Изобретение относится к станкостроению и может быть использовано в станках для обработки удлиненных изделий.
Цель изобретения - повышение качества обработки путем устранения вибраций и повышения плавности подачи.
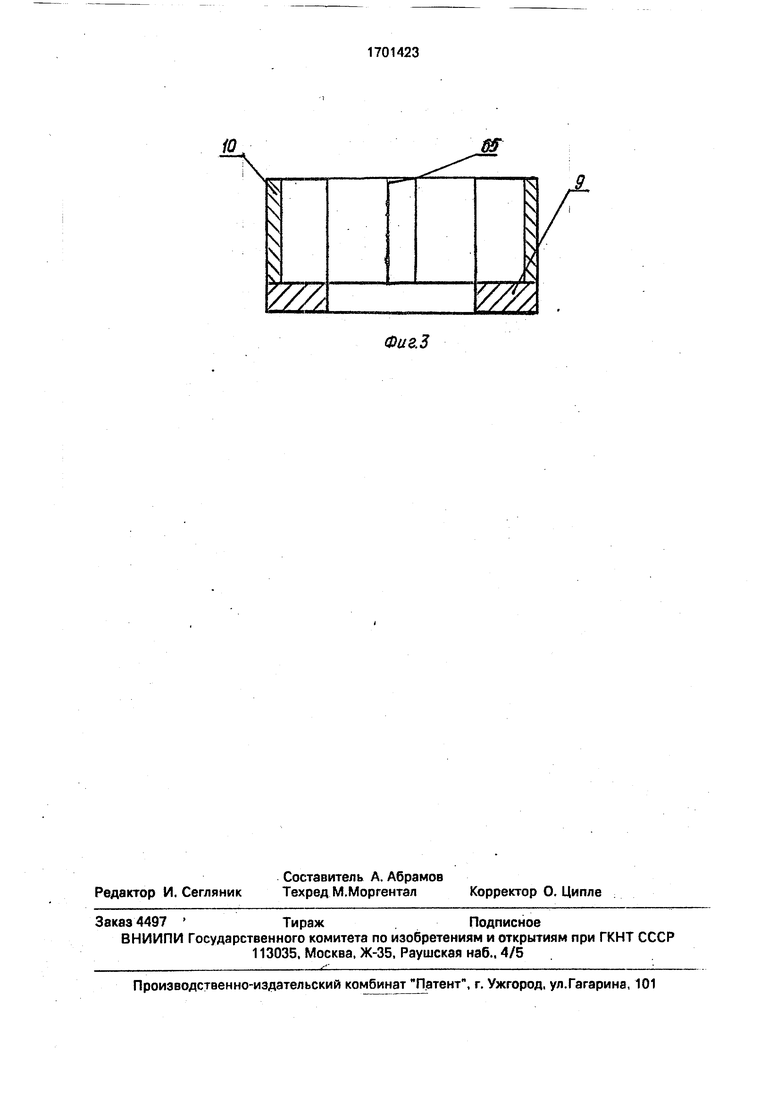
На фиг.1 показана кинематическая схема станка; на фиг.2 - режущий инструмент; на фиг.З - разрез А - А на фиг,2.
Предложенный токарный станок содержит основной двигатель 1 станка со шкивом 2, соединенный клиновидным ремнем 3 со шкивом редуктора 4. Зубчатое колесо 5 редуктора зацеплено зубчатым венцом 6 шпинделя. Шпиндель 7 содержит головку 8 с размещенными в ней центровочной втулкой 9 и мерным инструментом 10. Шпиндель 7 установлен в шпиндельной бабке 11. Через полый шпиндель 7 пропущено изделие 12. Зубчатые колеса 13 - 15 обеспечивают кинематическую связь шпинделя через венцы 6 и 16 со сдвоенной обгонной муфтой 17
и 18, установленной на ходовых валах 19 и 20. На ходовых валах закреплены зубчатые колеса 21 и 22, которые через зубчатые колеса 23 и 24 передают вращение червячным узлам 25 и 26.
Далее кинематические цепи, связывающие ходовые валы с суппортами, содержат зубчатые колеса 27 - 34, кулачковые муфты 35 и 36, зубчатые колеса 37 - 42, кулачковые муфты 43 и 44, зубчатые колеса 45 и 46 и зубчатые рейки 47 и 48. Для управления кулачковыми муфтами предназначены рычаги 49 и 50 с кнопками. На суппортах 51 и 52 установлены зажимные механизмы в виде патронов 53 и 54. Для обеспечения ускоренных перемещений суппортов двигатели 55 и 56 через шкивы 57 - 60 кинематически связаны с ходовыми валами. Все узлы станка смонтированы на станине 61. Для ручного управления предназначены маховики 62. Вилки 63 и 64 рычагов управления 49 и 50 соединены с валами кулачковых муфт.
