перемещения механизма вертикального перемещения акустического блока 5 представляет собой канатную передачу. Механизм вертикального перемещения выполнен в виде шарнирно-рычажной системы из двух пар телескопических рычагов, установленных с возможностью поворота в вертикальной плоскости. Держатель 17 акустического
блока установлен с возможностью вертикального перемещения. Сканирующее устройство имеет блок автоматики, элементами которого являются электромагнитные датчики положения и конечные выключатели 12, 19 и 24, а корпус выполнен в виде каретки, установленной на направляющих. 2 ил.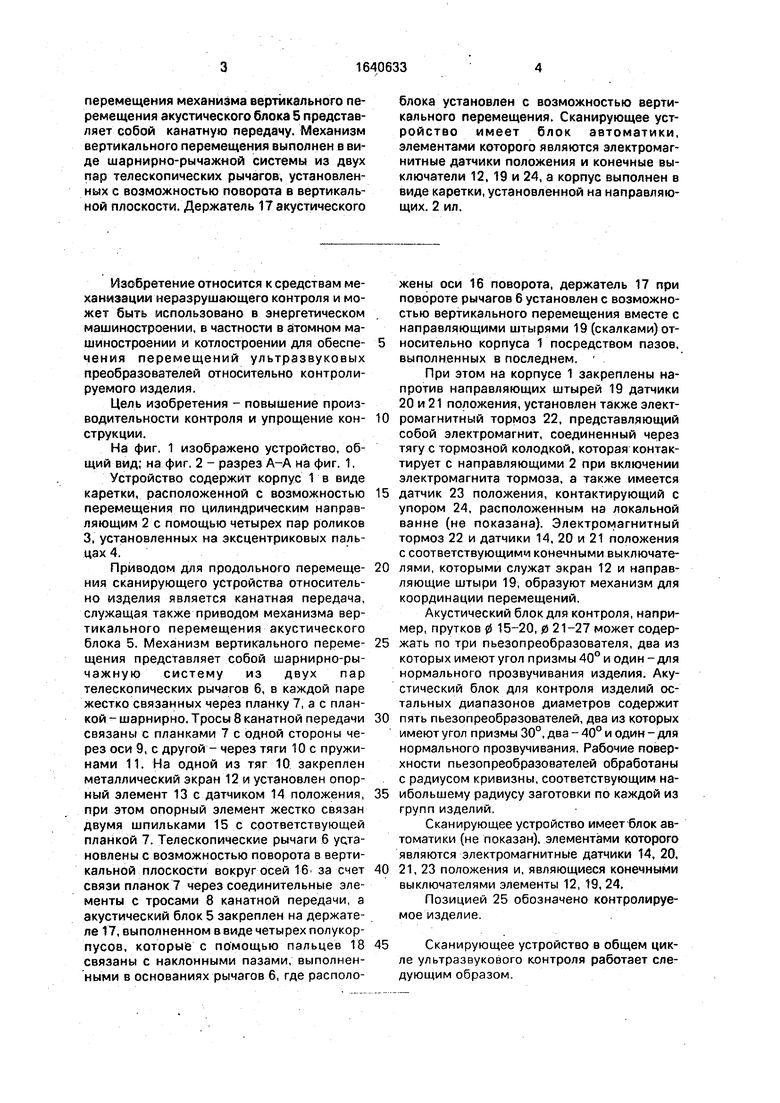

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |
| Подвесное устройство для перемещения груза | 1989 |
|
SU1691233A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Устройство для укладки штучных изделий в тару | 1979 |
|
SU973412A1 |
| Стенд для изменения углов сходимости управляемых колес транспортного средства | 1981 |
|
SU1023207A1 |
| Устройство приема-передачи груза грузовой тележки судовой канатной дороги на принимающем судне | 2022 |
|
RU2788548C1 |
| Автооператор | 1982 |
|
SU1033288A1 |
| Автоматизированный шпулярник для сновальных машин | 1983 |
|
SU1089185A1 |
| Устройство для автоматической смены инструментов на металлорежущем станке | 1978 |
|
SU1036238A3 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ, ПОСТАНОВКИ И ПРИЕМА БУЯ С ПЛАВУЧИМ ПРОВОДОМ НА ПОДВОДНОМ ТЕХНИЧЕСКОМ СРЕДСТВЕ | 2001 |
|
RU2186707C1 |

Изобретение относится к средствам механизации неразрушающего контроля и может быть использовано в энергетическом машиностроении, в частности в атомном машиностроении и котлостроении Целью изо- бретения является повышение производительности контроля и упрощение конструкции, Эта цель достигается за счет нение й ам мея и моеском ом маю изо- ение щение а счет А-А того, что в устройстве основным элементом механизма для координации перемещений является электромагнитный тормоз 22 предназначенный для развязки во времени операций подъема и опускания акустического блока на контролируемую поверхность и продольного перемещения по ней блока 5 без выключения общего привода При этом размещение датчиков положения, взаимодействующих с конечными выключателями 12 19 и 24 контролирует установку акустического блока на поверхность изделия останов каретки 1 при сходе с изделия акустического блока и подъема его в крайнее верхнее положение а также отключение тормоза при реверсивном продольном перемещении устройства в исходное положение Привод продольного 23 22 ( К О с 00 со Фиг I
Изобретение относится к средствам механизации неразрушающего контроля и может быть использовано в энергетическом машиностроении, в частности в атомном машиностроении и котлостроении для обеспе- чения перемещений ультразвуковых преобразователей относительно контролируемого изделия.
