Изобретение относится к машиностроению, в частности к промышленным роботам.
Известна рука манипулятора, содержащая корпус, каретку с шарнирно закрепленной кистью, два вала с шариковыми муфтами, жестко связанные с передаточными механизмами, соединенными с силовыми цилиндрами качания и вращения схвата l.
Недостатком известного технического решения является наличие кинематической связи между движениями вращения и качания схвата, что вызывает необходимость дополнительной работы привода для обеспечения дополнительного вращения кисти при ее качании, что вызывает дополнительный износ элементов привода вращения схвата, сокращения срока его служил и расход энергоносителя.
цель изобретения - улучшение эксплуатационных характеристик руки за счет развязки движений схвата.
Указанная цель достигается тем, что передаточные механизмы снабжены водилами, коромыслом с шаровыми опорами, жестко связанным с силовым цилиндром качания и с водилами, и цилиндрическими кулачками, установленными соосно шариковым муфтам с возможностью вращения в корпусе и имеющими винтовые канавки противоположеного направления, причем цилиндрические кулачки жестко связаны с зубчатыми колесами дополнительно . введенной зубчато-реечной передачи, рейка которой связана со штоком силового цилиндра вращения и с водила10ми .
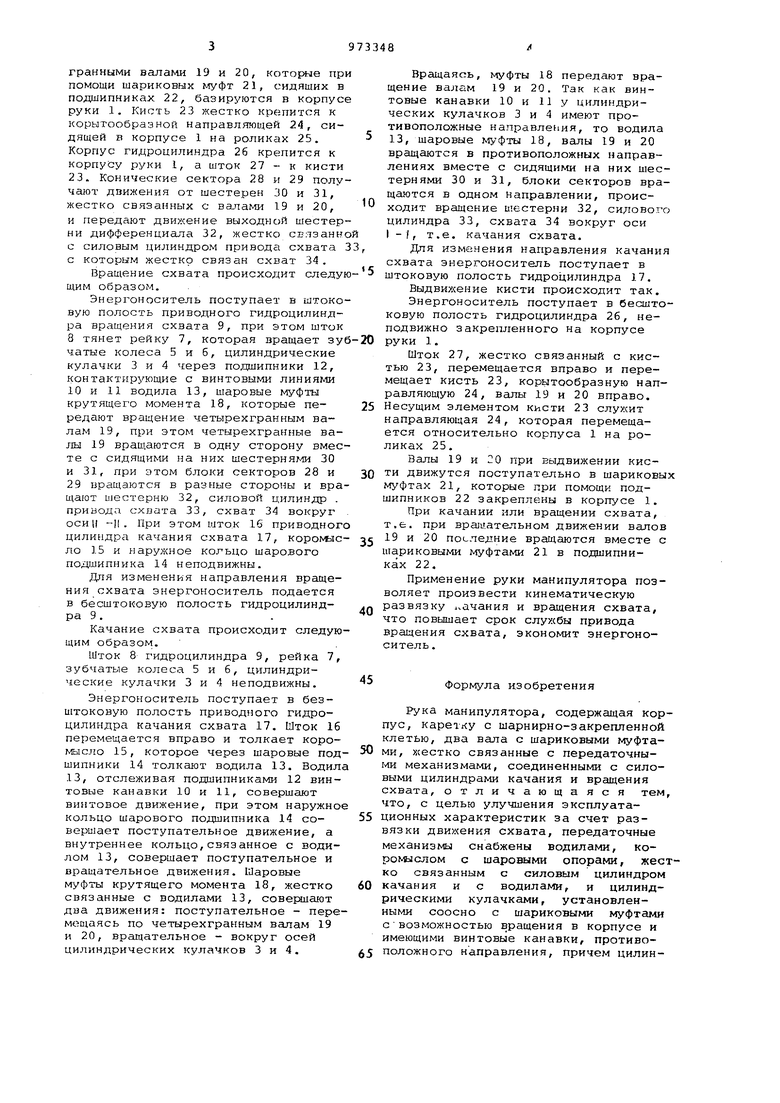
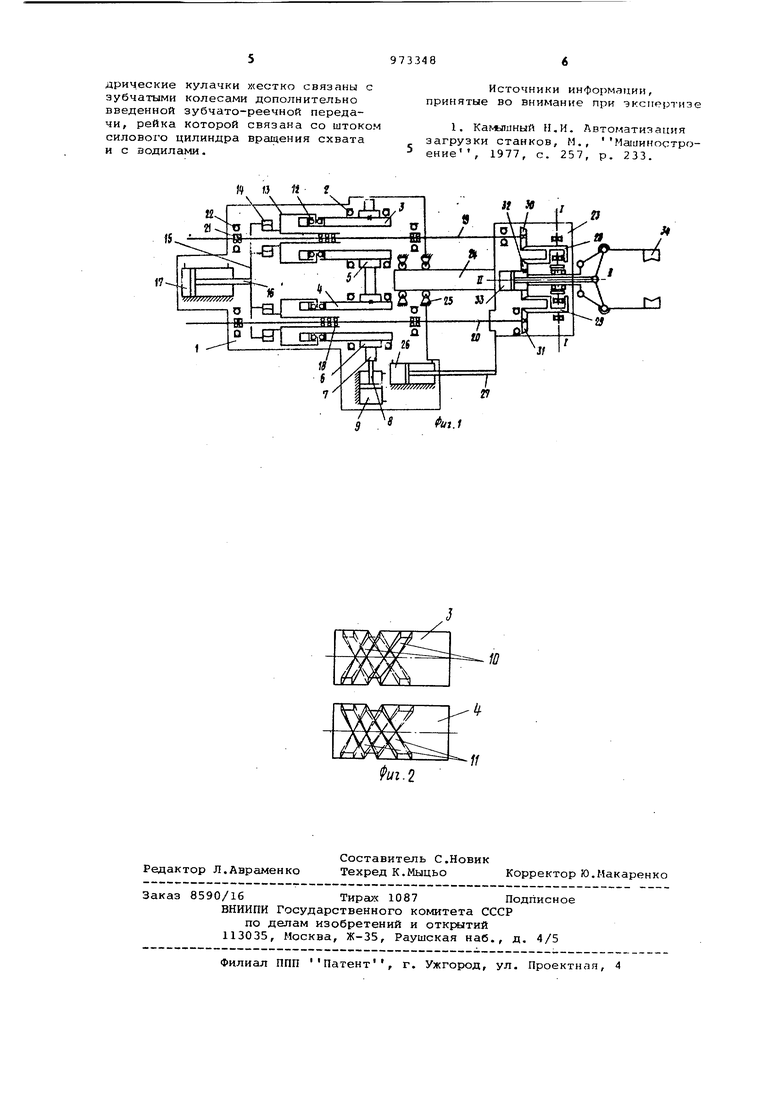
На фиг.1 представлена кинематическая схема руки манипулятора; на фиг.2 - цилиндрические кулачки привода качания кисти.
15
Рука манипулятора содержит корпус 1, в котором на радиальноупорных подшипниках 2 сидят цилиндрические кулачки 3 и 4, жестко связанные С цилиндрическими зубчатыми колеса20ми 5 и 6, находящимися в зацеплении с рейкой 7, связанной со штоком 8 гидроцилиндра 9.
