Изобретение относится к транспорту и может быть использовано для перемещения грузов и материалов в метзплургии, литейном производстве и других отраслях народного хозяйства.
Цель изобретения - повышение эксплуатационной надежности путзм исключения влияния пробуксовки ведомой колесной пары.
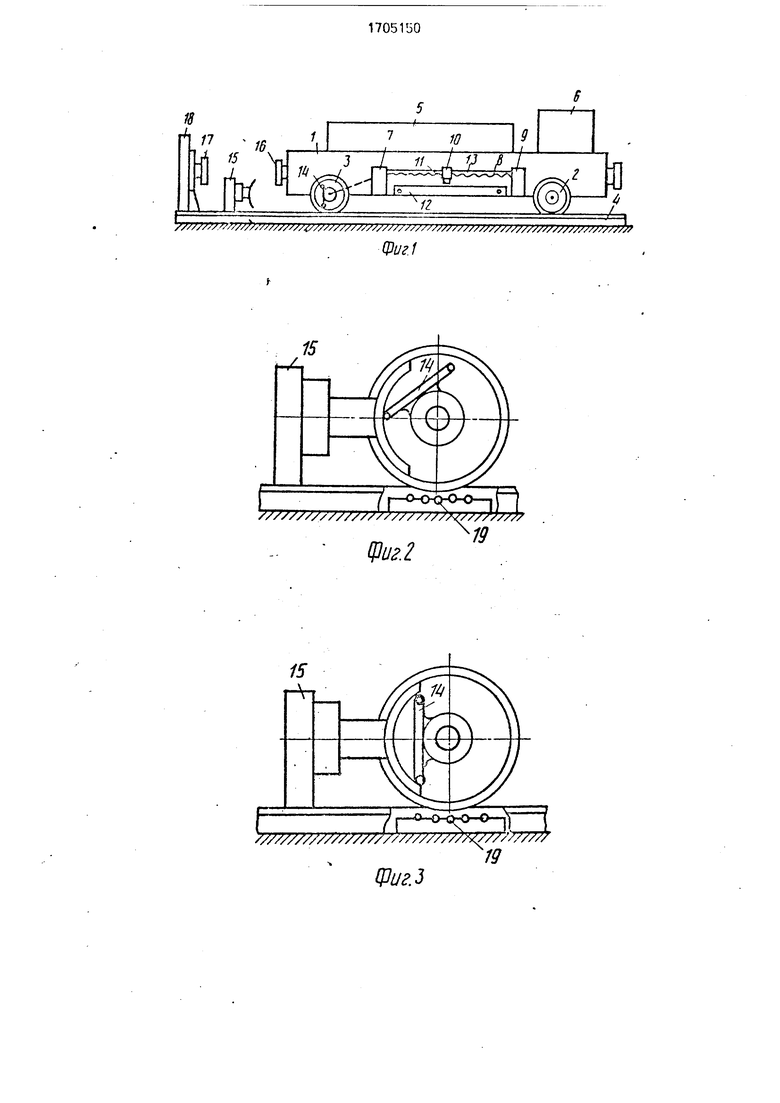
На фиг. 1 приведена система позиционирования; на фиг. 2 - положение ведомой колесной пэры п.м./; наезде на упор; на фиг, 3 - то же после поезда на упор; на фиг. -1 - Функциональная схема устройства позицмо- нирозанич.
Устройстпо содержит платформу 1 с пе- дущей и ведомой колесными плр.ами 2 и 3, устзисалочную ;.л рельссмюм пути На платформе 1 устлно лен грулоприомиый элемент 5 и при.-.д Г ходл телочки, соединенный с ведущей колесной парой 2. Ось ведомой колесной пары 3 механически связана (показано пунктирной линией) через редуктор 7 с ходовым винтом 8, второй конец которого шарнирно укреплен п опоре 9. На гайке 10 ВИНТОЕЮЙ передачи укреплена информационная головка 11 датчика линейных перемещений, линейка 12 которого ус- тановленя на платформе 1. Через отверстие в гайке 10 пропущена направляющая 13. Голопкз 11.и линс-йк) 12 выполняют функцию измерителя линейных перемещений.
