(54) РУКА МАНИПУЛЯТОРА
1
Изобретение относится к машиностроению и может быть использовано при создании промышленных роботов.
Известна конструкция руки манипулятора, содержащая корпус с выдвижной штангой, кисть с дифференциальной головкой, 5 приводы, например гидроцилиндры, зубчатореечный редуктор развязки движений кисти, валы с муфтами передачи движения от редуктора к дифференциальной головке и направляющие качения 1.
Недостатком известной конструкции руки манипулятора является сложность ее кинематики, имеющей большое количество высокоточных деталей, что приводит к ее высокой стоимости и большой металлоемкости.IS
Цель изобретения - упрощение конструкции руки манипулятора.
Поставленная цель достигается тем, что зубчато-реечный редуктор выполнен в виде шестерни и диаметрально расположенных реек, которые зацеплены с муфтами передачи движения от редуктора к дифференциальной головке и жестко связаны с одним из гидроцилиндров, шток которого связан с одной рейкой, а гильза - с другой
рейкой, причем указанный гидроцилиндр установлен в направляющих качения, а шток другого гидроцилиндра шарнирно связан с шестерней зубчато-реечного редуктора.
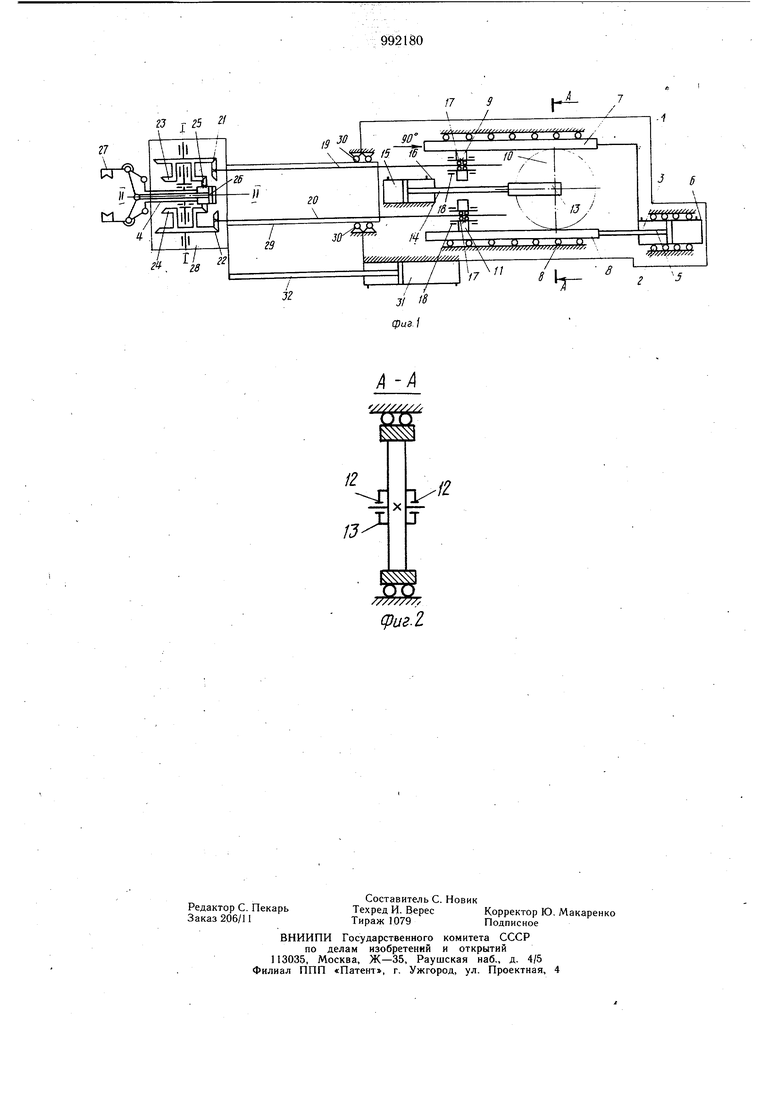
На фиг. 1 представлена кинематическая схема руки манипулятора; на фиг. 2 - сечение А-А на фиг. 1.
