Изобретение относится к технике подъема грузов и может быть использовано при проектировании грузоподъемных механизмов с машинным приводом.
Грузоподъемные механизмы с машинным гидравлическим или пневматическим приводом известны.
Известно пневматическое грузоподъемное устройство, содержащее раму металлоконструкции, пневматический цилиндр, корпус которого закреплен на раме металлоконструкции, подвижный блок, ось которого прикреплена к штоку пневмоцили |дра, и гибкий грузовой элемент, перекинутый через этот блок и одним из концов закрепленный на раме металлоконструкции. Другой конец гибкого грузового элемента снабжен крюком для соединения с грузом и через систему неподвижных направляющих блоков, закрепленных осями на раме металлоконструкции, направлен в сторону его расположения. Скорость подъема груза и высота его подъема в этом устройстве больше скорости Перемещения штока в корпусе пневмоцилиндра и хода штока в корпусе пневмоцилиндра в 2-п раз, где п 1 есть количество подвижных блоков в устройстве, т.е. в два раза.
Недостатком такой конструкции являются значительные линейные размеры пневмоцилиндра при необходимости поднятия груза на значительную высоту.
Известно грузоподъемное устройство с пневматическим приводом, содержащее раму металлоконструкции, пневматический цилиндр, корпус которого закреплен на раме металлоконструкции, два подвижных соосно расположенных блока, прикрепленных общей осью к штоку пневмоцилиндра, обводной неподвижный блок, жестко связанный своей осью с рамой металлоконструкции, и гибкий грузовой элемент, перекинутый через эти блоки и одним из концов закрепленный на раме металлоконструкции. Другой конец гибкого грузового элемента снабжен крюком для соединения с грузом и через систему неподвижных направляющих блоков, жестко связанных своими осями с рамой металлоконструкции, направлен в сторону его расположения. Скорость подъема и высота подъема груза в этом устройстве больше скорости перемещения и длины хода штока в корпусе пневмоцилиндра в2- п раз, где п 2 (число подвижных блоков в устройстве), т.е. в 4 раза.
Скорость подъема и высота подъема груза в этом устройстве могут быть
ны, если усложнять эту конструкцию путем увеличения числа подвижных блоков, имеющих общую ось, неподвижно связанную со штоком пневмоцилиндра, и обводных неподвижных блоков, неподвижно связанных своей осью с рамой металлоконструкции, минимальное число которых лишь на единицу меньше числа подвижных блоков, что является недостатком этой конструкции.
Целью изобретения является повышение эксплуатационных свойств грузоподъемного механизма путем обеспечения возможности увеличения скорости и высоты подъема груза при одновременном упрощеНИИ конструкции.
Для достижения этой цели грузоподъемное устройство, содержащее раму металлоконструкции, силовой пневмоцилиндр, корпус которого жестко с ней связан, основной подвижный блок, ось которого неподвижно связана со штоком пневмоцилиндра, и основной гибкий грузовой элемент, перекинутый через этот блок (запассованный на нем) и одним из концов закрепленный на
раме металлоконструкции, снабжено последовательно расположенными в Направлении оси штока пневмоцилиндра дополнительными подвижными .блоками с перекинутыми через каждый из них (запассованными на них) дополнительными гибкими грузовыми элементами, одним из своих концов закрепленными на раме металлоконструкции. Ось каждого из последующих блоков неподвижно связана с тем концом
гибкого грузового элемента, перекинутого через предыдущий блок, который не связан с рамой металлоконструкции. Расстояние от оси первого дополнительного блока до оси основного блока, ось которого неподвижно
связана со штоком пневмоцилиндра, равно максимально возможному рабочему ходу штока в корпусе пневмоцилиндра от состояния максимально выдвинутого до состояния максимального втягивания, а
расстояние от каждого промежуточного подвижного блока до последующего вдвое больше, чем до предыдущего.
На чертеже изображено грузоподъемное устройство.
Грузоподъемное устройство содержит раму металлоконструкции 1. на которой закреплен корпус силового пневмоцилиндра 2. Шток пневмоцилиндра 2 неподвижно связан с осью основного подвижного блока 3.
Через блок 3 перекинут основной гибкий грузовой элемент, например трос 4, одним из своих концов закрепленный на раме металлоконструкции 1. Другой конец гибкого грузового элемента 4 неподвижно связан с
осью дополнительного подвижного блока 5, отстоящего от основного блока 3 на расстоянии, равном максимально возможному рабочему ходу штока в корпусе пневмоцилиндра 2 от состояния максимального вы- 5 движения до состояния максимального втягивания. Через подвижный блок 5 перекинут дополнительный гибкий грузовой элемент, например трос 6, одним из своих концов закрепленный на раме металлокои- 10 струкции 1. Другой конец гибкого грузового элемента б неподвижно связан с осью дополнительного подвижного блока 7, отстоящего от блока 5 на расстоянии, вдвое большем, чем расстояние блока 5 от блока 15 3. Через подвижней блок 7 перекинут дополнительный гибкий грузовой элемент, например трос 8, одним из своих концов закрепленный на раме металлоконструкции 1. Не связанный с рамой металлоконструк- 20 ции 1 конец гибкого грузового элемента 8 напрямую {или через систему неподвижно связанных осями с рамой металлоконструкции 1 направляющих блоков) направлен в сторону расположения груза для связи с 25 ним.