Цилиндрические кулачки 3 и 4 при помощи винтовых канавок 10 и 11 и
25 подшипников 12 связаны с водилаг м 13, которые через шаровые подшипники 14 и коромысло 15 связаны со штоком 16 гидроцилиндра 17.
Водила 13 через шаровые муфты кру30тящего- момента 18 связаны с четырехгранными валами 19 и 20, которые при помощи шариковых муфт 21, сидящих в подшипниках 22, базируются в корпусе руки 1. Кисть 23 жестко крепится к корытообразной направляющей 24, сидящей в корпусе 1 на роликах 25. Корпус гидроцилиндра 26 крепится к корпусу руки 1, а шток 27 - к кисти 23. Конические сектора 28 и 29 получают движения от шестерен 30 и 31, жестко связанных с валами 19 и 20, и передают двих :ение выходной шестерни дифференциала 32, жестко связан(1о с силовым цилиндром приводе схвата 3 с которым жестко связан схват 34.
Вращение схвата происходит следующим образом.
Энергоноситель поступает в штоковую полость приводного гидроцилиндра вращения схвата 9, при этом шток 8 тянет рейку 7, которая вращает зубчатые колеса 5 и б, цилиндрические кулачки 3 и 4 через подшипники 12, контактирующие с винтовыми линиями 10 и 11 водила 13, шаровые муфты крутящего момента 18, которые передают вращение четырехгранным валам 19, при этом четырехгранные валы 19 вращаются в одну сторону вместе с сидящими на них шестерня /ш 30 и 31, при этом блоки секторов 28 и 29 вращаются в разные стороны и вращают 1иестерню 32, силовой цилиндр . привода схвата 33, схват 34 вокруг оси II -11. При этом што.к 16 приводного цилиндра качания схвата 17, KopONbicло 15 и наружное кольцо шарового под)липника 14 неподвижны.
