Изобретение относится к машиностроению, в частности к конструкциям манипуляторов.
Известны устройства, где сопряжение узлов манипулятора осуществляется через кинематические цепи в виде конических зубчатых пар, заключенных в корпуса, шарнирно связанные между собой.
Недостаток данных кинематических цепей заключается в том, что они имеют ограниченнЫе возможности по степеням подвижности, сужая зону работы кинематических цепей в трехмерном пространстве.
Известен узел сочленения манипулятора, выполненный в виде внешней и внутренней шарнирно связанных между собой вилок, на противоположных сторонах внешней вилки соосно расположены вал с коническим зубчатыми колесом и осью, а на
противоположных сторонах с внутренней вилки размещены подшипники указанного, вала вилки и коническое зубчатое колесо с подшипником для оси внешней вилки, при этом конические зубчатые колеса вилок узла сочленения находятся в закреплении с соответствующими коническими зубчатыми колесами валов шарниров.
Особенность работы известного узла сочленения заключается в том, что кинематическое замыкание вилок узла сочленения через конические зубчатые колеса позволяет суммировать крутящее моменты на приводных валах и, кроме того, не обеспечивает самопроизвольного поворота вилок одна относительно другой.
Однако недостаток данного узла сочленения заключается в том, что вилки узла сочленения имеют степени подвижности
только относительно собственных осей и шарнирного соединения, что сужает функциональные возможности работы узла сочленения в трехмерном пространстве.
Целью изобретения является расширение технологических возможностей узла сочленения за счет увеличения числа степеней подвижностей.
Поставленная цель достигается тем, что узел сочленения манипулятора выполнен в виде шарнирно соединенных между собой вилок, каждая из которых связана с соответствующим валом привода, который через передачу с коническими зубчатыми колесами связан также с соответствующим выходным валом. Дополнительно узел сочленения снабжен двумя зубчато-реечнцми передачами и двумя серьгами с направляющими, в которых расположены рейки этих передач. При зтом зубчатые колеса упомянутых передач закреплены на соответствующих выходных валах, а серьги установлены на этих валах с возможностью поворота. Причем рейки этих передач жестко связаны с соответствующими витками.
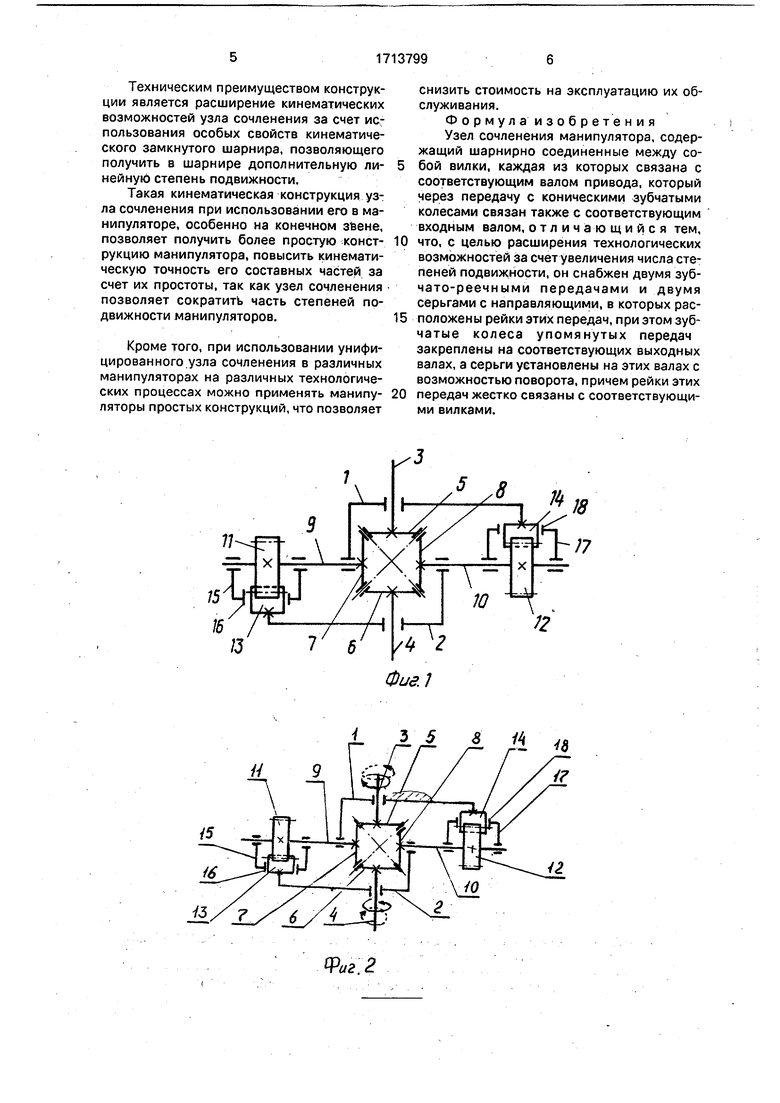
На фиг.1 показана кинематическая схема узла сочленения; на фиг.2 и 3 - кинематические схемы узла сочленения.