Рука манипулятора содержит корпус 1 в котором в Направляющих 2 качения установлен гидроцилиндр 3 вращения кисти 4. Шток 5 и корпус 6 гидроцилиндра 2 жестко связаны с зубчатыми рейками 7 и 8, размещенными в направляющих качения корпуса I, причем рейка 7 находится в зацеплении с зубчатыми колесами 9 и 10, а рейка 8 находится в зацеплении с зубчатыми колесами 10 и 11. Зубчатое колесо 10 (шестерня) при помощи подщипников 12 закреплено в серьге 13, жестко связанной со щтоком 1 гидроцилиндра 15 качения кисти 4. Корпус 16 гидроцилиндра 15 закреплен на корпусе 1. Зубчатые колеса 9 и 11 жестко закреллены на шариковых муфтах 17 передачи крутящего момента, которые на подшипниках 18 сидят в корпусе 1. Шариковые муфты 17 передают крутящий момент четырехгранным валам 19 и 20, которые при помощи конических зубчатых пар 21 и 22 и конических 23 и 24 передают движение выходной шестерне 25 дифференциала, жестко связанной с силовым цилиндром 26 привода 27 схвата. Корпус 28 кисти 4 закреплен на торце корытообразной штанги 29, которая установлена в корпусе 1 с помош.ью роликов 30. На корпусе 1 жестко закреплен гидроцилиндр 31 выдвижения руки, своим штоком 32 связанный со штангой 29. Рука манипулятора работает следующим образом. Выдвижение руки. Энергоноситель поступает в безштоковую полость гидроцилиндра 31 выдвижения руки. Шток 32 перемещается влево и перемещает влево корытообразную штангу 29 и четырехгранные валы 19 и 20. Валы 19 и 20 при выдвижении щтанги 29 движутся поступательно в шариковых муфтах 17 передачи крутящего момента. Для перемещения руки вправо энергоноситель поступает в штоковую полость гидроцилиндра 31. Качение кисти. Энергоноситель поступает в безштоковую полость гидроцилиндра 15. Шток 14 перемещается вправо и через серьгу 13 и подшипники 12 воздействует на цилиндрическое зубчатое колесо 10, которое также начинает перемещаться вправо. При этом зубчатые рейки 7 и 8 посредством жесткой связи со штоком 5 и корпусом 6 гидроцилиндра 3 оказываются жестко связаны между собой, так как обе полости гидроцилиндра 3 заперты клапаном (не показан), поэтому положение зубчатых реек 7 и 8 относительно друг друга в процессе работы гидроцилиндра 15 не меняется, а колесо 10 не вращается. Зубчатое колесо 10, воздействуя на зубчатые рейки 7 и 8, начинает одновременно перемещать их вправо и вместе с ними вращает зубчатые колеса 9 и 11 в противоположные направления, а последние через шариковые муфты 17 крутящего момента передают вращение четырехгранным валам 19 и 20, которые также начинают вращаться в противоположных Направлениях и через конические зубчатые пары 21 и 22 вращают конические колеса 23 и 24, но уже в одном направлении. Происходит поворот выходной щестерни 25 дифференциала и связанного с ней силового цилиндра 26 привода 27 схвата. Осуществляется качание кисти 4 вокруг оси I-I. Для изменения направления качения кисти 4 энергоноситель поступает в штоковую полость гидроцилиндра 15. Вращение кисти. Полости гидроцилиндра 15заперты, положение зубчатого колеса 10, серьги 13, щтока 14 относительно корпуса 16не меняется, т. е. зубчатое колесо 10 поступательно вдоль реек 7 и 8 не движется. Энергоноситель поступает в щтоковую полость гидроцилиндра 3. Шток 5 перемещается вправо, а корпус 6 влево. При этом зубчатые рейки 7 и 8 движутся поступательно в противоположные направления и начинают вращать зубчатые колеса 9 и 11 в одном направлении. Одновременно вращается колесо 10. Зубчатые колеса 9 и 11 через щариковые муфты 17 передачи крутящего момента вращают четырехгранные валы 19 и 20 в одном направлении, последние через конические зубчатые пары 21 и 22 заставляют вращаться конические колеса 23 и 24, но уже в противоположные Направления, которые вращают выходную щестерню 25 дифференциала и связанный с ней силовой цилиндр 26 привода 27 схвата. Осуществляется вращение кисти вокруг оси II-II. Для изменения направления вращения кисти энергоноситель поступает в безштоковую полость гидроцилиндра 3. Формула изобретения Рука манипулятора, содержащая корпус с выдвижной штангой, кисть с дифференциальной головкой, приводы, например гидроцилиндры, зубчато-реечный редуктор развязки движений кисти, валы с муфтами передачи движения сггредуктора к дифференциальной головке и направляющие качения, отличающаяся тем, что, с целью упрощения конструкции, зубчато-реечный редуктор выполнен в виде шестерни и диаметрально расположенных реек, которые зацеплены с муфтами передачи движения от редуктора к дифференциальной головке и жестко связаны с одним из гидроцилиндров, шток которого связан с одной рейкой, а гильза - с другой рейкой, причем указанный гидроцилиндр установлен в направляющих качения, а щток другого гидроцилиндра шарнирно связан с шестерней зубчато-реечного редуктора. Источники информации, принятые во внимание при экспертизе 1. Юревич Е. И., Аветиков Б. Г., Корытко О. Б. и др. Устройство промышленных роботов. Л., «Машиностроение, Ленинградское отделение, 1980, с. 255, рис. У 20.
q)uB2
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Кисть руки промышленного робота | 1981 |
|
SU1013256A1 |
| Рука манипулятора | 1980 |
|
SU908587A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| Кисть манипулятора | 1981 |
|
SU973347A1 |
| КЛЮЧ ДЛЯ СВИНЧИВАНИЯ И РАЗВИНЧИВАНИЯ ЗАМКОВЫХ СОЕДИНЕНИЙ СКВАЖИННЫХ ТРУБ | 2003 |
|
RU2268983C2 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО РОБОТИЗИРОВАННОЙ ЛИНИИ СБОРКИ-СВАРКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1990 |
|
SU1737838A1 |