сд
о
КР
Изобретение относится к зпектро- технике и может Выть использовано в. текстильной промьшшенности.
Цель изобретения - повьппение точности регулирования.
На чертеже представлена схема устройства электропривода.
Многодвигательный электропривод содержит секции, включающие ведущий 1 и ведомый 2 электродвигатели, якорные обмотки которых подключены к нереверсивным тиристорным преобразователям 3 и А, последовательно соединенные общие эадатчики скорости 5 и интенсивности 6, выход которого подключен к входам регуляторов 7 и 8 скорости, электродвигателей 1 и 2, Вторые входы регуляторов 7 и 8 скорости подключены к датчикам 9 и 10 скорости. Кроме того, электропривод содержит петлевой компенсатор 11 с датчиком 12 положения изадатчик 13 п
ложения, а регулятор положения выпол
иен в виде параллельно включенных пропорционального 14 и интегрального 15 усилителей с блоками 16 и 17 ограничения, причем управляющий вход блока 17 ограничения интегрального усилителя 15 подключен к выходу датчика 10 скорости электродвигателя 2, третий и четвертый входы регулятора 8 скорости ведомого электродвигателя 2 связаны с выходами пропорционального 1 4 и интегрального 15 усилителей, входы которых подключены к задатчи- ку 13 и датчику 12 положения компенсатора 1 1 .
Электропривод содержит также блок
Q 0 дах усилителя 14 и блока 18 умножения так же равны кулю. На выходе усилителя 15 в этом режиме устанавлива- ется такой уровень напряжения, кото0
5
рый обеспечивает путем воздействия на регулятор 8 скорости равенство, т.е. поддерживает ролик компенсатора 11 в заданном положении.
На максимальной скорости работы линии, т.е. когда Ujy и коэффициент передачи блока 18 умножения максимален для настройки регулятора положения, подбирают величину коэффициента
5 усиления и постоянную времени интегрирования регулятора, исходя из выбранного типа оптимума. В этом же режиме выставляют блоком 16 ограничения напряжение на выходе блока 18 умножения, составляющее обычно 20-30% от Ujy и обеспечивающее необходимую под- ре гуЛиров очную способность контура положения, а также выставляют максимальный уровень ограничения усилите5 ля 15 блоком 17 ограничения.
На минимальной скорости работы линии, когда и,„йО, за счет U подбирают такой коэффициент передачи блок а 18 умножения, чтобы переходный процесс по положению компенсатора был оптимальным на данном уровне скорости. При этом автоматически выставляется необходимая подрегулировочная способность на данном уровне скорости, например пускают линию на минимальную скорость при нахождении компенсатора в одном из крайних положений и подбирают и такое, чтобы переходный процесс по положению ком
