Изобретение относится к устройствам для неразрушающего контроля и может быть использовано для контроля, например, вертикальных резервуаров и корпусов атомных реакторов.
Целью изобретения является повышение точности контроля за счет повышения точности сканирования преобразователей по поверхности изделия.
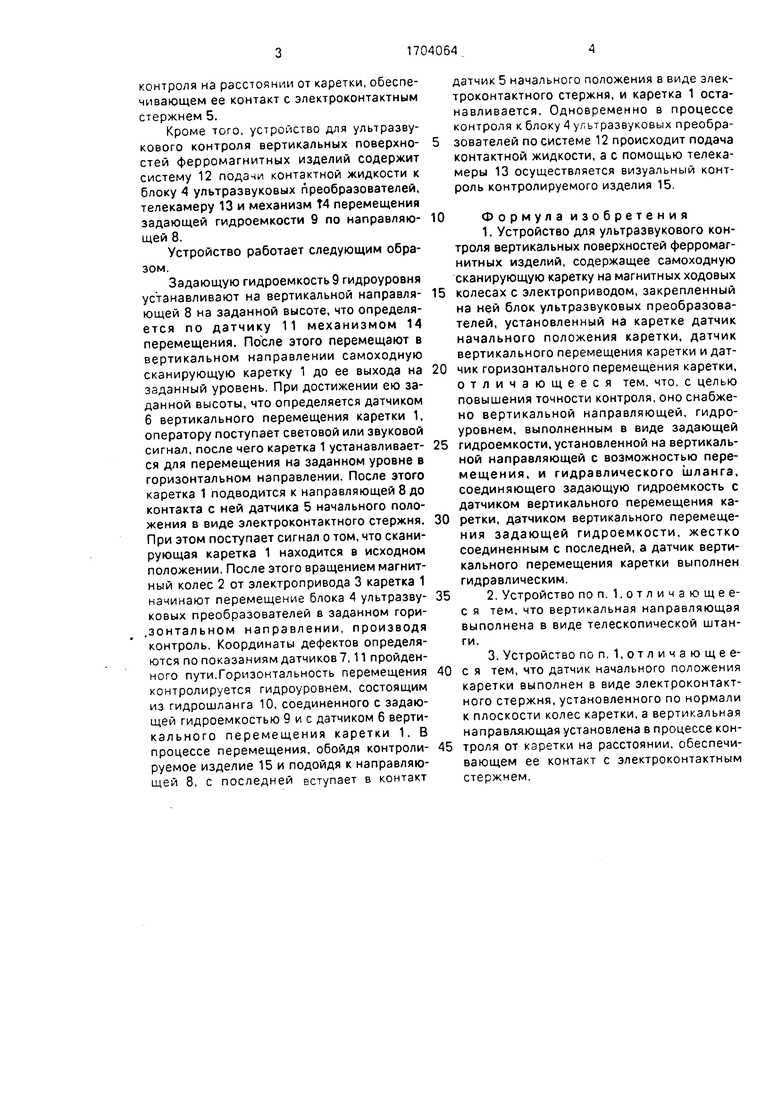
На фиг. 1 схематично изображено устройство для ультразвукового контроля вертикальных поверхностей ферромагнитных изделий; на фиг. 2 - сечение А-А на фиг. 1.
Предлагаемое устройство содержит самоходную сканирующую каретку 1 на магнитных ходовых колесах 2 с электроприводом 3. закрепленный на ней блок 4 ультразвуковых преобразователей, установленный на каретке 1 датчик 5 начального положения каретки 1, датчик 6 вертикального перемещения каретки 1, датчик 7 горизонтального перемещения каретки 1. вертикальную направляющую 8, гидроуровень, выполненный в виде задающей гидроемкости 9. установленной на вертикальной направляющей 8 с возможностью перемещения, и гидравлического шланга 10, соединяющего задающую гидроемкость 9 с датчиком 6 вертикального перемещения каретки 1, датчик 11 вертикального перемещения задающей гидроемкости 9. жестко соединенный с последней. Датчик 11 вертикального перемещения каретки 1 выполнен гидравлическим, вертикальная направляющая 8 выполнена в виде телескопической штанги, датчик 5 начального положения каретки 1 выполнен в виде электроконтактного стержня, установленного по нормали к плоскости колес 2 каретки 1, а вертикальная направляющая 8 установлена в процессе
VI
О
о о
N
контроля на расстоянии от каретки, обеспечивающем ее контакт с электроконтактным стержнем 5.
Кроме того, устройство для ультразвукового контроля вертикальных поверхностей ферромагнитных изделий содержит систему 12 подачи контактной жидкости к блоку 4 ультразвуковых преобразователей, телекамеру 13 и механизм Т4 перемещения задающей гидроемкости 9 по направляющей 8.