§
Ј
N3 00
Инструмент 10 выполнен г ч i стыо 65.
Предложенное ytr оойстви , следующим образом
Вращение от двшагел . шре г при помощи клтюиого , 4-rje.i и ь двигателя 2 и шкив ред кгсрз 4 китрьи через вал соецинси с з бч мыг колс.о вращение с которого передней г, ауГч s ты и венец G поло о шпинделя 7, сот рчп п своей головко С сидерлч «рзп/ГННРЙ мерный инструмент 10 и цв) г )ui втулку 9,
Протсишшапиз изделия с, i портом 51 производите i до поло хоти з хвата справа от шпиндельной )зг- П которая располсжгна а спеднй и си пины 61 станка, захват производится кула i копым патроном 54 с пневмаг . лкиг приводом правого суппорта 52.
Пнезмопатрон 53 дивою суипорм о, при 31 ом, разжав свои кулачки CIIJMCrr.u u суппортом 51, перемещается влево .ч-п о ь родного захаата издели 12 a ,i- делия производигсл путем протглк левым суппортом 51 и про пчзанье pa вым суппортом 52.
Вращение со шпинделя 7 порэ saer i обгонной муфге 17 и 18 через peijen, Ь и зуЬ«атне колеса 3- 15иыг е.ц i
Обюнная муфта 17 и 18 neoe/cOi рабо нее вращение ходовьм ва зм 19 и 20, н« каждом вал/ 19 и 20 с ,,ОП о оссво го смещения закрепленьг зубчатые ко сС 21 и 22, зацепленные с ьуЬчягыми с (сгг, 23 и 24, и передают вращение . L ,i i ройства 25 и 26, с которых noa . iv.e переда егся на зубчатые колеса 31 и 32, ко горыо закреплены на валу червячного г. С зубчатых колес 31 и 32 ирэшгн е г, , передаваться по двум напр,1зле,и.м
При переводе рычагов 49 ч 50 t герчне. положение, вилки 63 ., 64 лерь еиопг i с колесами 37 и 38 в положение, TI i.cif на фиг, 1, когдз кулачковые муфц 1Л 43 сопряжены, враа эние с колес 31 и 3 дается на колеса 29, 27, 41, Jfj, 46 ч tic. зубчатую рейку 48 правого суппор а 52, д п его правого перемещения
На левом суппорте 51 вра i i-e i4-oe длется через зубчатые колеса 3d, 30 С 42 38,45 на зубчатую рейку 17левог jcyni OpTj 51. дл-1 его правоги пепе сщечил
При переводе рычагов 4С л 50 л л пс положение, вилки 63 и 64 перемест вз- ь с колесами 37 и 30 в протизопого кное лс яожеиие, изображенное на ibnr.l, и с )едг пят згом кулачковые муфты 5Г п 30, сращение с колес будет передана ся Ofr s колеса 31, 53, 37, 39, 15 (,а зубчлу У
j и ч of cyi fiooro 32 для его / евого пе иг Чч||АЦ)|),
i fiCuon i ч1 i ораще ine nepe- iHLicfi «o/ifcca Г° Зл J8 40, 45, на {j uiijin 47, цл перемещения суппорт j b BJ.3BO,
Дл | .CvOpc-MHOH подучи суппортов 51 и
i booxj sbio п хать i сгрсепные кнопки в
it-14i j 3 и СО при пэаож -нмг их и верхнем
) M ci ччхчгм noioxe .iii, чри этом включзIUICP / вчпгг/ui 55 и 56, коооые через шкиpf T9 i1 F7t i- i,, СП п г даю1- y upori,jO 3
-лще-ыо кодовым ьа ian 19 и 20 и через
-ч псма i- iBCKi h. ,r omicaii iiio выи,е,
ойьспр йг ускор.-ьг.О Э перемещение супnof т в 51 и К2 При зкаю i д
и об о&гоннан пуфта 17 и 18 fn клинмЕа-г кипЈ ,., ычес ю LF sn3 i ходовых валов 19
И 20 Ч) u H,) Пр-1 г ЛГШЗННЫХ ДОИ) idiensix ob n 56 эго ас оматически вос- Ч|Г члчвс1етс$1. Одногроменно и ы жзтием 1 но K.I (ригг слч включается лект- рзк управ тених пнавмопатрснами 53 и f 4 or:3KTijOKr ma о схема электродвнга- гСлС не гпказани)