Ось ведомой колесной пары снабжена пластиной 14с роликами нз концах, взаимодействующей с механическим подпружиненным упором 15, установленным на ОСНОГ-С1НИИ. Кроме того, платформа 1 снабжена буфером 16, сзоимодейстпующим о крг.йнегл положении тележки с буфером 17, установленным на упоре 18. Перед упором
VJ
О
(Л
ел о
15 под рольсями укреплены ролики 19, предназначенные для подъема ведомой колесной пари 3 с целью облегчения ее поворота покруг оси при озгимодсйстнии пластины 14 с упором-15.
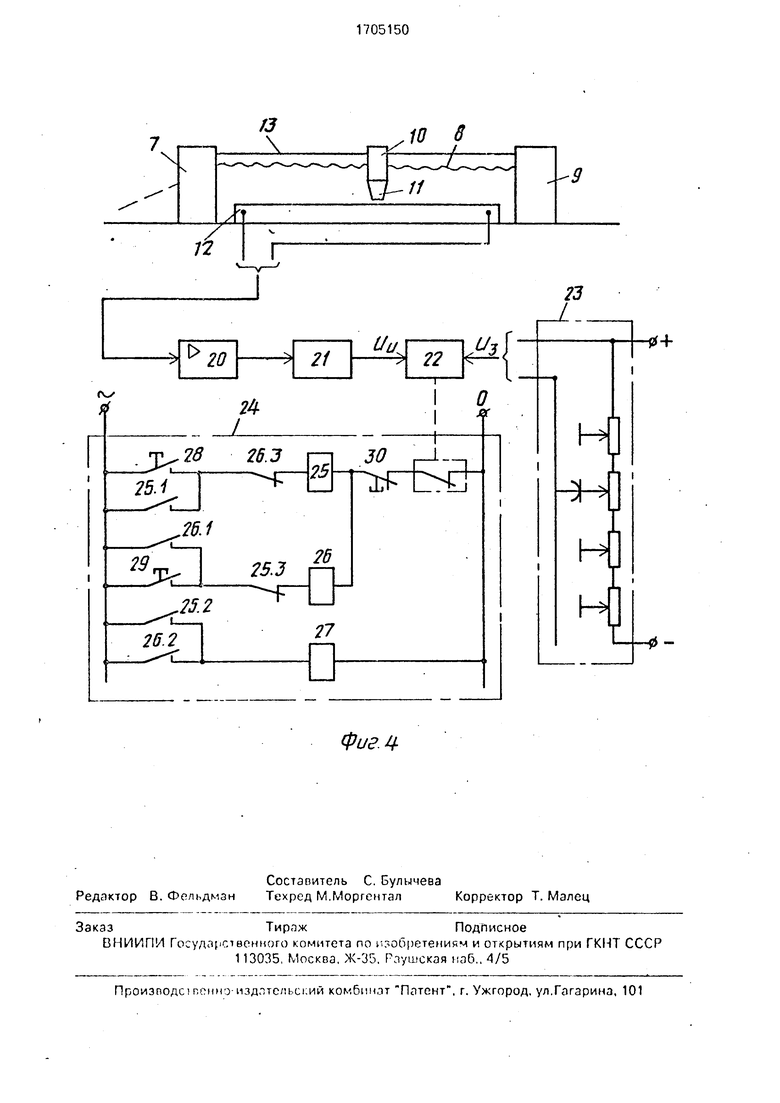
Информационный выход измерителя линейных перемещений подг-пючен к усилителю 20, выход которого чероз демодулятор 21 соединен с первым входом нуль-органа 22. второй вход которого соединен с выхо- дом задатчикз 23. Нормально закрытый контакт исполнительного элемштэ нуль-органа
22 включен в схему блока 24 управления приводом хода тележки, содержащего пускатели 25 и 26 с контактами 25.1, 25. 2, 25.3 и26.1,26.2, 26.3, электромагнит тормоза 27, кнопки 28. 29, 30,
Система позиционирования работает следующим образом.