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| Устройство для позиционного управления электроприводом постоянного тока | 1981 |
|
SU1003286A1 |
| Электропривод рабочего рольганга | 1983 |
|
SU1129709A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2225067C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ И СИЛ ТЯГИ И ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ МНОГОСЕКЦИОННОГО ЭЛЕКТРОВОЗА | 1995 |
|
RU2099210C1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Асинхронный частотно-регулируемый электропривод | 1983 |
|
SU1153386A1 |
| Электропривод с двухзонным регулированием скорости | 1988 |
|
SU1644343A1 |
Изобретение относится к электротехнике и может быть использовано в текстильной промьшленности. Целью изобретения является повышение точности регулирования. Устройство содержит пропорциональный усилитель 14 и интегральный усилитель I5 с блоками ограничения 16, 17 в цепи обратной связи. Выход усилителя .15 соединен с входом регулятора скорости 8, выход усилителя 14 - с входом блока 18 умножения. Второй вход блока 1В множения соединен с задатчиком интенсивнс)сти 6 и источником 19 напряжения смещения. Выход блока 18 умножения соединен с входом регулятора скорости 8. В данном устройстве обеспечивается оптимальная настройка переходных процессов по положению компенсатора как на максимально), так и на минимальной скоростях. При этом учитьшаются максимальное возмущение по положению компенсатора и момент статического сопротивления на данных уровнях скорости. 1 з.п. ф-лы, 1 ил. л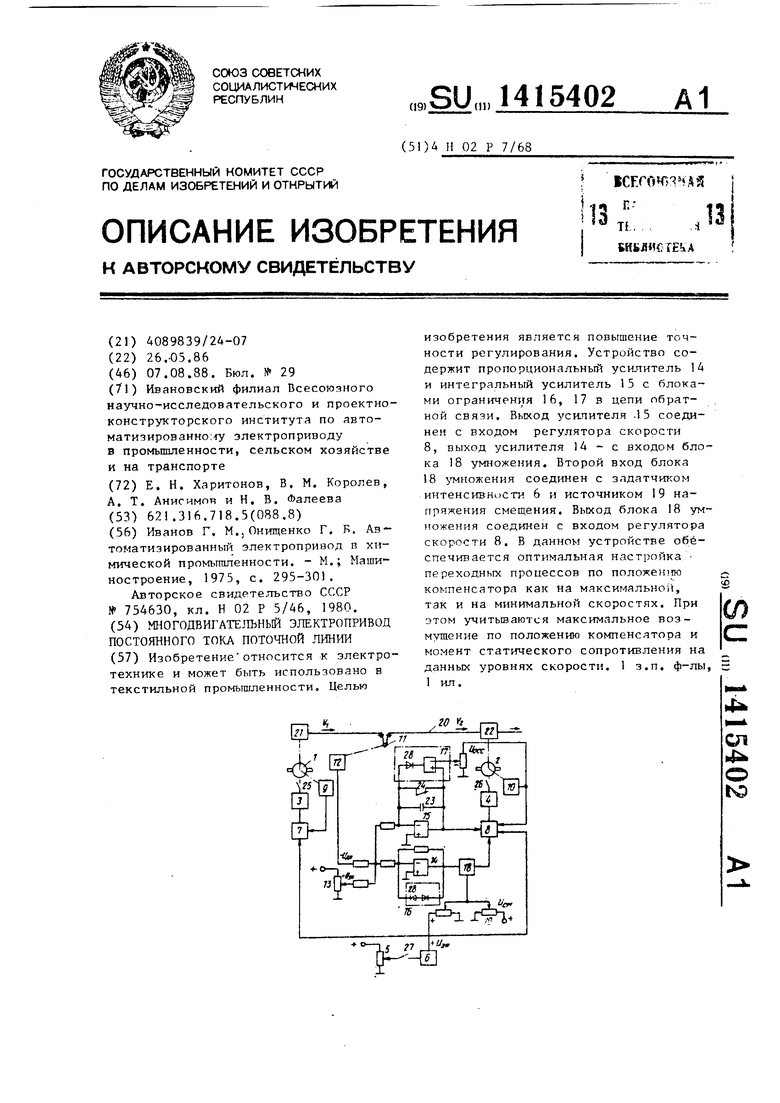
18 умножения и источник 19 напряжения 40пенсатора был оптимальным. Основное
смещения, причем выход пропорциональ-возмуг;аю1цее воздействие при пуске
ного усилителя 14 подключен к первомуидет через пропорциональный усилитель
входу блока 18 умножения, второй14, поэтому сигнал с его выхода повход которого подключен к задатчикупропускается через ограничивающий
6 и 1тенсивности и источнику 19 напря-д5его блок 18 умножения, а усилитель 15
жения смещения, а выход - к входу ре-плавно меняет свою выходную величину
гулятора 8 скорости ведомого злект-и не вызьшает значительных перерегуродвигателя 2.лирований при пуске, поэтому величину
Многодвигательный электропривод работает следующим образом.