Цель изобретения - повышение производительности контроля и упрощение кон- струкции.
На фиг. 1 изображено устройство, общий вид; на фиг, 2 - разрез А-А на фиг. 1.
Устройство содержит корпус 1 в виде каретки, расположенной с возможностью перемещения по цилиндрическим направляющим 2 с помощью четырех пар роликов 3, установленных на эксцентриковых пальцах 4.
Приводом для продольного перемеще- ния сканирующего устройства относительно изделия является канатная передача, служащая также приводом механизма вертикального перемещения акустического блока 5. Механизм вертикального переме- щения представляет собой шарнирно-ры- чажную систему из двух пар телескопических рычагов 6, в каждой паре жестко связанных через планку 7, а с планкой - шарнирно. Тросы 8 канатной передачи связаны с планками 7 с одной стороны через оси 9, с другой - через тяги 10 с пружинами 11. На одной из тяг 10 закреплен металлический экран 12 и установлен опорный элемент 13 с датчиком 14 положения, при этом опорный элемент жестко связан двумя шпильками 15 с соответствующей планкой 7. Телескопические рычаги 6 установлены с возможностью поворота в вертикальной плоскости вокруг осей 16. за счет связи планок 7 через соединительные элементы с тросами 8 канатной передачи, а акустический блок 5 закреплен на держателе 17, выполненном в виде четырех полукорпусов, которые с помощью пальцев 18 связаны с наклонными пазами, выполненными в основаниях рычагов 6, где расположены оси 16 поворота, держатель 17 при повороте рычагов 6 установлен с возможностью вертикального перемещения вместе с направляющими штырями 19 (скалками) относительно корпуса 1 посредством пазов, выполненных в последнем.
При этом на корпусе 1 закреплены напротив направляющих штырей 19 датчики 20 и 21 положения, установлен также электромагнитный тормоз 22, представляющий собой электромагнит, соединенный через тягу с тормозной колодкой, которая контактирует с направляющими 2 при включении электромагнита тормоза, а также имеется датчик 23 положения, контактирующий с упором 24, расположенным на локальной ванне (не показана). Электромагнитный тормоз 22 и датчики 14, 20 и 21 положения с соответствующими конечными выключателями, которыми служат экран 12 и направляющие штыри 19, образуют механизм для координации перемещений.
Акустический блок для контроля, например, прутков 0 15-20, 0 21-27 может содержать по три пьезопреобразователя, два из которых имеют угол призмы 40° и один -для нормального прозвучивания изделия. Акустический блок для контроля изделий остальных диапазонов диаметров содержит пять пьезопреобразователей, два из которых имеют угол призмы 30°, два - 40° и один - для нормального прозвучивания. Рабочие поверхности пьезопреобразователей обработаны с радиусом кривизны, соответствующим наибольшему радиусу заготовки по каждой из групп изделий.
Сканирующее устройство имеет блок автоматики (не показан), элементами которого являются электромагнитные датчики 14, 20, 21, 23 положения и, являющиеся конечными выключателями элементы 12, 19, 24.
Позицией 25 обозначено контролируемое изделие.
Сканирующее устройство в общем цикле ультразвукового контроля работает следующим образом.
Изделие25 размещено в локальной ванне на приводных валках кантователя (не показан), В исходном положении датчик 23 контактирует с упором 24, а акустический блок 5 находится в своем крайнем верхнем положении над регулируемой опорой (не показана), уровень которой установлен в зависимости от диаметра изделия 25, загруженного в локальную ванну для последующего контроля, Запуск рабочего цикла производится по управляющему сигналу датчика положения изделия, который свидетельствует о наличии изделия в локальной ванне и о правильной ориентации его на приводных валках кантователя. При наличии этого управляющего сигнала с помощью, например, электромагнитного реле схемы управления происходит одновременное включение: привода вращения изделия; привода канатной передачи, электромагнита тормоза 22.