В исходном положении тележка нахо- дится в крайнем правом положении. Информационная головка.11, укрепленная на гайке 10, также находится относительно линейки 12 в крайнем правом положении. При этом . Выходной сигнал Уз задатчика
23 устанавливают равным сигналу Uu. соответствующему заданному месту остановки тележки на пути следования. При нажатии кнопки 28 с блоке 24 управления срабатывает пускатель 25, включается привод 6 и тележка перемещается влево. Одновременно гайка 10 с информационной головкой 11 перемещается относительно линейки 12 за счет вращения ходового винта 8, связанного через редуктор 7 с осью ведомой колес- ной пары 3. По мере движения тележки влево сигнал Uu растет и при срабатывает исполнительный элемент нуль-органа .22, контакт размыкается в цепи пускателя 25, привод 6 теряет питание и тележка останаоливзется. Изменяя величину сигнала Уз с помощью переключателя в блоке 23, можно остановить тележку в любом месте на участке ее дьижения. Максимальная величина сигнала Uu соответствует крайнему левому положению тележки и информационной головки 11 относительно ли- нейки 12. При нажатии кнопки 29 срабатывает пускатель 26 и теленка движется вправо. Остановка тележки в задан- ном месте осуществляется аналогично описанному выше, либо кнопкой 30.
Таким образом, выходной сигнал датчика 11 линейных перемещении пропорционален пути S, пройденному тележкой на контролируемом участке, причем информация будет достоверна при условии отсутствия пробуксовки ведомой колесной пары 3. Как показали эксперименты, пробуксовка ведомой колесной пары 3 в течение одного цикла незначительна и ею можно пренебречь. Однако за несколько циклов ошибка может накапливаться, что приводит к нарушению зависимости (S), следовательно, к снижению точности остановки тележки в заданном месте. Для исключения влияния пробуксовки ведомой колесной Пары 3 на точность остановки тележки в каждом цикле в крайнем левом положении пластина 14 взаимодействует с упором 15, за счет чего колеса ведомой пары 3 проворачиваются вокруг оси при неподвижной тележке (см. фиг. 1 б. в). Для облегчения вращения колес возле упора 15 они своими ребордами наезжают на ролики 19, в результате чего образуется зазор между колесами и рельсами. Поворот колес происходит до момента, когда пластина 14 займет вертикальное положение. Эта операция происходит автоматически в каждом цикле, что позволяет стабилизировать функцию (S), а следовательно, исключить влияние пробуксовки ведомой колесной пары на точность остановки тележки.
Форму л а изо бретен и я Система позиционирования, включающая ограниченный механическими упорами участок рельсового пути и самоходную тележку, содержащую платформу и по крайней мере одну ведомую колесную пару, привод хода, устройство позиционирования с датчиком положения и блок управления, отличающаяся тем, что, с целью повышения точности позиционирования путем исключения влияния пробуксовки ведомой колесной пары, датчик положения выполнен в виде пары тайка-винт, винт механически связан с осью ведомой колесной пары, а гайка установлена на винте с возможностью вращения, причем на оси ведомой колесной пары и перпендикулярно ей закреплена пластина с роликами на концах для взаимодействия с упором.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| Система рулевого управления транспортного средства | 1983 |
|
SU1158430A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Устройство для управления реверсивным электродвигателем строительного подъемника | 1978 |
|
SU753760A1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2021 |
|
RU2790940C1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2023 |
|
RU2813217C1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПРОФИЛЯ ТЕМПЕРАТУРЫ ЛЕНТЫ РАСПЛАВЛЕННОГО ИЛИ НАГРЕТОГО ВЕЩЕСТВА | 1991 |
|
RU2024825C1 |
| МОСТОВОЙ АГРЕГАТ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 1992 |
|
RU2057416C1 |
Изобретение относится к транспорту и может быть использовано для перемещения грузов и материалов в металлургии, литейном производстве и других отраслях народного хозяйства. Цель изобретения - повышение точности позиционирования путем исключения влияния пробуксовки ведомой колесной пары. Система позиционирования включает ограниченный механическими упорами участок рельсового пути и самоходную тележку, содержащую платформу 1 и по крайней мере одну ведомую колесную пару 3, привод хода, устройство позиционирования с датчиком положения и блок управления, датч ик положения выполнен в виде пары из гайки 10 и винта 8, причем винт 8 механически связан с осью ведомой колесной пары 3, гайка установлена на винте с возможностью ираще- ния, а на оси ведомой колесной пары и перпендикулярно ей закреплена пластина 14 с роликами на концах для взаимодействия с упором 15. 4 ил.
//S/////Sss//////////S////6f////////S///////////////////////////////////SS/S///SS/ir7/7/Sr
/
15
I
//////////////// ////////// //// //////
19
(Риг. 2
19
Риг.З
19
/J
(ЧУ #
2Ь
Фи г. Ц10 8
| Устройство для определения веса груза мостового крана | 1985 |
|
SU1299947A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
