен к N + 2-му выходу первого коммутатора, второй выход которого соединен г. устэнооочнь-м входом триггера.
3. Устройство поп.2,отличающее- с я тем, что блок сравнения длительности импульсов содержит N цепей, каждая из которых содержит последовательно включенные элемент И, счетчик и компаратор, первый вход с первого по N-й элементов И является соответствующим входом блока сравнения длительности импульсов, объединенные вторые входы с первого по N элементов И являются входом для сигнапа кадровой синхронизации блока сравнения длительности импульсов, объединенные вторые входы с первого по N компараторов являются N + 1-м входом блока сравнения длительности импульсов, объединенные вторые входы с первого по N счетчиков являются N + 2-м входом блока сравнения длительности импульсов, а выходы с первого по N компараторов являются соответствующим выходом блока сравнения длительности импульсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости движения транспортных средств и устройство для его осуществления | 1986 |
|
SU1429342A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| Устройство для контроля движения транспортных средств | 1987 |
|
SU1538178A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1995 |
|
RU2096833C1 |
| Система для измерения скорости транспортного средства | 1991 |
|
SU1797712A3 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1994 |
|
RU2081232C1 |
| МОБИЛЬНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ КУЩЕНКО В.А. | 2010 |
|
RU2435226C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1994 |
|
RU2094853C1 |
| Устройство для автоматического контроля больших интегральных схем | 1986 |
|
SU1529220A1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |

Изобретение относится к телевизионной (ТВ) технике и может быть использовано при разработке телевизионных автоматизированных систем наблюдения и управления дорожным движением для измерения скорости движения транспортных средств. Цель изобретения - повышение помехозащищенности. Выбирают мерный участок, длина которого обеспечивает требуемую точность измерений скорости. Выбирают контрольный участок, находящийся непосредственно перед мерным, мерный участок делят на N мерных отрезков одинаковой длины, соизмеримой с длиной транспортного средства. Формируют сигналы меток одновременно для всех меток в начале и конце каждого меоного отрезка, включая начало контрольного участка, формируют одновременно для всех меток сигнал кзличмг движения раздельно и одновременно для каждого из N + 2 мерных участков. Видеосигнал с датчика ТВ сигнала i/гробируется в генераторе стробирующих импульсов и поступает на блек выделения межкадровой разности где формируются сигналы наличия движения транспортного средства, С помощью первого счетчика дешифратора и первого элемента ИЛИ первый коммутатор обеспечивает распределение сигналов с блока выделения межкадровой разности на соответствующие каналы. Преобразователь кодов с выхода дешифратора обеспечивает формирование сторожевых сигналов на выходе второго коммутатора, обеспечивающих исключение эстафетного переключения каналов первого коммутатора Выходной сигнал первого канала первого коммутатора устанавливает триггер в единичное состояние, а выходной сигнал последнего канала первого коммутатора - в нулевое состояние. Сформированный на выходе триггера импульс преобразуется преобразователем временного интервала в скорость. 2 с. и 1 з.п, ф-лы, 4 ил. I, г- О
Фм.2
М4 М5 fyty
i г i-
icW «-лфи-i-.
r p
L
ШгЧ
| Способ измерения скорости движения транспортных средств и устройство для его осуществления | 1986 |
|
SU1429342A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