При этом тормозная колодка под действием электромагнита поджимается к направляющим 2, фиксируя каретку 1 скани- - рующего устройства при действующем приводе канатной передачи, Включение тормоза 22 в данный момент предусмотрено для координации (разделения во времени) операций опускания акустического блока 5 на регулируемую опору, соответствующую уровню поверхности контролируемого изделия 25, и рабочего хода каретки 1, т.е. ее поступательного перемещения по поверхности изделия.
Опускание акустического блока 5 происходит следующим образом. Под действием тросов 8 канатной передачи рычаги 6 поворачиваются вокруг осей 16 и опускают держатель 17, связанный через пальцы 18 с основаниями рычагов 6, на поверхность, при этом дополнительное натяжениетросов 8, возникающее при заторможенной каретке 1, растягивает пружины 11, в результате чего экран 12 перемещается до контакта с датчиком 14 положения, сигнал от которого через реле схемы управления выключает электромагниный тормоз 22, при этом сразу начинается перемещение вдоль контролируемой поверхности каретки 1 на роликах 3 по направляющим 2 при контакте акустического блока 5 с изделием 25.
Окончание контроля происходит при сходе акустического блока с изделия. Сойдя с изделия, акустический блок совершает дополнительное движение вниз, т.е. рычаги б при повороте вокруг осей 16 за счет тягового усилия тросов 8 обгоняют блок, позволяя зафиксировать конец изделия. Таким образом, акустический блок 5 занимает крайнее нижнее положение, а так как
при вертикальных перемещениях держателя 17 акустического блока 5, осуществляемых при повороте рычагов 6, вместе с держателем 17 перемещаются направляющие штыри 19, то при опускании держателя ниже уровня поверхности изделия 25 штырь 19, взаимодействующий с датчиком 21 положения, ,выходит из зоны чувствительности этого датчика, по сигналу от которого через
0 реле схемы управления подается команда на одновременное отключение привода вращения изделия, переключение привода канатной передачи на реверс; включение электромагнита тормоза 22.
5Включение тормоза при реверсе канатной передачи обеспечивает при фиксированном положении каретки 1 подъем держателя 17 с акустическим блоком 5 в крайнее верхнее положение за счет обрзт0 .ного поворота рычагов 6, связанных с тросами 8 канатной передачи, при этом держатель 17 поднимается вверх вместе с направляющими штырями 19, один из которых входит в зону чувствительности датчика
5 20 положения, сигнал от которого через реле схемы управления отключает тормоз 22, после чего сканирующее устройство с транспортной скоростью возвраа ается в исходное положение до контакта упора 24 с
0 датчиком 23.
Формула изобретения Сканирующее устройство, содержащее корпус, связанный с ним держатель акустического блока, механизмы вертикального и
5 продольного перемещения акустического блока с приводом продольного перемещения и конечные выключатели, отличающееся тем, что, с целью повышения производительности контроля и упрощения
0 конструкции, оно снабжено механизмом для координации перемещений, выполненным в виде электромагнитного тормоза, тормозной колодки и датчиков положения с конечными выключателями, приводом меха5 низма вертикального перемещения акустического блока, объединенным с приводом продольного перемещения и выполненным в виде канатной передами, механизм вертикального перемещения акустического блока
0 выполнен в виде шарнирно-рычажной системы из двух пар телескопических рычагов, установленных с возможностью поворота в вертикальной плоскости за счет связи планок через пружины, соединенные с тягами,
5 на одной из которых закреплен опорный элемент, жестко связанный с соответствующей планкой, планки соединяют рычаги с тросами канатной передачи, корпус выполнен в виде каретки, установленной на направляющих, держатель акустического
блока установлен с возможностью вертикального перемещения посредством связи с основаниями поворотных рычагов и подвижно соединен через направляющие штыри с корпусом устройства, тормозная колодка механизма для координации перемещений контактирует с направляющими каретки, один из датчиков положения установлен на опорном элементе шарнирно-ры
чажной системы, а соответствующий ему конечный выключатель закреплен на связанной с пружиной тяге, на которой укреплен опорный элемент, а два другие датчика положения закреплены на каретке напротив направляющих штырей держателя акустического блока, один из которых служит конечным выключателем этих датчиков.
| Акустическое устройство для контроля сварных соединений изделий | 1981 |
|
SU1101728A1 |