i тачо зкэ рычагов 49 и 50 ft среднее
i можете рзгсоедичяотся кулачковые
t уфтп 05 35 Л3,44 nef смешсп ме суппсо OQ 5) , li i тоизаог ,гс вручную МРХОВИЧ j 32
. сл ; ч-й yjHCiO, JCnr 1f содержит ръ 1 /u j п , b j
и, из /.оз/х c ri4Tfii03 6 I- 52 з поед i «DM CTj lie вб посто1п оэ е обоэ 1)этыес епого ичцелия
2 . ОД1-ЧМ э п тв опатроноч 53 и 54, а
орнь и HHCi оумзьт 10 icipo и ro IHO ycTSi ь тлев/ d шпинделя 7 и обеспеп ва т очную чистспую об0сюо ку
(.i cpxmci .сд пий 12 при этом много(И ленные иех щио части 65 мерно-о лнст кинга ovior ьг о jЈFOT e ч о снижает
Mh 0 l i ir4Tr 10
Uenip viOiUJo г5г лка S обесг бчйвает iitp Rji n здстия 12 HJ иго продольной it hi. , i изделия
ОЬрлбс / 1 удлиь.ешо1С мзцзлия на rs г по чен1-on легко астомзтизиру1 5
1ь с о м / ч и з о и р е i ъ ч п ч
1 чэрь Сицеожащий стаьов31 чпе На стя 1инз 1 тпооты с приводом
.i)0 inn i захи, i ь i i иеханизмЈ1 к,
M li,ндс «и/ю Габк. с полым шпинделем,
i r лохе iH/io между суппортам . и р&зI o ViJ юлов- v сакрсипенн/о на полом
IL , о т л и i i ю щ и и с я теч, что, с
pjinc човьиления к чес ьа обработки y
см Л;|( оиорации п г саыш8ннл
j. МО/ц и njHB .t перечещсяия
26 4253® /п fffft
3(25 3032 М 36
С- J б к
г ь- Jill
S4
52
59
J3H3S бгяяяЯ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для точения фланцев | 2021 |
|
RU2780213C1 |
| УСТРОЙСТВО для ОБЕСПЕЧЕНИЯ ПОСТОЯНСТВА ЗАДАННОЙ СКОРОСТИ РЕЗАНИЯ | 1971 |
|
SU304109A1 |
| Металлорежущий станок для обработки тонкостенных цилиндрических деталей | 1982 |
|
SU1092011A1 |
| Токарный станок | 1978 |
|
SU994118A2 |
| Многошпиндельный токарный автомат | 1985 |
|
SU1304988A1 |
| Автомат для изготовления плоских спиральных пружин | 1975 |
|
SU534286A1 |
| ПЕРЕКЛЮЧАТЕЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПЕРЕМЕННО-ВОЗВРАТНОГО ДВИЖЕНИЯ СТОЛА ШЛИФОВАЛЬНОГО СТАНКА | 1926 |
|
SU20979A1 |
| Автомат для навивки капиллярных труб | 1989 |
|
SU1673241A1 |
| Станок для намотки обмоток электрических катушек | 1980 |
|
SU1023418A1 |
| СТАНОК ПЛОСКОШЛИФОВАЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ | 1994 |
|
RU2080237C1 |

Изобретение относится к области станкостроения и может быть использовано в станках для обработки удлиненных изделий. Целью изобретения является повышение качества обработки путем устранения вибраций и повышения плавности подачи. Двигатель 1 кинематически связан со шпинделем 7, на котором закреплена головка 8 с центрирующей втулкой 9 и инструментом 10. Со шпинделем 7 кинематически связаны посредством сдвоенной обгонной муфты 17,18, ходовые валы 19,20. Ходовые валы кинематически связаны с суппортами 51,52 и двигателями 55,56 ускоренных перемещений. При работе станка суппорты 51,52 перемещаются с рабочей подачей по кинематической цепи, связывающей их со шпинделем 7, и ускорением от двигателей 55, 56. 3 ил.
Фи&2
ю
&
Фиг.З
| Механизм подачи к бесцентрово- ТОКАРНОМу СТАНКу | 1979 |
|
SU810380A2 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
