Изобретение относится к области измерительной техники и может быть использовано для измерения кажущегося ускорения в системах стабилизации, ориентации и навигации подвижных объектов и путеизмерительных комплексах.
Для управления движением летательного аппарата используется информация о векторе кажущегося ускорения. В этом случае в неизбыточном варианте необходимо реализовать на летательном аппарате измерительный базис, образуемый системой трех векторов, связанных с осями чувствительности одностепенных акселерометров. Для повышения точности и надежности работы систем управления летательными аппаратами широко применяют измерительные комплексы с избыточным числом акселерометров, где резервируют как каналы управления в целом, так и измерители - акселерометры. Известно использование малогабаритных БИНС с «грубыми» чувствительными элементами [1, 2, 3].
Основное внимание в этих патентах уделено представлению преимуществ по сравнению с обычными традиционными блоками чувствительных элементов, основанных на использовании внешних источников навигационной информации (типа GPS), использовании демпфирования ошибок вычислительной платформы и т.д. Основным недостатком данных систем является невозможность длительного автономного режима при отключении спутниковой навигационной системы (СНС), что принципиально важно при постановке искусственных помех.
Известен инерциальный измерительный блок, в котором в качестве акселерометров применены микромеханические акселерометры, при этом основание блока выполнено в виде параллелепипеда с базовыми плоскостями по его граням и внутренней полостью, а основание закреплено на подложке, содержащей микросборки сервисной электроники, в полости основания размещен источник постоянного тока, а на одной из плоскостей основания установлен датчик температуры [4]. Недостатками данного инерциального блока являются ограничения по количеству используемых акселерометров тремя. Оси чувствительности направлены перпендикулярно базовым плоскостям основания параллелепипеда, в связи с чем отсутствует возможность резервирования датчиков параметров навигации. Устранение этих недостатков средствами прототипа ведет к увеличению габаритов блока и уменьшению точности и надежности измерений.
Известен универсальный навигационный прибор содержащий защитный корпус с выводами, в котором размещены интегрированная бесплатформенная инерциальная навигационная система с датчиками линейных ускорений. Каждый датчик линейных ускорений - это плата, на которой смонтировано по одному микромеханическому акселерометру. По меньшей мере, два датчика линейных ускорений установлены перпендикулярно к плате чувствительных элементов и жестко скреплены с ней. Причем, датчики линейных ускорений расположены так, что оси чувствительности микромеханических акселерометров перпендикулярны друг к другу [5]. Недостатком известного устройства является сложность конструкции, высокий уровень шумов датчиков ускорения и измерительных шумов, сложность алгоритмов обработки информации, влияющих на точность определения трех компонент вектора кажущегося ускорения.
Наиболее близким по технической сущности является микромеханический инерциальный измерительный модуль, содержащий корпус, включающий основание и крышку, плату питания и настройки, плату преобразователей линейного ускорения, содержащую электронный блок обработки информации и коммутационную плату, первый и второй микромеханические акселерометры [6].
Недостатком этих устройств является существенная зависимость выходного сигнала датчика ускорения от воздействия вибрационных ускорений, а также временной и температурный дрейф нуля датчика и значительный собственный шум, свойственный всем МЭМС-датчикам ускорения.
Задачей, на которую направлено изобретение, является уменьшение шумовой составляющей и дрейфа нуля устройства, тем самым, снижая порог чувствительности и повышая точность устройства. Поставленная задача решается за счет того, что в устройстве для измерения ускорения, согласно изобретению, используют n микромеханических акселерометров, которые механически жестко закреплены на одном основании, оси чувствительности всех n микромеханических акселерометров параллельны оси чувствительности датчика, выход каждого микромеханического акселерометра соединен с соответствующим входом сумматора, выходной сигнал сумматора поступает на вход аттенюатора с регулируемым коэффициентом ослабления, равным количеству микромеханических акселерометров или чувствительные элементы микромеханических акселерометров выполнены и закреплены в виде многоуровневых монокристальных модулей, для каждого чувствительного элемента введены электронные преобразователи, дополнительно введены вычислитель медианы, цифровой сумматор, датчик температуры, микропроцессорный вычислитель и последовательно соединенные цифровой фильтр и последовательный интерфейс, выходы каждого электронного преобразователя ускорений соединены со входами аналого-цифрового преобразователя, выходы которого соединены со входами вычислителя медианы, выход которого соединён с четвертым входом цифрового сумматора, причём выходы цифрового сумматора соединены с первым, вторым и третьим информационными входами микропроцессорного вычислителя, выходы датчиков температуры соединены со входами микропроцессорного вычислителя, выход которого соединен со входом цифрового фильтра.
