(54) УСТРОЙСТВО ДЛЯ СНЯТИЯ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ ЛИНЕЙНОГО ЭЛЕКТРОДВИГАТЕЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для снятия механической характеристики линейного электродвигателя | 1981 |
|
SU954905A2 |
| НАГРУЖАЮЩИЙ МЕХАНИЗМ СТЕНДА ДЛЯ ИСПЫТАНИЙ ТРОСОВОГО ПРИВОДА | 2016 |
|
RU2649216C1 |
| Инерционный конвейер | 1986 |
|
SU1400983A1 |
| Устройство для снятия механической характеристики линейного электродвигателя | 1977 |
|
SU634126A1 |
| Инерционный конвейер | 1985 |
|
SU1265111A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЗАЦИЕЙ ПУСКО-ТОРМОЗНЫХ РЕЖИМОВ ДРОССЕЛЬНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2311725C1 |
| Устройство для намотки нити набОбиНу | 1978 |
|
SU815092A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2025035C1 |
| Вибрационный конвейер | 1986 |
|
SU1630999A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЯГОВОГО ОРГАНА САМОДЕЙСТВУЮЩЕГО КОНВЕЙЕРА | 1992 |
|
RU2061636C1 |
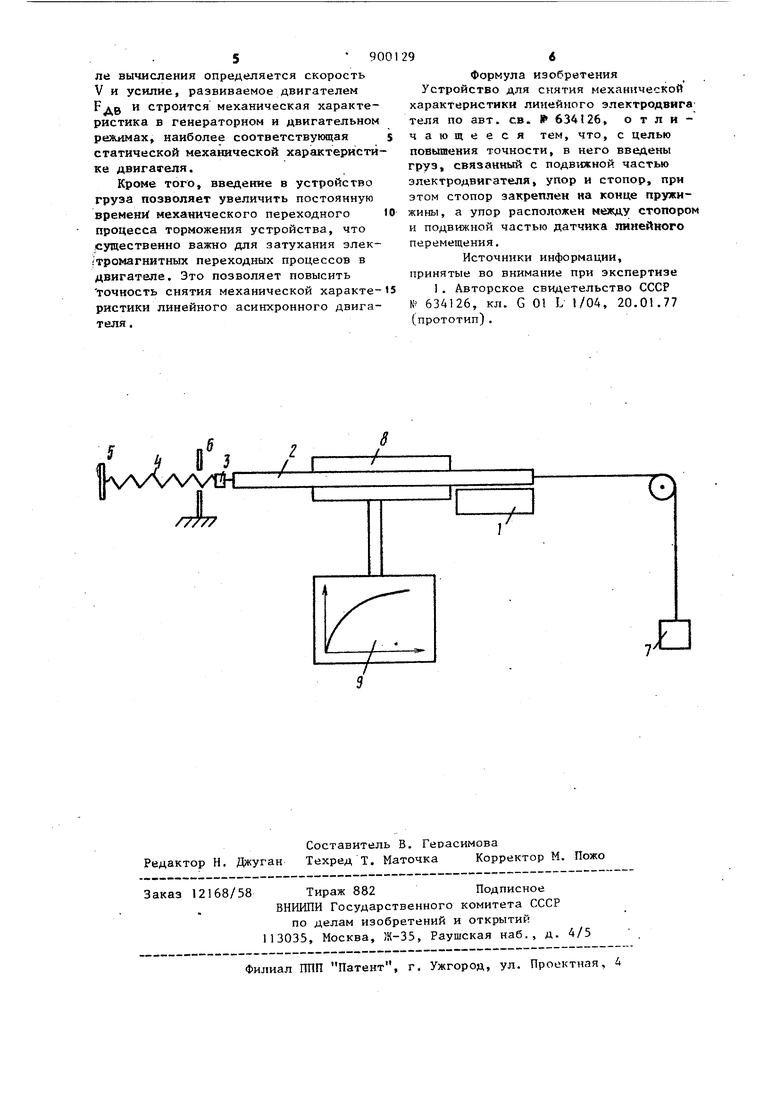
Иэобретйние относится к приборост роению и может быть использовано для определения механических характеристик линейных асинхронных двигателей. По основному авт. св. № 634126 известно устройство для снятия механической характеристики линейного электродвигателя, содержащее подвижную часть, связанную с электродвигателем, датчик линейного перемещения с регистрирукяцим устройством и пружиной, один конец которой закреплен неподвижно, а другой жестко связан с подвижной частьюСУу. Недостатком известного устройства является невысокая точность снятия механической характеристики линейного двигателя, обусловленная тем, что при снятии механическойохарактеристи ки подвижная часть электродвигателя не может достичь скорости, близкой к синхронной, так как по мере ускорения подвижной части увеличивается тор мозное усилие пружины. Поэтому экспериментально снимается только часть механической характеристики в двигательном режиме. Кроме того, механи.ческая характеристика искажается за счет заметного влияния электромагнитных переходных процессов в электродвигателе. Цель изобретения - повышение точности. Указанная цель достигается за счет того, что в устройство введены груз, связанный с подвижной частью электродвигателя, упор и стопор, при этом стопор закреплен на конце пружины, а упор расположен между стопором и подвижной частью датчика линейного перемещения. На чертеже изображена схема устройства . Исследуемый линейный синхронный двигатель состоит из индуктора 1 и подвижной части 2,связанной с подвижной частью 3 устройства,соединенной с одним Э9 концом пружины 4«на другом конце которо закреплен стопор 5. Пружина 4 свобод но проходит через упор 6,расположенный между стопором 5 и подвижной частью 3 устройства. Другой конец подвижной части линейного асинхронного двигате ля 2 соединен с грузом 7, подвешенны через блок. Перемещение подвижной части устройства 3 измеряется датчиком линейных перемещий 8, который электрически связан с регистрирующим устройством 9. Устройство работает следующим образом. В исходном положении подвижная часть 2 двигателя находится в неподвижном состоянии. Стопор 5 находится на некотором расстоянии от упора 6, достаточном для разгона вторичной ча ти двигателя до требуемой скорости. Пружина 4 не подвергнута деформации. Сила притяжения груза 7 совпадает с направлением силы тяги двигателя. При подключении и щуктора 1 двига теля к питающей сети, его подвижная часть приходит в движение и ускоряется под действием усилия, развиваемого двигателем и силой тяжести груза 7, до скорости, превышающей синхронную скорость. После затухания колебаний скорости и усилия, развиваемы