силового цилиндра 1 и так. что каждый неподвижный €лок 6 полиспаста вместе с одной из его парных подвижных блоков 10 ориентированы в плоскости, представляющей собой рднь многогранника 13, которым охвачен силовой цилиндр. Причем ветви тягового органа расположены по продольным осям симметрии граней и по продольным ребрам многогранника, второй конец тягового органа 4 закреплен на траверсе 9. Диаметры блоков полиспаста по окружностям запасовки на них тягового органа равны половине ширины грани многогранника. 4 ил.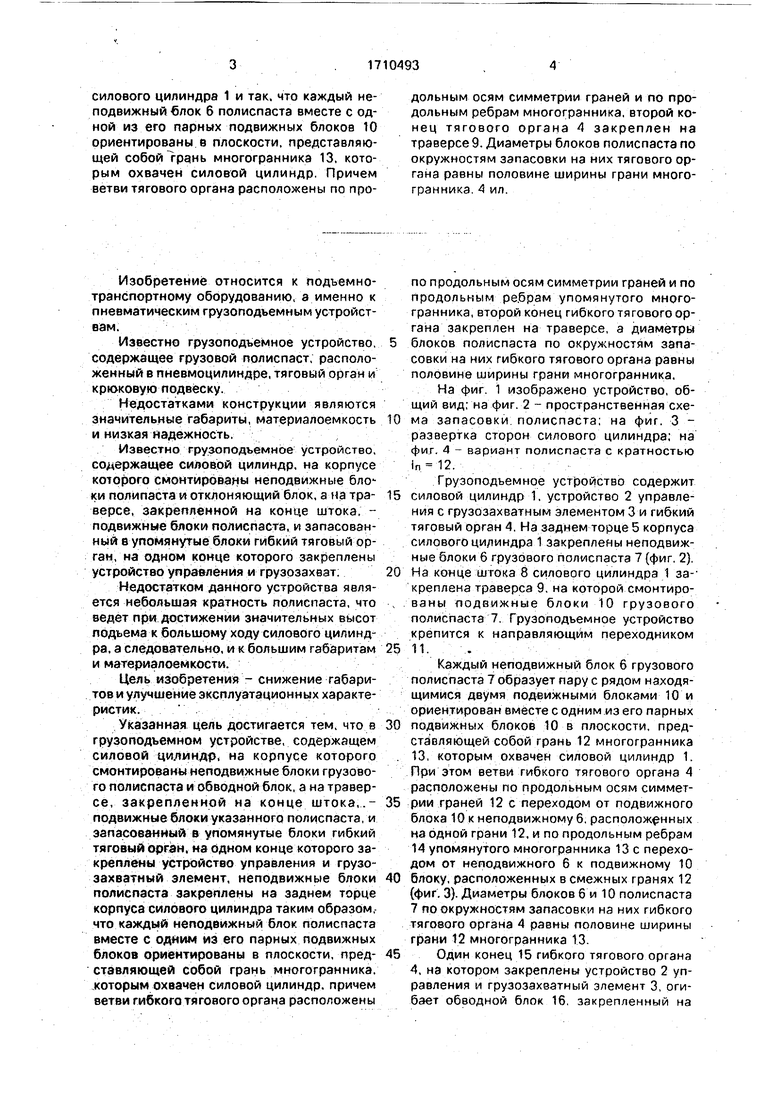
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузовая тележка к кранам мостового типа | 1983 |
|
SU1105448A1 |
| Стенд для испытания стропов | 1990 |
|
SU1779664A1 |
| Полиспастная система грузоподъемного средства | 1986 |
|
SU1421680A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА (ВАРИАНТЫ) | 2001 |
|
RU2195424C2 |
| Подъемное устройство для труб | 1982 |
|
SU1167139A1 |
| Грузоподъемное устройство для монтажа оборудования | 1988 |
|
SU1532528A1 |
| Стреловой кран | 1985 |
|
SU1342869A1 |
| ТРАВЕРСА | 2008 |
|
RU2385282C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ГРУЗА | 2002 |
|
RU2223216C1 |
| Грузоподъемное устройство | 1987 |
|
SU1638099A1 |
Изобретение относится к подъемно- транспортному оборудованию, а именно кпневматическим грузоподъемным устройствам. Цель изобретения - снижение габаритов и улучшение эксплуатационных характеристик. Грузоподъемное устройство содержит силовой цилиндр 1, на корпусе которого смонтированы неподвижные блоки 6 полиспаста 7 и отклоняющий блок 16. а на траверсе 9. закрепленной на конце штока 8. - подвижные блоки 10 полиспаста, и за- пасованный в указанные блоки гибкий тяговый орган 4. на одном конце которого закреплены устройство 2 управления и гру- зозахват 3. Неподвижные блоки 6 полиспаста 1 закреплены на заднем торце корпуса^О4:^ ЮСА>&
Изобретение относится к подъемнотранспортному оборудованию, а именно к пневматическим грузоподъемным устройствам.