Признаками, отличающими заявляемое устройство от известных является то, что используют n микромеханических акселерометров, которые механически жестко закреплены на одном основании, оси чувствительности всех n микромеханических акселерометров параллельны оси чувствительности датчика, выход каждого микромеханического акселерометра соединен с соответствующим входом сумматора, выходной сигнал сумматора поступает на вход аттенюатора с регулируемым коэффициентом ослабления, равным количеству микромеханических акселерометров.
Другой вариант: чувствительные элементы микромеханических акселерометров закреплены в виде многоуровневых монокристальных модулей. Имеет большое значение, что для каждого чувствительного элемента введены электронные преобразователи, дополнительно введены вычислитель медианы, цифровой сумматор, датчик температуры, микропроцессорный вычислитель и последовательно соединенные цифровой фильтр и последовательный интерфейс, выходы каждого электронного преобразователя ускорений соединены с первым, вторым и третьим входами цифрового сумматора и с входами вычислителя медианы, выход которого соединен с четвертым входом цифрового сумматора, причем выходы цифрового сумматора соединены с первым, вторым и третьим информационными входами микропроцессорного вычислителя, выход которого соединен с входом цифрового фильтра.
Таким образом, в устройстве используют n одинаковых микромеханических акселерометров, которые механически жестко закреплены на одном основании. Тем самым обеспечивается измерение одного и того же линейного ускорения одинаковыми датчиками с дрейфом нуля и шумовой составляющей. Измеренный сигнал с каждого датчика передается на соответствующий вход сумматора. С сумматора данные поступают на вход аттенюатора с регулируемым коэффициентом ослабления. Аттенюатор предназначен для ослабления выходного сигнала сумматора в n раз. Регулируемым потому, что в канале измерения могут использоваться от двух и более датчиков. Это определяется конкретными задачами использования предлагаемого устройства. Оптимальное количество используемых датчиков предлагается таким, чтобы существенно не усложнять трассировку выходов датчиков для дальнейшей обработки сигнала.
Чувствительные элементы микромеханических акселерометров выполнены и закреплены в виде многоуровневых монокристальных модулей. Для каждого чувствительного элемента введены электронные преобразователи, дополнительно введены вычислитель медианы, цифровой сумматор, датчик температуры, микропроцессорный вычислитель и последовательно соединенные цифровой фильтр и последовательный интерфейс. Выходы каждого электронного преобразователя ускорений соединены с первым, вторым и третьим входами цифрового сумматора и с входами вычислителя медианы, выход которого соединен с четвертым входом цифрового сумматора, причем выходы цифрового сумматора соединены с первым, вторым и третьим информационными входами микропроцессорного вычислителя, выход которого соединен с входом цифрового фильтра.
Чувствительные элементы (ЧЭ) закреплены друг над другом. Причем, закреплены по внешней рамке, обеспечивая жесткую связь между собой. Именно выполнение чувствительных элементов микромеханических акселерометров в виде многоуровневых монокристальных модулей обеспечивает существенное уменьшение габаритов устройства. Жесткое закрепление ЧЭ друг над другом обеспечивает высокую надежность и одинаковое воздействие измеряемого параметра и внешних воздействий. Трассировка с каждого ЧЭ осуществляется для каждого электронного преобразователя, сформированных на отдельной плате. Цифровой микропроцессорный вычислитель осуществляет прием данных о температуре с датчика температуры и значений линейного ускорения с устройства для измерений линейных ускорений.
Наличие данных о температуре, поступающих с датчика температуры, позволяет компенсировать температурные уходы нулей датчиков из составляющей измеренных ускорений. В системах управления, где время измерения мало, порог чувствительности ограничивается шумом датчика. В навигационных системах, где величину перемещения находят путем интегрирования ускорения, порог чувствительности ограничивается дрейфом нуля. Для обеспечения функционирования указанных технических систем порог чувствительности датчиков линейных ускорений должен быть меньше нижней границы диапазона их рабочих ускорений, поэтому понижение порога чувствительности датчиков ускорения является актуальной технической задачей.