В состоянии, предшествующем подъему груза с помощью данного грузоподьемного устройства, шток максимально возможно вытянут из корпуса пневмоци- 30 линдра 2, а подвижный блок 3, жестко связанный со штоком своей осью, максимально удален от торца корпуса пневмоцилиндра 2.
В рабочем состоянии происходит втягивание штока пневмоцилиндра внутрь корпу- 35 са и приближение основного блока 3 к торцу корпуса пневмоцилиндра 2 с той же скоростью, например, v.
Одновременно с вдвое большей скоростью, а именно 2v, будет приближаться к 40 торцу корпуса пневмоцилиндра 2 дополнительный блок 5, жестко связанный своей осью с подвижным концом основного троса А.
В это же время со скоростью, вдвое большей, чем скорость приближения блока 45 5, а именно 2 (2-v ) 4V, к торцу корпуса пневмоцилиндра 2 будет приближаться дополнительный блок 7, жестко связанный своей осью с подвижным концом дополнительного троса 6.50
Одновременно со скоростью, вдвое большей, чем скорость приближения блока 7, а именно 2 (4 v) 8V, будет происходить приближение к торцу корпуса пневоцилиндра 2 подвижного конца дополнительного 55 троса 8.
С такой же скоростью, а именно 8 v
2 v (2)v, где п 3 есть число подвижных
блоков, будет происходить и подъем груза.
связанного с тросом 8, на высоту, в (2) раз большую, чем ход штока в корпусе пневмоцилиндра 2, т.е. на высоту, в восемь раз большую, чем ход штока в корпусе пневмоцилиндра.
При втягивании штока в корпус пневмоцилиндра 2 на максимально возможную величину, определяемую линейными размерами корпуса пневмоцилиндра, оси блоков 3, 5 и 7, войдя в контакт между собой, приблизятся к торцу корпуса пневмоцилиндра 2 на минимально возможную величину, а груз будет поднят на максимально возможную высоту, в восемь раз большую, чем максимально возможный ход штока в корпусе пневмоцилиндра 2.
Если бы интервалы взаимного первоначально заданного отстояния осей блоков 3, 5 и 7 отличались от предлагаемых, то при их меньших значениях оси блоков 3, 5 и 7 вошли бы в контакт до того, как шток будет полностью втянута корпус пневмоцилиндра, и, застопорив движение элементов грузоподъемного устройства, воспрепятствовали бы осуществлению подъема груза на максимально возможную величину.
Если бы интервалы взаимного первоначально заданного отстояния осей блоков 3, 5 и 7 отличались от предлагаемых в большую сторону, то при полностью втянутом в корпус пневмоцилиндра штоке оси блоков 3, 5 и 7 еще не вошли бы в контакт между собой, т.е. оси блоков 5 и 7 не приблизились бы к торцу корпуса пневмоцилиндра 2 на минимально возможную величину, а груз не был бы поднят на максимально возможную величину.
При одних и тех же линейных габаритных размерах корпуса пневмоцилиндра и одной и той же величине хода штока в нем с помощью предлагаемого грузоподъемного устройства груз можно поднять на высоту, в 8 раз большую, чем ход штока в корпусе пневмоцилиндра, а с помощью известного устройства лишь на высоту, в 4 раза большую, чем ход штока в корпусе пйевмоцилиндра.
Чтобы с помощью известного устройства поднять груз на ту же высоту, что и с помощью данного устройства, оно должно содержать 4 подвижных, соосно расположенных блока и, как минимум, 3 неподвижных обводных блока, в то время, как предлагаемое грузоподъемное устройство содержит лишь 3 подвижных блока.
Таким образом предлагаемое техническое решение по сравнению с известным позволяет увеличить высоту и скорость поднятия груза и упростить конструкцию грузоподъемного устройства с пневматическим или гидравлическим приводом, повысить тем самым его эксплуатационные свойства.