Узел сочленения (фиг.1) состоит из двух корпусов, выполненных в виде вилок 1 и 2. Последние имеют приводные валы 3 и 4, на концах которых жестко закреплены конические зубчатые колеса 5 и 6. Валы 3 и 4 имеют возможность вращения относительно собственных осей. Конические зубчатые колеса 5 и б в свою очередь находятся в зацеплении попарно с зубчатыми колесами 7 и 8. Конические зубчатые колеса 7 и 8 расположёны на выходных валах9 и 10, на концах которых жестко закреплены цилиндрические зубчатые колеса 11 и 12. Последние находятся попарно в зацеплении с зубчатыми рейками 13 и 14. Рейка 13 жестко связана с корпусом вилки 2, а зубчатая рейка 14 - с корпусом вилки 1. На валу 9 расположена с возможностью вращения вокруг него серьга 15, имеющая направляющую 16, служащую для перемещения зубчатой рейки 13 относительно серьги 15. На валу 10 в свою очередь находится аналогичная серьга 17, имеющая направляющую 18. Рейка 14 может перемещаться относительно серьги 17. Цилиндрические зубчатые колеса 11 и 12, зубчатые рейки 13 и 14, также серьга 15 и 17 с направляющими 16 и 18 образуют кинематический шарнир.
Узел сочленения манипулятора работает следующим образом.
При вращении приводных валов 3 и 4 (фиг.2) по часовой стрелке (если смотреть с
конца валов 3 и 4) вилка 1 совершает линейные перемещения относительно вилки 2. Крутящие моменты от приводных валов 3 и 4 передаются через пары конических зубчатых колес 6,8 и 5,7, которые в свою очередь через цилиндрические зубчатые колеса 11 и 12 замыкаются на вилке 1 и 2 через зубчатые
рейки 13 и 14, где преобразуются в движущую силу. Такое кинематическое замыкание
позволяет крутящие моменты на приводных валах 3 и 4 складывать и преобразовывать в суммарную движущую силу.
Условно принимают вилку 1 неподвижной, тогда направляющая 18 серьги 17 будет
скользить по рейке 14, при этом цилиндрические колеса 11 и 12 будут совершать вращение в противоположных направлениях, а рейка 13 будет скользить по направляющей 16 серьги 15 и перемещаться вместе с корпусом 2 относительно корпуса 1.
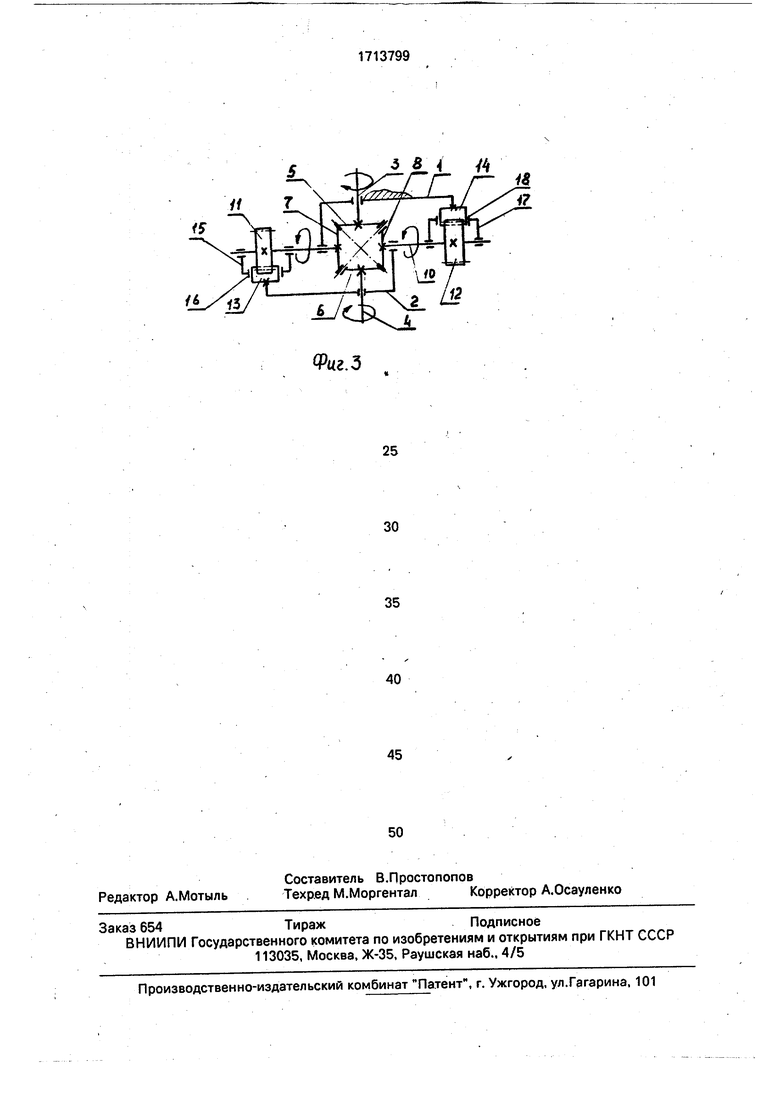
При вращении приводного вала 3 (фиг.З) по часовой стрелке, а вала 4 против часовой стрелки (если смотреть с конца валов 3 и 4, приняв условно, что вилка 1 находится в неподвижном положении) крутящие моменты от приводных валов 3 и 4 передаются на цилиндрические зубчатые колеса 11 и 12, причем колеса 11 и 12 вращаются в одном направлении (если смотреть со стороны концов выходных валов 9 и 10). При таком
вращении валов 9 и 10 цилиндрическое зубчатое колесо 11с рейкой 13 образует кинематически замкнутую пару, которая вместе с серьгой 15 и вил кой 2 совершает вращение относительно оси вала 9. При этом коническое зубчатое колесо 6 обегает неподвижное зубчатое колесо 8, так как вилка 2 имеет возможность вращения оси вала 10, то вилка 2 совершает вращательное движение. Коническое зубчатое колесо 8 не совершает
вращательных движений из-за того, что цилиндрические зубчатые колеса 11 и 12, входящие в зацепление с рейками 13 и 14, а также серьги 15 и 16с направляющими 16 и 18 образуют через вилки 1 и 2 кинематически замкнутый шарнир. Вращение вилки 2 относительно оси вала 10, а вилки 1 относительно оси вала 9, может осуществляться независимо от места положения вилок, т.е. независимо находятся валы 9 и 10 соосно в