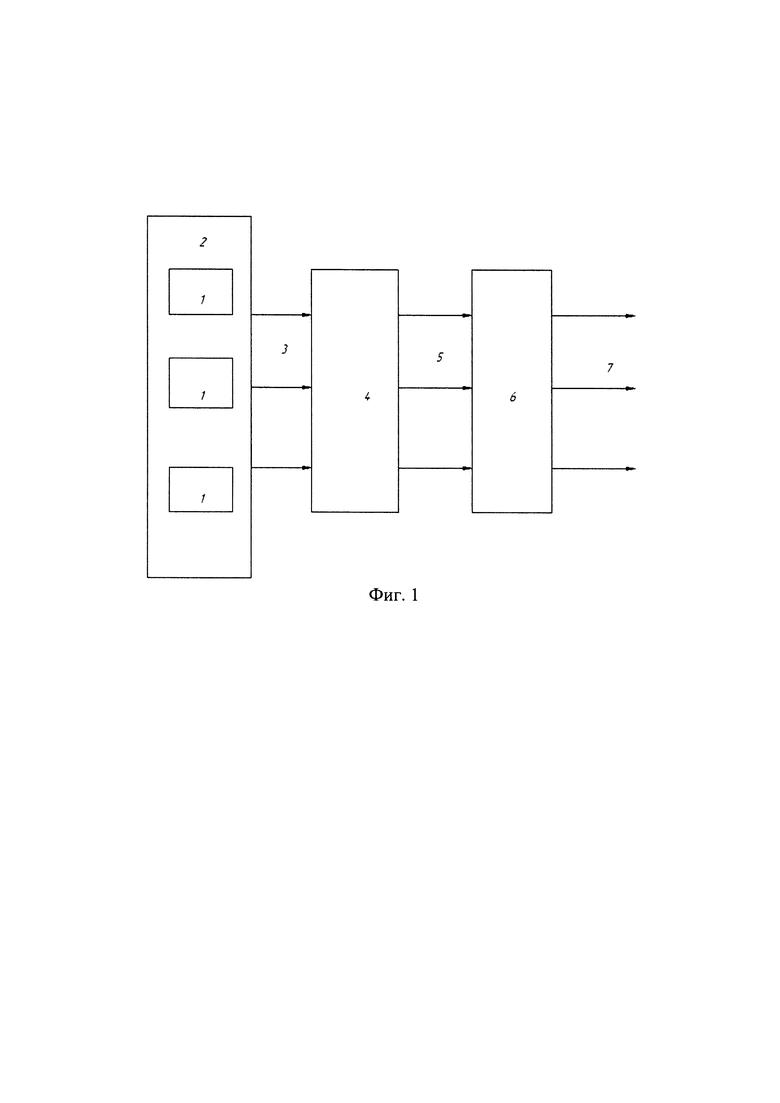
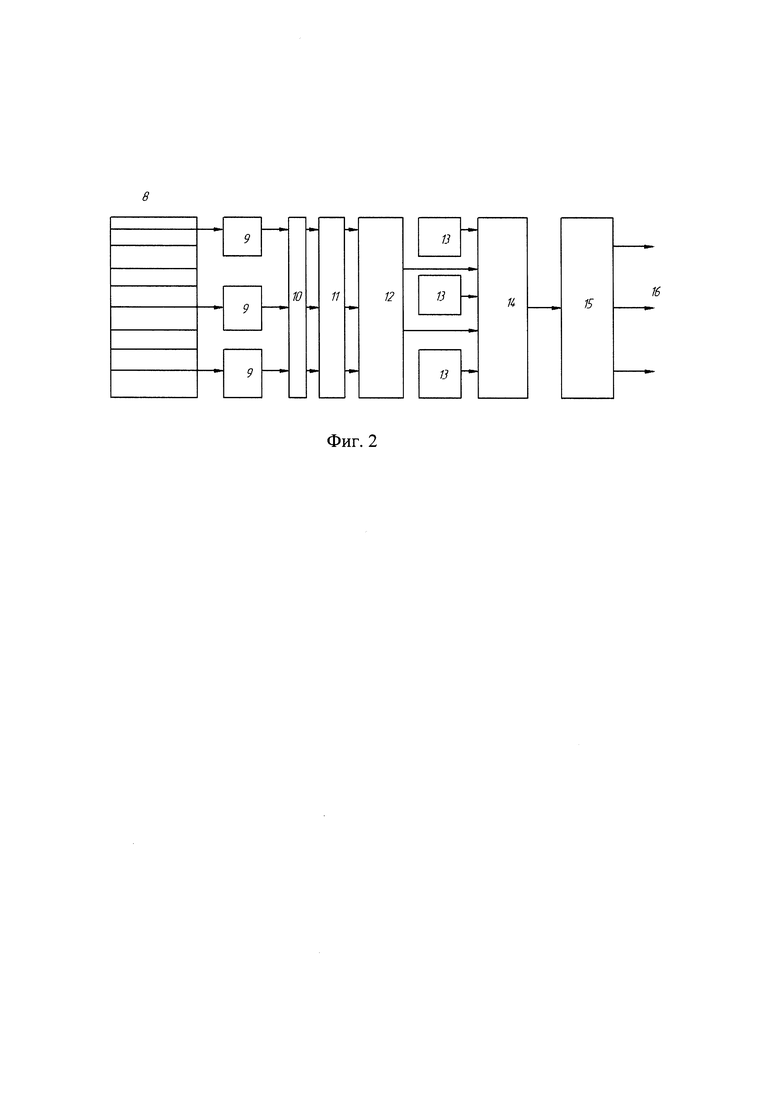
На фиг. 1, 2 представлена структурно-функциональная схема устройства для измерения линейного ускорения на базе нескольких микромеханических акселерометров, где:
1 - микромеханические акселерометры,
2 - жесткое основание,
3 - линии связи передачи данных от микромеханических акселерометров,
4 - сумматор,
5 - линии связи передачи данных от сумматора в управляемый аттенюатор,
6 - управляемый аттенюатор,
7 - линии связи для передачи информации,
8 - многоуровневый многокристальный (монокристальный) модуль.
9 - электронные преобразователи,
10 - аналого-цифровой преобразователь,
11 - вычислитель медианы,
12 - цифровой сумматор,
13 - датчики температуры,
14 - микропроцессор,
15 - микроконтроллер,
16 - встроенный цифровой интерфейс микроконтроллера.
Устройство для измерения ускорения содержит n микромеханических акселерометров 1, жесткое основание 2, n линий связи передачи данных 3, сумматор 4, линии связи передачи данных 5 от сумматора в управляемый аттенюатор 6, линии связи для передачи информации 7.
Выход каждого микромеханического акселерометра 1 связан с соответствующим входом сумматора 4 через соответствующую линию связи передачи данных 3, выход сумматора 4 линией связи передачи данных 5 связан с входом управляемого аттенюатора 6, выход аттенюатора 6 связан линией связи для передачи информации 7. Устройство для измерения ускорения работает следующим образом. Каждый микромеханический акселерометр 1 измеряет текущее значение ускорения и по линии связи передачи данных 3 передает это значение в сумматор 4. С сумматора 4 данные поступают по линии связи 5 на вход управляемого аттенюатора 6 с коэффициентом ослабления, равным количеству микромеханических акселерометров 1, который уменьшает выходной сигнал сумматора в n раз. На выход управляемого аттенюатора 6 поступает среднее значение ускорения а от измеренных величин a1, а2, …, an согласно:

и передается по линии связи для передачи информации 7.
где a1, а2, …, an - текущее ускорение, измеренное микромеханическими акселерометрами 1,
n - количество микромеханических акселерометров,
а - среднее значение ускорения.
Шумы разных микромеханических акселерометров, находящихся в одинаковых условиях, являются некоррелированными случайными процессами. Таким образом, дрейфы нуля разных микромеханических акселерометров тоже являются некоррелированными случайными процессами. Поэтому среднее значение ускорения а будет иметь шумовую составляющую и дрейф нуля, уменьшенные в корень квадратный из n раз.
Другой вариант.
