тэ-тм-.т.ттгетд ягу.г-. ; TV. Г ЗТ1 ГП:
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ статической балансировки изделия | 1988 |
|
SU1585697A1 |
| Опорное устройство телескопа | 1981 |
|
SU1032237A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА | 2014 |
|
RU2572218C9 |
| СПОСОБ СЛЕЖЕНИЯ ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА ЗА ПОДВИЖНЫМ ОБЪЕКТОМ | 2013 |
|
RU2546054C1 |
| Способ сборки подшипниковой опоры с предварительным натягом | 1985 |
|
SU1247710A1 |
| Способ сборки оси наведения телескопа | 1988 |
|
SU1545189A1 |
| Способ монтажа поворотной части телескопа | 1987 |
|
SU1504464A1 |
| Способ монтажа поворотной части телескопа на основании гидростатических опорах | 1985 |
|
SU1325244A1 |
| МОБИЛЬНЫЙ ОПТИЧЕСКИЙ ТЕЛЕСКОП | 2014 |
|
RU2565355C1 |
| Способ настройки системы контроля толщины масляной пленки в гидростатических опорах поворотной части телескопа | 1989 |
|
SU1610106A1 |
(21)4759050/27
(22) 22.08,89
(46) 15.12.91, Б юл, №45
(72) О.С.Нев и Ю.А. Бердинеких
(53)621,822.5(088.8)
(56)Авторское свидетельство СССР Ns 1373S.21, кл. F 16 С 33/14. 1988,
(54) СПОСОБ. ПРИРАБОТКИ ПОДШИПНИКОВЫХ ОПОР ОСЕЙ НАВЕДЕНИЯ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА ТЕЛЕСКОПА
(57)Изобретение относится к точному машиностроению, з частности к приработке подшипниковых опор осей наведения опор- но-позоротного устройства телескопа. Цель Изобретение относится к точному ма- шиностроэнию, в частности к приработке подшипниковых опор осей наведения опор- ню - поворотного устройства (ОПУ) высоко- гочнэгс телескопа.
Цель изобретений - повышение качества приработки.
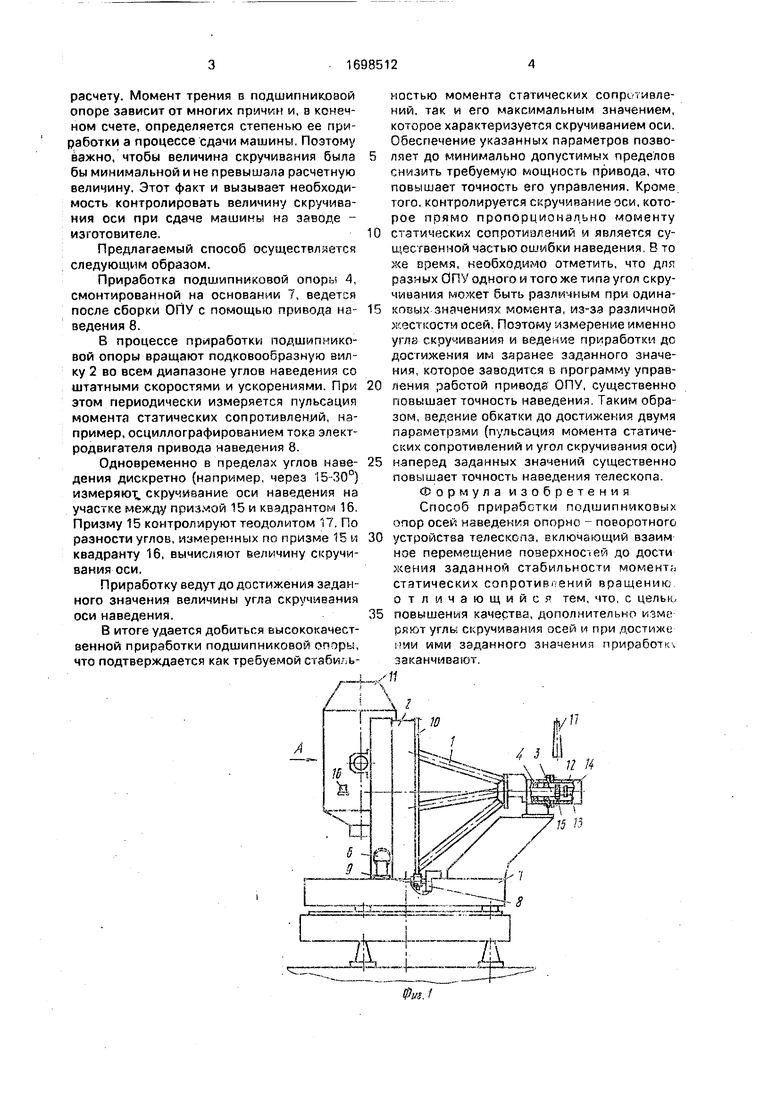
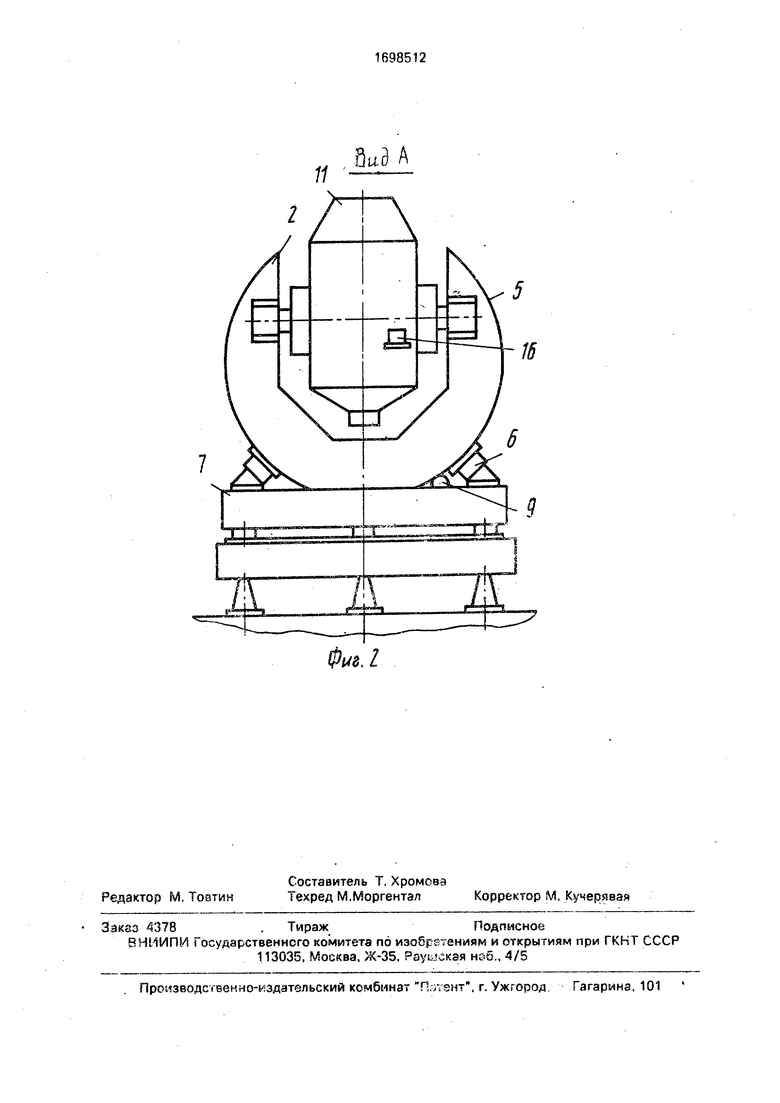
Из фугг.1 изображено опорно -поворот- HG- -: устройство телескоп ; на фмг.2 - вид А каф;.1-.1.