Обрабатываемый материал 20 с постоянным натяжением проводится через технологические машины 21 и 22. Ролик компенсатора 11 находится в заданном положении, при этом Одп U зп и, следовательно, разность эт5гх напряжений, подаваемая через резисторы нл вх(1Д пропорционального усилителя - 14, равна нулю. Напряжения на выхо
подрегулировки у него с уменьшением скорости можно не изменять.
Если в исходном положении конденсатор 23 усилителя 15 не заряжен (зашунтирован контактом 24 реле или пускателя, который служит для задания нулевых начальных условий усилителя 15). В момент, предшествующий пуску привода, величина и полярность напряжения на входах усилите.-1я 1 5 и пропорционального усилителя 14 определи
ется разностью Ugp - При нижнем положении ролика компенсатора 11 напряжение на входах усилителя 15 и пропорционального усилителя 1А отри- цательно, причем на выходе усилителя 15 оно равно нулю, а на выходе пропорционального усилителя 14 оно определяется его коэффициентом усиления, но не может превышать, однако, напря- жения пробоя стабилитрона блока 16 ограничения.
При пуске, например на малую заправочную скорость, контакты 5-27 замыкаются, а контакт 24 размыкается При этом напряжение на выходе задат- чика 6 интенсивности линейно растет с заданным темпом. Соответственно растет скорость ведущего двигателя 1 с темпом, определяемым задатчиком 6 интенсивности, что обеспечивается замкнутой системой автоматического регулирования.
При размыкании контакта 24 на выходе усилителя 15 начинает возрастать напряжение положительной полярности, темп роста которого зависит от постоянной интегрирования. Выходной сигнал пропорционального усилителя 14 положителен и ограничивается блоком 16 ограничения и блоком 18 умножения до величины, выбранной при настройке регулятора 8.
В результате происходит более быстрый разгон двигателя 2 и транспортирующих органов обрабатьшающей ма- гаины 22. Поскольку в процессе разгона V 7 V , ролик компенсатора двигается вверх. К моменту достижения компенсатором 11 заданного среднего положения, когда иди - зп О, конденсатор 23, заряженный до некоторой величины напряжения положительной полярности, разряжается до величины, обеспечивающей компенсацию неидеальности характеристик регуляторов скорости и двигателей, а на выходе пропорционального усилителя 14 и соответственно блока 18 умножения напряжения равны нулю. Таким образом, ограничение блоком 16 большого возмущающего воздействия по положению петли компенсатора приводит к тому, что компенсатор достигает заданного положения с незначительным перерегу- лированием.
В момеят, предшествующий пуску привода при крайнем верхнем положени ролика компенсатора, напряжение на
5
5
0
5
входах интегрального усилителя 15 и . пропорционального усилителя 14, определяемое разностью Ujn - Удр, положительно, причем на выходе усилителя 15 оно равно нулю, а на выходе пропорционального усилителя-14 оно отрицательно.
При пуске привода контакты 25-27 замыкаются, а контакт 24 размыкается. При этом напряжение на выходе задат- чика 6 интенсивности линейно растет с заданным темпом, соответственно растет скорость ведущего двигателя 1 с темпом, определяемым задатчиком 6 ,интен ивности, что обеспечивается замкнутой системой автоматического регулирования.
При размыкании контакта 24 на выходе yci-шителя 15 начинает возрастать напряжение отрицательной полярности, и при превышении им напряжения Ujcj. диод 28 открьшается и значение напряжения на выходе усилителя 15 определяется величиной UQCC Выходной сигнал пропорционального усилителя 14 в этот момент отрицателен и по мере дв1-гжения компенсатора к заданному положению убьтает.