Известно грузоподъемное устройство, содержащее грузовой полиспаст, расположенный в пневмоцилиндре, тяговый орган и крю;ковую подвеску.
Недостатками конструкции являются значителъные габариты, материалоемкость и низкая надежность,,
Известно грузоподъемное устройство, содержащее силовой цилиндр, на корпусе которого смонтированы неподвижные блоки полипаста W отклоняющий блок, а на траверсе, закрепленной на конце штока, подвижные блоки полиспаста, и запасованный в упомянутые блоки гибкий тяговый орган, на одном конце которого закреплены устройство управления и грузрзахват;
Недостатком данного устройства является небольшая кратность полиспаста, что ведет при достижении значительных высот подъема к большому ходу силового цилиндра, а следовательно, и к большим габ1аритам и материалоемкости.
Цель изобретения - снижение габаритов и улучшение зксплуатационных характеристик.
Указанная целъ достигается тем, что в грузоподъемном устройстве, содержащем силовой цилиндр( на корпусе которого смонтированы неподвижные блоки грузового полиспаста и обводной блок, а на траверсе, закрепленной на конце штока,.подвижные блоки указанного полиспаста, и запасоеанный в упомянутые блоки гибкий тяговый орган, на Одном конце которого закреплены устройство управления и грузозахватный элемент, неподвижные блоки полиспаста закреплены на заднем торце корпуса силового цилиндра таким образом,что каждый неподвижный блок полиспаста вместе с одним из его парных подвижных блоков ориентированы в плоскости, представляющей собой грань многогранника, жоторым охвачен силовой цилиндр, причем ветви гибкого тягоаого органа расположены
по продольным осям симметрии граней и по продольным ре.брам упомянутого многогранника, второй конец гибкого тягового органа закреплен на траверсе, а диаметры
блоков полиспаста по окружностям запасовки на них гибкого тягового органа равны половине ширины грани многогранника.
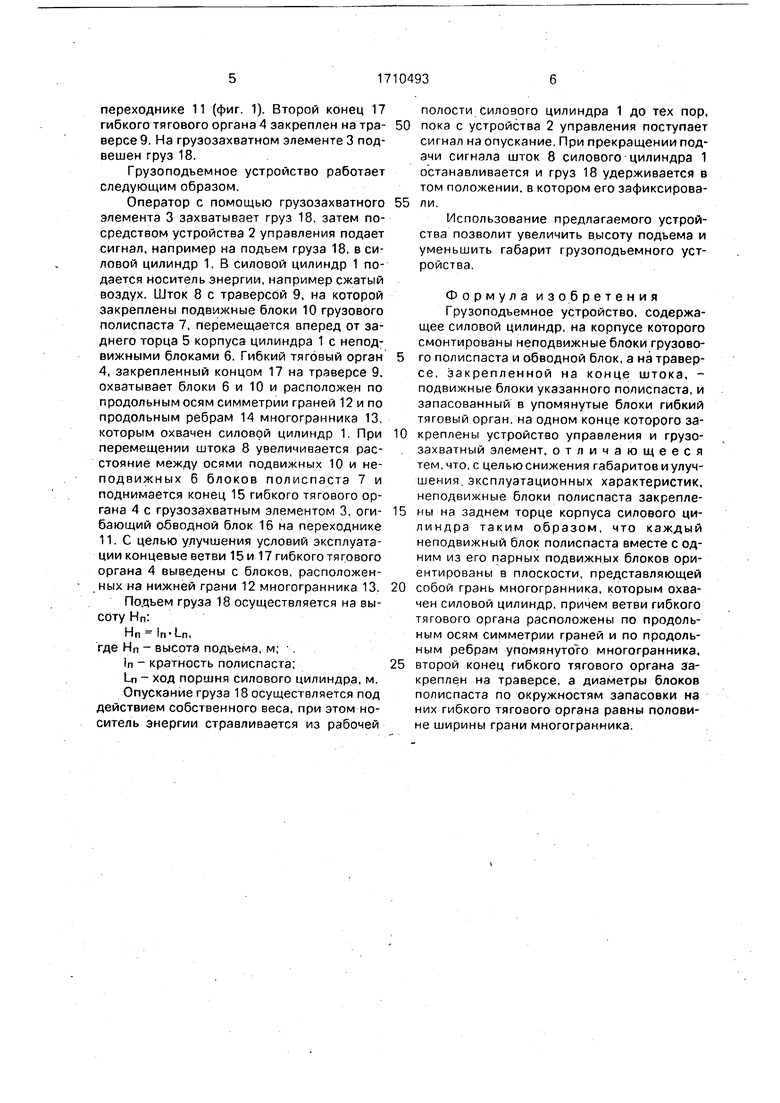
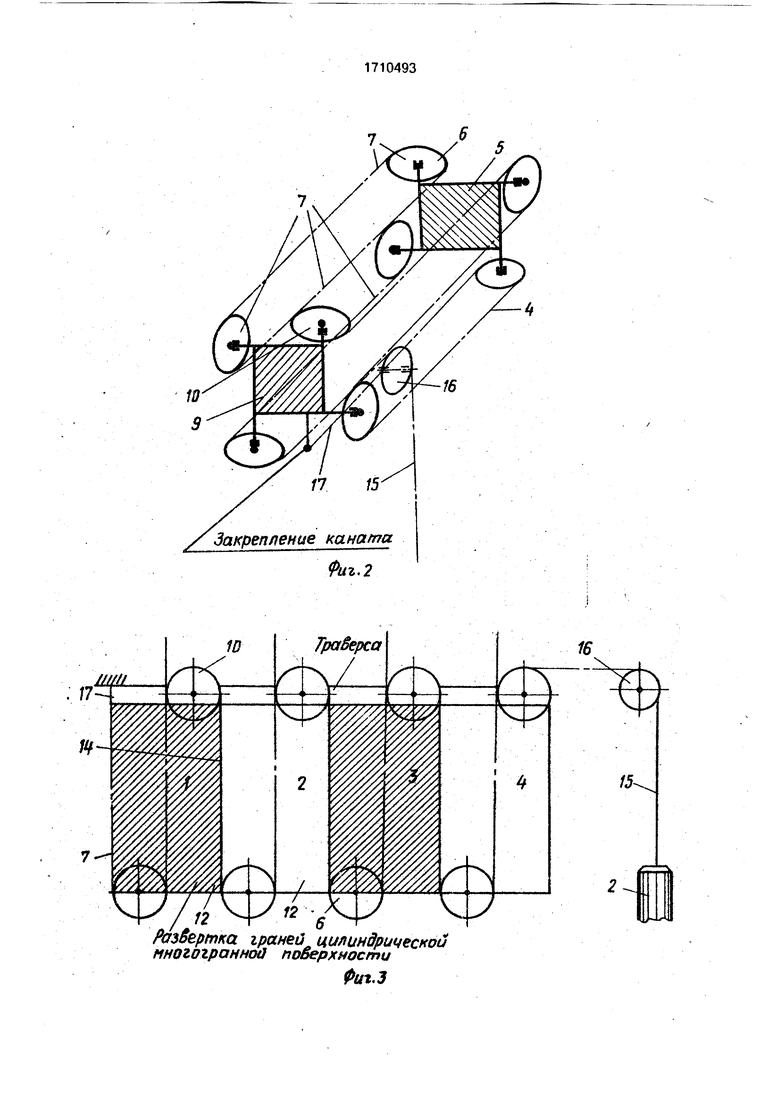
На фиг. 1 изображено устройство, общий вид: на фиг. 2 - пространственная схема запасовки. полиспаста: на фиг. 3 развертка сторон силового цилиндра: на фиг. 4 - вариант полиспаста с кратностью
in 12., :.
Грузоподъемное устройство содержит
силовой цилиндр 1, устройство 2 управления с грузозахватным элементом 3 и гибкий тяговый орган 4. На заднем торце 5 корпуса силового цилиндра 1 закреплены неподвижные блоки 6 грузового полиспаста 7 {фиг. 2).