кинематическом шарнире или нет.
Такая кинематика узла сочленения позволяет суммировать крутящие моменты в движущую силу (при определенном направлении движения) или суммировать крутящие моменты для вращения одной вилки относительно другой, при этом исключается самопроизвольное вращение вилок относительно друг друга.
Техническим преимуществом конструкции является расширение кинематических возможностей узла сочленения за счет использования особых свойств кинематического замкнутого шарнира, позволяющего получить в шарнире дополнительную линейную степень подвижности.
Такая кинематическая конструкция узла сочленения при использовании его в манипуляторе, особенно на конечном , позволяет получить более простую конструкцию манипулятора, повысить кинематическую точность его составных частей за счет их простоты, так как узел сочленения позволяет сократить часть степеней подвижности манипуляторов.
Кроме того, при использовании унифицированного узла сочленения в различных манипуляторах на различных технологических процессах можно применять манипуляторы простых конструкций, что позволяет
/J
снизить стоимость на эксплуатацию их обслуживания.
Формула изобретения Узел сочленения манипулятора, содержащий шарнирно соединенные между собой вилки, каждая из которых связана с соответствующим валом привода, который через передачу с коническими зубчатыми колесами связан также с соответствующим входным валом, отличающийся тем,
что, с целью расширения технологических возможностей за счет увеличения числа степеней подвижности, он снабжен двумя зубчато-реечными передачами и двумя серьгами с направляющими, в которых расположены рейки этих передач, при этом зубчатые колеса упомянутых передач закреплены на соответствующих выходных валах, а серьги установлены на этих валах с возможностью поворота, причем рейки этих
передач жестко связаны с соответствующими вилками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1627400A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2570939C1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1999 |
|
RU2154593C1 |
| Манипулятор для буровых машин | 1982 |
|
SU1086151A2 |
| Устройство для исследования поверхности твердого тела | 1985 |
|
SU1324079A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| ИНСТРУМЕНТ УДАРНОГО ДЕЙСТВИЯ | 2010 |
|
RU2531221C2 |
| УГЛОВАЯ ЗУБЧАТАЯ МУФТА ДЛЯ ПОДВИЖНЫХ ВАЛОВ | 2009 |
|
RU2418211C1 |
Изобретение относится к машиностроению. Цель изобретения - расширение технологических возможностей узла сочленения. При вращении приводных валов 3 и 4 вилка 1 будет совершать линейные перемещения относительно вилки 2, при этом крутящие моменты от приводных валов передаются через пары конических зубчатых колес 6,8 и 5,7, которые в свою очередь через цилиндрические зубчатые колеса 11 и 12 замыкаются на вилках 1 и 2 через зубчатые рейки 13 и 14. Такое кине1«1атическое замыкание позволяет крутящие моменты на приводных валах 3 и 4 складывать и преобразовывать в суммарную движущую силу или в зависимости от направления движения вращать одну вилку относительно другой, при этом исключается самопроизвольное вращение вилок относительно друг друга. 3 ил.
//
/5
fPaz:2
//
/СЗЧТ
Фмг.З
-Л
| Манипулятор | 1987 |
|
SU1468740A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