Ось наведение 1 выполнена в виде подковообразной вмлки 2 с /ЕОСТОВИКОМ 3, который закрепляется Б подшмпн;7хозой опоре 4. Псдковообрузная часть oci наведе- 5)ия 1 вь полненй с цилиндрической наружной поверхностью 5. которая опирается на гмдроста|М ;ес:с - 8 опоры 8. установленные на основании 7 опорно - поворотного уст- пойстз;/. На основании 7 Х СТЙНОРЛЭН также
повышение качества прирйЬсггки. В процессе приработки ось наведения вращается во всем диапазоне углов наведения со штатными скоростями и ускорениями. При этом измеряется пульсация момента статических сопротивлений. Одновременно в пределах углов наведения дискретно измеряют скручивание оси наведения от действия момента статических сопротивлений в подшипниковых опорах. Угол скручивания определяется по раз пост- показаний оптических приборов по хонцаг-.-: о см наведения. Приработка редзтся до дост л кзнич кэк пульсации, так и скруч /гания ос:-; нэперед о-дэпчых значений. Это позволяет обеспечмть и повышение точности наведения телескопа. 2 ил.
привод наьедени;; I (зле/ сс.змгатель с редуктором). Шестерня ) q . во да 8 сцепляется с з 5чатыг/, 10, жестко закреплен :ы;ч на подковообразной вилке 2. На торцовой части подковообразной зилки
2закреплена оптическая труба 11. На торце корпуса подшипниковой опоры 4 закреплен статор Г., э на торце хвостовика 3 закреплен ротор чЗ датчика обратной связи 14. Датчик обратной СРГ-: М 14 контролирует угол наведоннп телескопа из космический объект.
Следовательно, вел /чина скручивания оси наведонигг н, участке от подтипнико- зой опоры А дс ц-естерни 9 войдет ошибку нкуэд-эния. величина зависит от жестко- CTW оси, 2 также от момент сопротивления
3подшипниковой опоре 4 Жесткость - ве- лм«и;- Јз пос оямнзя и ; ;oiiso поддающаяся
сл
расчету. Момент трения Б подшипниковой опоре зависит от многих причин и, в конечном счете, определяется степенью ее приработки а процессе сдачи машины, Поэтому важно, чтобы величина скручивания была бы минимальной и не превышала расчетную величину. Этот факт и вызывает необходимость контролировать величину скручивания оси при сдаче машины на заводе - изготовителе.
Предлагаемый способ осуществляется следующим образом.
Приработка подшипниковой опоры 4, смонтированной на основании 7, ведется после сборки ОПУ с помощью привода наведения 8.
В процессе приработки подшипниковой опоры вращают подковообразную вилку 2 во всем диапазоне углов наведения со штатными скоростями и ускорениями. При этом периодически измеряется пульсация момента статических сопротивлений, например, осциллографированием тока электродвигателя привода наведения 8.
Одновременно в пределах углов наведения дискретно (например, через 15-30°) измеряют, скручивание оси наведения на участке между приз.мой 15 и квадрантом 16. Призму 15 контролируют теодолитом 17. По разности углов, измеренных по призме 15 и квадранту 16, вычисляют величину скручивания оси.
Приработку ведут до достижения заданного значения величины угла скручивания оси наведения.
В итоге удается добиться высококачественной приработки подшипниковой опоры, что подтверждается как требуемой стабильностью момента статических сопротивлений, так и его максимальным значением, которое характеризуется скручиванием оси. Обеспечение указанных параметров позволяет до минимально допустимых пределов снизить требуемую мощность привода, что повышает точность его управления, Кроме того, контролируется скручивание оси, которое прямо пропорционально моменту
статических сопротиалеиий и является существенной частью ошибки наведения. В то же время, необходимо отметить, что для разных ОПУ одного и того же типа угол скручивания может быть различным при одинаковых значениях момента, из-за различной жесткости осей. Поэтому измерение именно угла скручивания и ведение приработки до достижения им заранее заданного значения, которое заводится в программу управпения работой привода ОПУ, существенно повышает точность наведения. Таким образом, ведение обкатки до достижения двумя параметрами (пульсация момента статических сопротивлений и угол скручивания оси)
наперад заданных значений существенно повышает точность наведения телескопа. Формула изобретения Способ приработки подшипниковых опор осей наведения опорно - поворотного
устройства телескопа, включающий взаим ное перемещение поверхностей до дости жения заданной стабильности момента статических сопротивлений вращению отличающийся тем, что, с целью
повышения качества, дополнительно изме ряют углы скручивания осей и при достиже ими ими заданного значения приработка заканчивают.
11
7
ВиЭ А