На конце штока 8 силового цилиндра 1 закреплена траверса 9, на которой смонтированы подвижные блоки 10 грузового
полиспаста 7. Грузоподъемное устройство
крепится к направляющим переходником
Каждый неподвижный блок 6 грузового полиспаста 7 образует пару с рядом находящимися двумя подвижными блоками 10 и ориентирован вместе с одним из его парных
подвижных блоков 10 в плоскости, предстйвляЮщей собой грань 12 многогранника
13, которым охвачен силовой цилиндр 1.
При зтом ветви гибкого тягового органа 4
расположены по продольным осям симметрии граней 12 с переходом от подвижного блока 10 к неподвижному 6. расположенных на одной грани 12, и по продольным ребрам 14 упомянутого многогранника 13с переходом от неподвижного 6 к подвижному 10
блоку- расположенных в смежных гранях 12 (фиг. 3). Диаметры блоков 6 и 10 полиспаста 7 по окружностям запасовки на них гибкого тягового органа 4 равны половине ширины грани 12 многогранника 13.
Один конец 15 гибкого тягового органа 4, на котором закреплены устройство 2 управления и грузозахватный элемент 3, огибает обводной блок 16. закрепленный на
переходнике 11 (фиг. 1). Второй конец 17 гибкого тягового органа А закреплен на траверсе 9. На грузозахватном элементе 3 подвешен груз 18.
Грузоподъемное устройство работает следующим образом.
Оператор с помощью грузозахватного элемента 3 захватывает груз 18. затем посредством устройства 2 управления подает сигнал, например на подъем груза 18. в силовой цилиндр 1. В силовой цилиндр 1 подается носителъ энергии, например сжатый воздух. Шток 8 с траверсой 9, на которой закреплены подвижные блоки 10 грузового полиспаста 7, перемещается вперед от заднего торца 5 корпуса цилиндра 1 с неподвижными блоками 6. Гибкий тяговый орган 4, закрепленный концом 17 на траверсе 9, охватывает блоки 6 и 10 и расположен по продольным осям симметрии граней 12 и по продолъным ребрам 14 многогранника 13, которым охвачен силовой цилиндр 1. При перемещении штока 8 увеличивается расстояние между осями подвижных 10 и неподвижных б блоков полиспаста 7 и поднимается конец 15 гибкого тягового органа 4 с грузозахватным элементом 3, огибающий обводной блок 16 на переходнике 11. С целью улучшения условий эксплуатации концевые ветви 15 и 17 гибкого тягового органа 4 выведены с блоков, расположенных на нижней грани 12 многогранника 13.
Подъем груза 18 осуществляется на высоту Нп:
Нп - Int-n, где Нп - высота подъема, м; .
in - кратность полиспаста;
Ln - ход поршня силового цилиндра, м.
Опускание груза 18 осуществляется под действием собственного веса, при этом носитель энергии стравливается из рабочей
полости силового цилиндра 1 до тех пор, 0 пока с устройства 2 управления поступает сигнал на опускание. При прекращении подачи сигнала шток 8 силового цилиндра 1 останавливается и груз 18 удерживается в том положении, в котором его зафиксирова5 ли.
Использование предлагаемого устройства позволит увеличить вь1соту подъема и уменьшить габарит грузоподъемного устройства.
Формула изобретения Грузоподъемное устройство, содержащее силовой цилиндр, на корпусе которого смонтированы неподвижные блоки грузового полиспаста и обводной блок, а на траверсе, закрепленной на конце штока, подвижные блоки указанного полиспаста, и запасованный в упомянутые блоки гибкий тяговый орган, на одном конце которого за0 креплены устройство управления и грузо. захватный элемент, отличающееся
тем, что, с цельюснижения габаритов иулучшения. эксплуатационных характеристик,
неподвижные блоки полиспаста закреплены на заднем торце корпуса силового цилиндра таким образом, что каждый неподвижный блок полиспаста вместе с одним из его парных подвижных блоков ориентированы в плоскости, представляющей
0 собой грань многогранника, которым охвачен силовой цилиндр, причем ветви гибкого тягового органа расположены по продольным осям симметрии граней и по продольным ребрам упомянутоТо многогранника.
5 второй конец гибкого тягового органа закреплен на траверсе, а диаметры блоков полиспаста по окружностям запасовки на них гибкого тягоаого органа равны половине ширины грани многогранника.
/7/5
Закрепление каната иг,2
12
/ звертка граней цилиндрической нногогранноа поверхности
Фиг.Э
Фи.4
5
/5
| Патент СШАMs 3998432 | |||
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