двигателем, в конце пути ускорения подвижная часть 2 двигателя имеет постоянную стабильную скорость, определяемую равенством сил FAQ Р, где Рдд - усилие, развиваемое двигателем при скорости V ка статической механической характеристике двигателя в генераторном режиме и направленное против направления движения подвижной части. После установления постоянной скорости V подвшкной части двигателя сто пор 5 достигает упора 6 и второй конец пружины 4 фиксируется неподвижно Подвижная часть 2 двигателя начинает растягивать пружину 4. В начальный момент сила сопротивления пружины 4 мала, поэтому медленно уменьшается скорость подвшкной части 2 двигателя что исключает возникновение переходны электромагнитных усилий на двигателе, так как изменение токов двигателя не отстает от изменения скорости подвижной части двигателя. Растягивание пружины 4 происходит за счет силы тяги двигателя и груза 7, поэтому при одной и той же пружине 94 ее растяжение х больше, чем при растягивании пружины только силой тяги двигателя, Вследствие чего в процессе торможения подвижной части 2 пружиной 4 скорость изменяется медленно. Следовательно, экспериментально снимаемая механическая характеристика и в двигательном режиме соответствует статической механической характеристике двигателя. Растягивание пружины 4 фиксируется датчиком линейного перемещения 8 который вырабатывает сигнал, пропор1щональный величине перемещения х подвижной части 2 двигателя. Это перемещение одновременно пропорционально силе сопротивления пружины 4, противодействующей тяге двигателя и ве су груза 7. Изменение сигнала датчика 8 во времени фиксируется регистрир.ующим устройством на носитель, перемещающийся с постоянной скоростью. Однократное дифференцирование этой кривой дает скорость, а двукратное - ускорение. Усилие, развиваемое двигателем, определяется по формуле - (т + т) F F а - , АВ пр где F - усилие, развиваемое двигателем при скорости V; F К X - сила сопротивления ПР .. -.пружины; К - коэффициент жесткости пружины;X - растяжение пружины; m - масса подвижной части; т,2 - масса груза, а - ускорение подвижной части; g - ускорение свободного падения тела. Введение в устройство стопора, упора и груза позволяет разгонять подвижную часть двигателя до требуемой сверхсинхронной скорости, которая является постоянной и определяется равенством Рд0 Р. Поэтому на этой скорости полностью затухают п реходные электромагнитные процессы, связанные с включением двигателя, и разгоном, подвижной части двигателя. Начиная с этой постоянной скорости подвижная часть двигателя плавно тормозится пружиной. По сигналу перемещения пос5900
ле вычисления определяется скорость V и усилие, развиваемое двигателем Рдр и строится механическая характеристика в генераторном и двигательном режимах, наиболее соответствующая s статической механической характеристике двигателя.
Кроме того, введение в устройство груза позволяет увеличить постоянную времени механического переходного to процесса торможения устройства, что существенно важно для затухания элек(тромагнитных переходных процессов в двигателе. Это позволяет повысить точность снятия механической характе-15 ристики линейного асинхронного двигателя .
/ Г
| л/VVVVt H
296
Формула изобретения Устройство для снятия механической характеристики линейного электродвига теля по авт. св. № 634126, отличающееся тем, что, с целью повышения точности, в него введены груз, связанный с подвижной частью электродвигателя, упор и стопор, при этом стопор закреплен на конце пружижины, а упор расположен между стопоро и подвижной частью датчика линейного перемещения.
Источники информации, принятые во внимание при экспертизе
+