Устройство измерения ускорения содержит чувствительные элементы микромеханических акселерометров, которые выполнены и закреплены в виде многоуровневых монокристальных модулей 8. Для каждого чувствительного элемента введены электронные преобразователи 9. Дополнительно введены вычислитель медианы 11, цифровой сумматор 12, датчик температуры 13, микропроцессорный вычислитель 14 и последовательно соединенные цифровой фильтр на основе микроконтроллера 15 и последовательный интерфейс. Выходы каждого электронного преобразователя ускорений 9 соединены с первым, вторым и третьим входами цифрового сумматора 12 и с входами вычислителя медианы 11, выход которого соединен с четвертым входом цифрового сумматора 12, причем выходы цифрового сумматора 12 соединены с первым, вторым и третьим информационными входами микропроцессорного вычислителя 14, выход которого соединен с входом цифрового фильтра на основе микроконтроллера 15. Инерциальный измерительный модуль работает следующим образом. Измеренный сигнал с каждого ЧЭ многоуровневого монокристального модуля поступает на электронные преобразователи 9, соответствующие каждому ЧЭ. Датчики установлены попарно на общем базовом основании. Сигналы с электронных преобразователей 9 поступают на многоканальный аналого-цифровой преобразователь 10, который осуществляет оцифровку выходных аналоговых сигналов с электронных преобразователей 9 и передает их в вычислитель медианы 11 и одновременно на три входа цифрового сумматора 12. Вычисление реализуется программным методом на микропроцессорном вычислителе 14, вычисленное значение медианы поступает на четвертый вход цифрового сумматора 12.
Цифровой микропроцессорный вычислитель 14 осуществляет прием данных о температуре с датчика 13.
Наличие данных о температуре, поступающих с датчика температуры 13, позволяет компенсировать температурные уходы нулей датчиков из составляющей ускорения.
Цифровой фильтр на основе микроконтроллера 15 осуществляет фильтрацию данных с учетом требования к фазочастотным характеристикам (или АЧХ) и выдает их потребителю через последовательный интерфейс 16. Потребитель, в зависимости от условий применения инерциального измерительного модуля, может задавать по двухстороннему цифровому последовательному интерфейсу 16 оптимальную полосу пропускания цифрового фильтра 15.
Избыточное количество датчиков ускорения, датчики температуры, а так же цифровая обработка сигналов измерения микропроцессорным вычислителем позволяет значительно повысить точность инерциального измерительного модуля за счет снижения уходов нулей и собственного углового шума датчиков, так как при суммировании сигналов "n" датчиков крутизна возрастает в "n" раз, а шумы в √"n" раз, что улучшает соотношение "сигнал-шум". Введение температурной компенсации и усреднения данных датчиков позволяет минимизировать уходы нулей выходного сигнала инерциального измерительного модуля.
Источники информации:
1. Патент US №6671648.
2. Патент US №6522992.
3. Патент US №6516283.
4. Патент РФ №2058534.
5. Патент РФ №2263282.
6. Патент РФ №65653 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| Инерциальный измерительный прибор летательного аппарата на микромеханических датчиках и способ повышения его точности | 2015 |
|
RU2615018C1 |
| Инерциальный измерительный преобразователь | 2024 |
|
RU2821240C1 |
| КОМПЛЕКТ ЛАБОРАТОРНОГО ОБОРУДОВАНИЯ ДЛЯ ИЗУЧЕНИЯ ИЗБЫТОЧНОГО БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2024 |
|
RU2817519C1 |
| УСТРОЙСТВО ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2439520C1 |