Устройство работает следующим образом.
Задающую гидроемкость 9 гидроуровня устанавливают на вертикальной направляющей 8 на заданной высоте, что определяется по датчику 11 механизмом 14 перемещения. После этого перемещают в вертикальном направлении самоходную сканирующую каретку 1 до ее выхода на заданный уровень. При достижении ею заданной высоты, что определяется датчиком 6 вертикального перемещения каретки 1, оператору поступает световой или звуковой сигнал, после чего каретка 1 устанавливается для перемещения на заданном уровне в горизонтальном направлении. После этого каретка 1 подводится к направляющей 8 до контакта с ней датчика 5 начального положения в виде электроконтактного стержня. При этом поступает сигнал о том, что сканирующая каретка 1 находится в исходном положении. После этого вращением магнитный колес 2 от электропривода 3 каретка 1 начинают перемещение блока 4 ультразвуковых преобразователей в заданном гори- .зонтальном направлении, производя контроль. Координаты дефектов определяются по показаниям датчиков 7,11 пройденного пути.Горизонтальность перемещения контролируется гидроуровнем, состоящим из гидрошланга 10, соединенного с задающей гидроемкостью 9 и с датчиком 6 верти- кального перемещения каретки 1. В процессе перемещения, обойдя контролируемое изделие 15 и подойдя к направляющей 8, с последней вступает в контакт
датчик 5 начального положения в виде электроконтактного стержня, и каретка 1 останавливается. Одновременно в процессе контроля к блоку 4 ультразвуковых преобра- зователей по системе 12 происходит подача контактной жидкости, а с помощью телекамеры 13 осуществляется визуальный контроль контролируемого изделия 15.
Ф о р м у л а и з о б р е т е н и я
1. Устройство для ультразвукового контроля вертикальных поверхностей ферромагнитных изделий, содержащее самоходную сканирующую каретку на магнитных ходовых
колесах с электроприводом, закрепленный на ней блок ультразвуковых преобразователей, установленный на каретке датчик начального положения каретки, датчик вертикального перемещения каретки и датчик горизонтального перемещения каретки, отличающееся тем, что, с целью повышения точности контроля, оно снабжено вертикальной направляющей, гидроуровнем, выполненным в виде задающей
гидроемкости, установленной на вертикальной направляющей с возможностью перемещения, и гидравлического шланга, соединяющего задающую гидроемкость с датчиком вертикального перемещения каретки, датчиком вертикального перемещения задающей гидроемкости, жестко соединенным с последней, а датчик вертикального перемещения каретки выполнен гидравлическим.
2. Устройство поп. 1,отличающее- с я тем, что вертикальная направляющая выполнена в виде телескопической штанги.
3. Устройство поп.1,отличающеес я тем, что датчик начального положения каретки выполнен в виде электроконтактного стержня, установленного по нормали к плоскости колес каретки, а вертикальная направляющая установлена в процессе контроля от каретки на расстоянии, обеспечивающем ее контакт с электроконтактным стержнем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированного неразрушающего контроля поверхностных дефектов объектов и устройство для его реализации | 2024 |
|
RU2832205C1 |
| Способ проведения неразрушающего контроля цилиндрических объектов и автоматизированный комплекс для его реализации | 2020 |
|
RU2764607C1 |
| Сканирующее устройство к дефектоскопу | 1984 |
|
SU1231456A1 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |
| Сканирующее устройство | 1989 |
|
SU1640633A1 |
| Сканирующее устройство для ультразвукового контроля сварных швов изделий | 1982 |
|
SU1128161A1 |
| Мобильный робот для побелки стволов деревьев | 2022 |
|
RU2795158C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| Сканирующее устройство для бумагоделательных машин | 1979 |
|
SU990925A1 |

Изобретение относится к устройствам для неразрушающего контроля и может быть использовано для контроля, например. вертикальных резервуаров и корпусов атомных реакторов. Целью изобретения является повышение точности контроля. В процессе контроля каретка с блоком ультразвуковых преобразователей устанавливается на контролируемом изделии на заданной высоте, который контролируется с помощью гидроуровня, состоящего из укрепленной на вертикальной направляющей задающей гидроемкости, гидрошланга и датчика вертикального перемещения каретки, выполненного гидравлическим. Этим способом задается вертикальная координата каретки, а горизонтальная координата отмечается датчиком горизонтального перемещения, закрепленным на каретке. 2 з.п. ф-лы, 2 ил.
| Авторское свидетельство СССР Nk 1269661, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