Для изменения направления вращения схвата э {ергоноситель подается в бесштоковую полость гидроцилиндра 9 .
Качание схвата происходит следующим образом.
Шток 8 гидроцилиндра 9, рейка 7, зубчатые колеса 5 и б, цилиндрические кулачки 3 и 4 неподвижны.
Энергоноситель поступает в безштоковую полость приводного гидроцилиндра качания схвата 17. Ыток 16 перемещается вправо и толкает короMucj o 15, которое через шаровые подшипники 14 толкают водила 13. Водила 13, отслеживая подшипниками 12 винтовые канавки 10 и 11, совершают винтовое движение, при этом наружное кольцо шарового подшипника 14 совершает поступательное движение, а внутреннее кольцо,связанное с водилом 13, совершает поступательное и вращательное движения. Шаровые муфты крутящего момента 18, жестко связанные с водилами 13, совершают два движения: поступательное - перемепдаясь по четырехгранным валам 19 и 20, вращательное - вокруг осей цилиндрических кулачков 3 и 4.
Вращаясь, муфты 18 передают вращение валам 19 и 20. Так как винтовые канавки 10 и 11 у цилиндрических кулачков 3 и 4 имеют противоположные направления, то водила 13, шаровые муфты 18, валы 19 и 20 вращаются в противоположных направлениях вместе с сидящими на них шестернями 30 и 31, блоки секторов вращаются в одном Направлении, происходит вращение шестерни 32, силового цилиндра 33, схвата 34 вокруг оси I -/, т.е. качания схвата.
Для изменения направления качания схвата энергоноситель поступает в штоковую полость гидроцилиндра 17.
Выдвижение кисти происходит так.
Энергоноситель поступает в бесштоковую полость гидроцилиндра 26, неподвижно закрепленного на корпусе руки 1.
Шток 27, жестко связанный с кистью 23, перемещается вправо и перемещает кисть 23, корытообразную направляющую 24, валы 19 и 20 вправо. Несущим элементом кисти 23 слухшт направляющая 24, которая перемещается относительно корпуса 1 на роликах 25.
Валы 19 и 20 при выдвижении кисти движутся поступательно в шариковы муфтах 21, которые при помощи подшипников 22 закреплены в корпусе 1.
При качании или вращении схвата, т.е. при врал-.ательном движении валов 19 и 20 последние вращаются вместе с шариковыми муфтами 21 в подшипниках 22.
Применение руки манипулятора позволяет произвести кинематическую развязку 1 ачания и вращения схвата, что повышает срок слухсбы привода вращения схвата, экономит энергоноситель .
Формула изобретения
Рука манипулятора, содержащая корпус, каретку с шарнирно-закрегшенной клетью, два вала с шариковыми муфтами, жестко связанные с передаточныivm механизмами, соединенными с силовыми цилиндрами качания и вращения схвата, отличающаяся тем что, с целью улучшения эксплуатационных характеристик за счет развязки движения схвата, передаточные механизмы снабжены водилами, коромыслом с шаровыми опорами, жеско связанным с силовым цилиндром качания и с водилами, и цилиндрическими кулачками, установленными соосно с шариковыми муфтами свозможностью вращения в корпусе и имеющими винтовые канавки, противоположного направления, причем цилиндрические кулачки х естко связаны с зубчатыми колесами дополнительно введенной зубчато-реечной передачи, рейка которой связана со штоком силового цилиндра вращения схвата и с ззодилами. С О at лX: Ж
Источники информации, принятые во внимание при экспертизе
1. Камышный Н,И. Автоматизация загрузки станков, М., Ма1иино(;:тро, 1977, с. 257, р. 233.
ение «/ 2в
UJ.t ч .
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Кисть манипулятора | 1981 |
|
SU973347A1 |
| Кисть руки промышленного робота | 1981 |
|
SU1013256A1 |
| Рука манипулятора /ее варианты/ | 1983 |
|
SU1199608A1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
| Манипулятор | 1979 |
|
SU814719A1 |
| Механизм ориентации схвата манипулятора | 1978 |
|
SU722756A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