Происходит разгон двигателя 2 и транспортирующих органов обрабатьша- (ощей мащины 22 (с более низким темпом по сравнению с задаваемым с задатчика 6 интенсивности). Поскольку в процессе разгона V , , ролик компенсатора двигается вниз. В момент достижения роликом компенсатора 11 заданного среднего положения, когда
и
АЛ
- и п 0 конденсатор 23, заря
женный до некоторой величины напряжением отрицательной полярности, начинает разряжаться до величины, обеспечивающей компенсацию неидеальности характеристик регуляторов скорости и двигателей, а на выходе пропорционального усилителя 14 появляется незначительный положительный сигйал, компенсирующий сигнал с выхода усилителя 15. Тем самым обеспечивается оптимальный переходный процесс по положению компенсатора. Переходный процесс оптимален во всем диапазоне регулирования скорости за счет адаптивного изменения коэффициента усиления системы в зависимости от уровня скорости.
При изменении положения компенсатора вверх от заданного в момент, предществующий изменению положения
компенсатора, напряжения на входах усилителя 15, пропорционального усилителя 14 и блока 18 перемножения равны нули. На выходе усилителя 15 имеется Небольшое напряжение, оно запомнилось им после отработки предыдущего возмущения.
При резком изменении положения компенсатора вверх от заданного положения на входы усилителя 15 и пропорционального усилителя 1А поступает положительный сигнал. На выходе блока 18 умножения напряжение изменится. На выходе усилителя 15 начинает возрастать напряжение отрицательной полярности, и оно может дорасти до напряжения ограничения, определяемое U-j-j, . Темп его роста зависит от величины (и - ,) и постоянной интегрирования. При достижении напряжением с выхода усилителя 15 напряжения ограничения . , пропорционального скорости, управляемым блоко 17 ограничения оно поддерживается постоянным. К сигналам на входе регулятора 8 скорости добавляются отрицательные сигналы с выходов усилителя 15, и блока 18 умножения, напряжение на входе регулятора 8 ско-. рости снижается и двигатель 2 переходит в режим торможения. Скорость V становится меньше V, и ролик компенсатора II двигатеся вниз. При приближении компенсатора к заданному положению переходные процессы протекают аналогично.
В предлагаемом устройстве обеспечиваются оптимальные ускорения и скорость движения компенсатора, адаптивное изменение коэффициента усиления системы в зависимости от уровня скорости и устранение неуправляе- мьк режимов в нереверсивных тиристор ных преобразователях. Это позволяет уменьшить перерегулирование и обеспечить болие оптимальньгй закон движени компенсатора.
Составитель М. Кряхтунова Редактор Н. Бобкова Техред Л.Олийнык Корректор г. Решетник
Заказ 3884/54
Тираж 583
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раущская наб., д. 4/5
026
Формула изобретения
1 о Многодвигательньгй электропривод постоянного тока поточной линии, содержащий секции, включающие ведущий и ведомый электродвигатели, якорные обмотки которых подключены к нереверсивным тиристорным преобразователям,
последовательно соединенные общие за- датчик скорости и задатчик интенсивности, выход которого подключен к входам регуляторов скорости электродвигателей, вторые входы регуляторов
скорости подключены к датчикам скорости электродвигателей, петлевой компенсатор с датчиком положения, отличающийся тем, что, с целью повышения точности регулирования, в него дополнительно введены задатчик положения компенсатора и регулятор положения, выполненный в виде параллельно включенных пропорционального и интегрального усилителей с блоками ограничения, причем управляющий вход блока ограничения интегрального усилителя подключен к выходу датчика скорости ведомого электродвигателя, третий и четвертый
входы регулятора скорости ведомого электродвигателя связаны с выходами пропорционального и интегрального усилителей, входы которых подключены к задатчику и датчику положения компенсатора.
Подписное
| Иванов Г | |||
| М..0ншченко Г | |||
| R | |||
| Автоматизированный электропривод п химической промышленности | |||
| - М.; Машиностроение, 1975, с | |||
| УСТРОЙСТВО ПАРОПЕРЕГРЕВАТЕЛЯ | 1920 |
|
SU295A1 |
| Авторское свидетельство СССР № 754630, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