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| УСТРОЙСТВО ДЛЯ ОПЕРАТИВНОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2010 |
|
RU2439550C1 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2601240C1 |
Изобретение относится к области измерительной техники и может быть использовано для измерения кажущегося ускорения в системах стабилизации, ориентации и навигации подвижных объектов и путеизмерительных комплексах. Сущность первого варианта изобретения заключается в том, что применяют n микромеханических акселерометров, жёстко закреплённых на одном основании, оси чувствительности всех n микромеханических акселерометров параллельны оси чувствительности датчика. При этом выход каждого микромеханического акселерометра соединен с соответствующим входом сумматора, выходной сигнал сумматора поступает на вход аттенюатора с регулируемым коэффициентом ослабления, равным количеству микромеханических акселерометров. Сущность второго варианта изобретения заключается в том, что чувствительные элементы микромеханических акселерометров выполнены в виде многоуровневых монокристальных модулей, для каждого чувствительного элемента введены электронные преобразователи. При этом дополнительно введены вычислитель медианы, цифровой сумматор, датчик температуры, микропроцессорный вычислитель и последовательно соединенные цифровой фильтр и последовательный интерфейс, выходы каждого электронного преобразователя ускорений соединены с входами цифрового сумматора и с входами вычислителя медианы, выход которого соединен с входом цифрового сумматора, причем выходы цифрового сумматора соединены с информационными входами микропроцессорного вычислителя, выход которого соединен с входом цифрового фильтра. Техническим результатом, достигаемым при осуществлении изобретения, является уменьшение шумовой составляющей и дрейфа нуля устройства и, как следствие, снижение порога чувствительности и повышение точности устройства. 2 ил.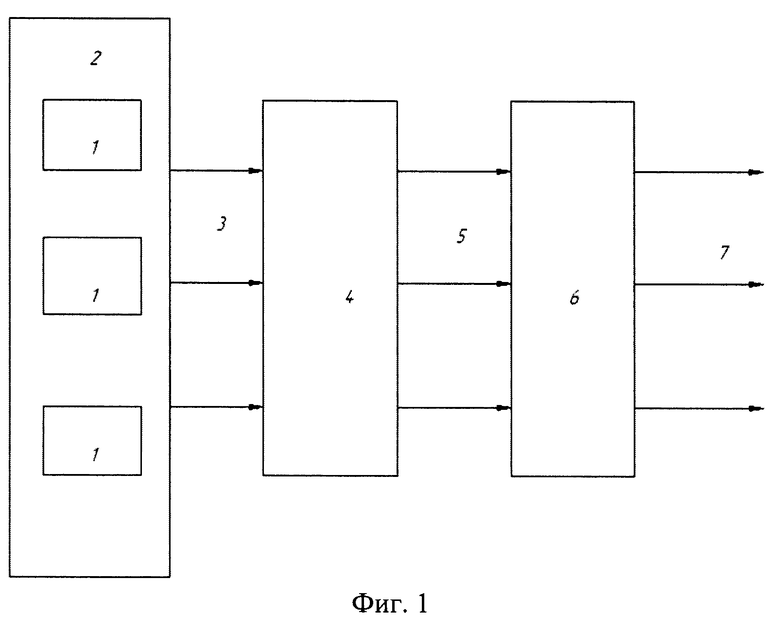
Устройство для измерения ускорения, отличающееся тем, что используют n микромеханических акселерометров, которые механически жестко закреплены на одном основании, оси чувствительности всех n микромеханических акселерометров параллельны оси чувствительности датчика, выход каждого микромеханического акселерометра соединен с соответствующим входом сумматора, выходной сигнал сумматора поступает на вход аттенюатора с регулируемым коэффициентом ослабления, равным количеству микромеханических акселерометров, или чувствительные элементы микромеханических акселерометров выполнены в виде многоуровневых монокристальных модулей, для каждого чувствительного элемента введены электронные преобразователи, дополнительно введены вычислитель медианы, цифровой сумматор, датчик температуры, микропроцессорный вычислитель и последовательно соединенные цифровой фильтр и последовательный интерфейс, выходы каждого электронного преобразователя ускорений соединены с входами аналого-цифрового преобразователя, выходы которого соединены с входами вычислителя медианы, выход которого соединен с четвертым входом цифрового сумматора, причем выходы цифрового сумматора соединены с первым, вторым и третьим информационными входами микропроцессорного вычислителя, выходы датчиков температуры соединены с входами микропроцессорного вычислителя, выход которого соединен с входом цифрового фильтра.
| Бетонный или железобетонный блок (тюбинг) для туннельных обделок | 1944 |
|
SU65653A1 |
| Устройство для измерения ускорений | 2022 |
|
RU2783223C1 |
| АКСЕЛЕРОМЕТР | 2009 |
|
RU2421736C1 |
| DE 102019114996 A1, 10.12.2020 | |||
| CN 103134950 B, 16.07.2014 | |||
| US 20050235751 A1, 27.10.2005. | |||