Ф о рмула изобретения Грузоподъемное устройство, содержащее раму, жестко связанный с ней силовой пневмоцилиндр, установленный на конце его штока подвижный блок и запасованный на нем гибкий грузовой элемент, один конец которого соединен с рамой, отличающееся тем, что, с целъю повышения его эксплуатационных свойств, оно снабжено по крайней мере одним дополнительным подвижным блоком и запасованным на нем дополнительным гибким грузовым элементом, один конец которого соединен с рамой, причем свободный конец основного гибкого элемента соединен с осью дополнительного подвижного блока, расстояние между их осями равно максимальному рабочему ходу штока, а отношение расстояний от оси каждого дополнительного блока до осей соседних блоков равно двум.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАВЕРСА | 2008 |
|
RU2385282C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2393986C2 |
| Грузоподъемное устройство | 1989 |
|
SU1710493A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ УПАВШИХ ПРЕДМЕТОВ ЯДЕРНОГО РЕАКТОРА | 2016 |
|
RU2684392C2 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2005 |
|
RU2297383C2 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ УПАВШИХ ПРЕДМЕТОВ ЯДЕРНОГО РЕАКТОРА | 2016 |
|
RU2683581C2 |
| Штатив передвижного рентгеновского палатного аппарата | 2024 |
|
RU2839512C1 |
| Мостовой кран | 2023 |
|
RU2820482C1 |
| Стрела грузоподъемной машины | 2018 |
|
RU2684254C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
Изобретение относится к грузоподъемным механизмам. Целъ изобретения - повышение эксплуатационных свойств. Устройство содержит раму 1, силовой пневмоци- линдр 2, основной подвижный блок 3, трос 4, подвижный дополнительный блок 5 с тросом 6. Причем расстояние между осями блока 3 и блока'5 равно величине максимального рабочего хода штока силового пневмоцилиндра, а соотношение расстояний от оси каждого дополнительного блока до осей соседних блоков равно двум. При работе устройства груз' может быть поднят на высоту большую, чем ход штока силового цилиндра. 1 ил.\•«prf^ОJis- ю 4:;^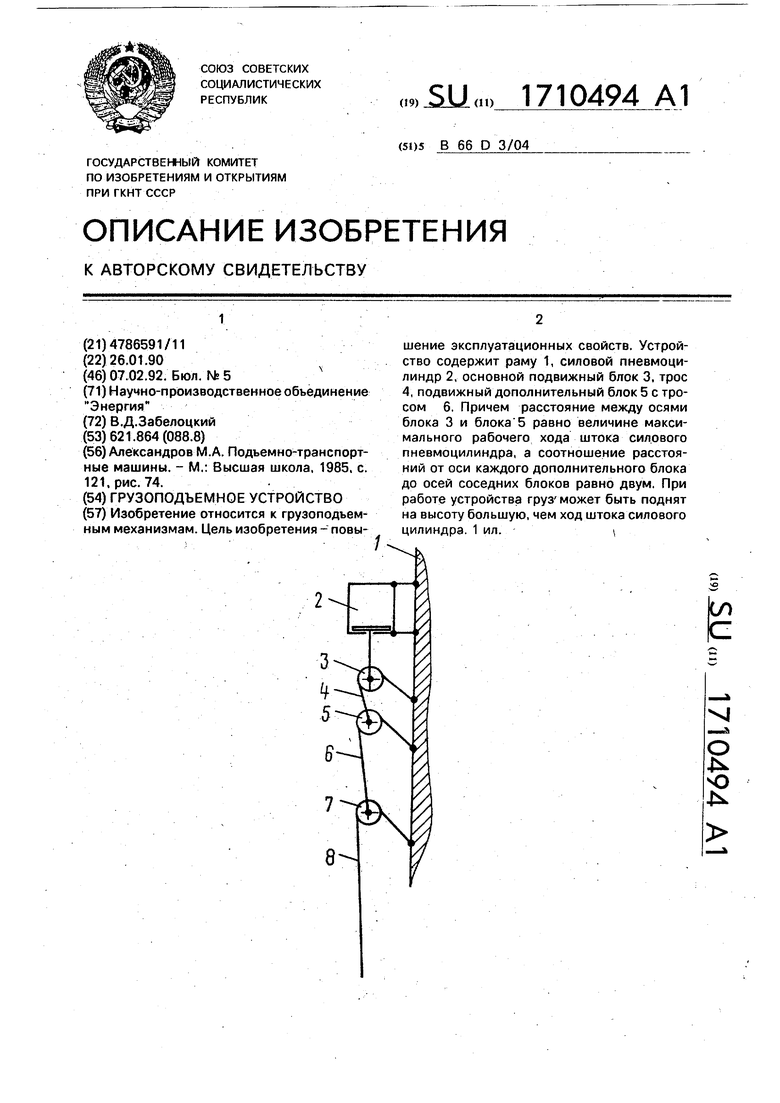
| Александров М.А | |||
| Подъемно-транспортные машины | |||
| - М.: Высшая школа, 1985, с | |||
| Ребристый каток | 1922 |
|
SU121A1 |
| рис | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
