сл го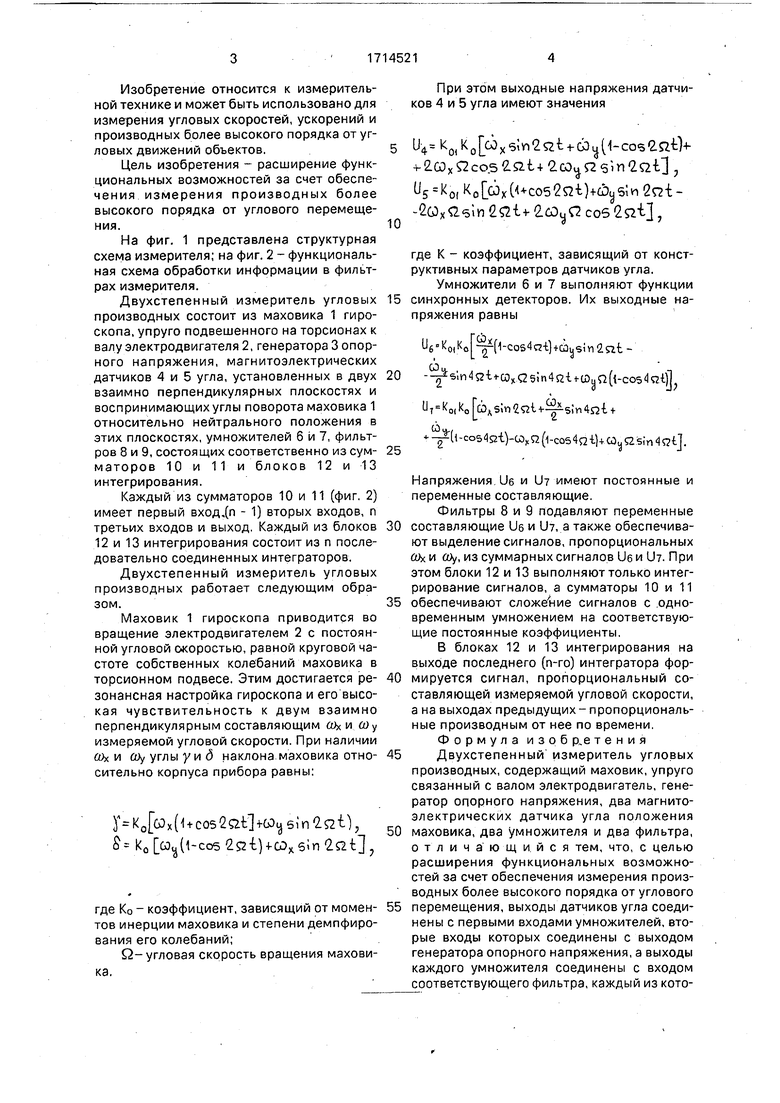
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОТАХОМЕТР | 2006 |
|
RU2325659C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
| Сейсмограф | 1986 |
|
SU1409954A1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2085849C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2007 |
|
RU2332642C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ СИГНАЛОВ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ВИБРАЦИОННОГО ТИПА | 2005 |
|
RU2282152C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2279634C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
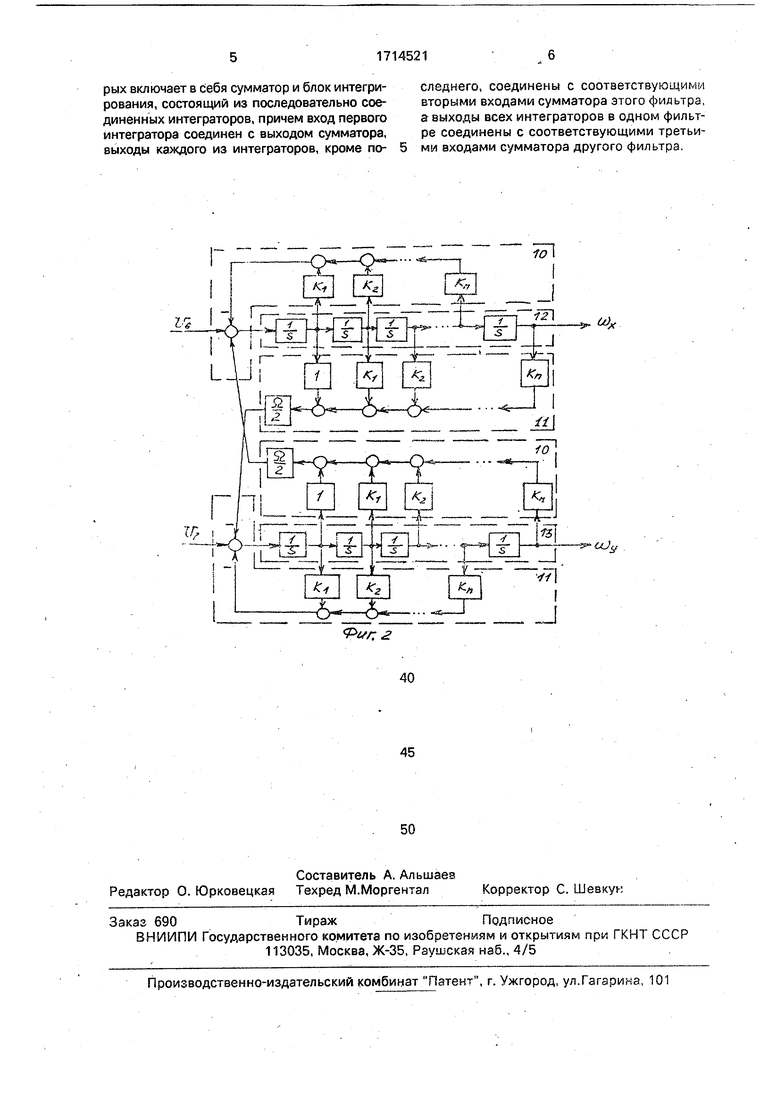
Изобретение относится к измерительной технике и может быть использовано для измерения угловых скоростей, ускорений и производных более высокого порядка от угловых движений объекта. Цель изобретения - расширение функуциональных возможностей за счет формирования сигналов, пропорциональных производным от углового движения. Маховик гироскопа 1, упругого подвешенный на торсионах к валу электродвигателя 2, вращается с постоянной угловой ско(эоСтью и находится в резонансном режиме. Сигналы с магнитоэлектрических датчиков угла 4 и 5 поступают на умножители 6 и 7, выполняющие функции синхронных детекторов, где в результате перемножения с сигналом генератора опорного напряжения 3 формируется сигнал, пропорциональный сумме ортогональных составляющих измеряемой угловой скорости. Далее сигнал с выхода умножителей 6 и 7 поступает на входы фильтров 8 и 9, включающих в себя сумматоры 10 и 11 и блоки интегрирования 12 и 13, на выходах которых и формируются сигналы, пропорциональные производным различных порядков от углового движения. 2 ил.*^••^vЁ
Фиг. 1 Изобретение относится к измерительной технике и может быть использовано для измерения угловых скоростей, ускорений и производных более высокого порядка от угловых движений объектов, Цель изобретения - расширение функциональных возможностей за счет обеспечения измерения производных более высокого порядка от углового перемещения. На фиг. 1 представлена структурная схема измерителя; на фиг. 2 - функциональная схема обработки информации в фильтрах измерителя. Двухстепенный измеритель угловых производных состоит из маховика 1 гироскопа, упруго подвешенного на торсионах к валу электродвигателя 2, генератора 3 опорного напряжения, магнитоэлектрических датчиков 4 и 5 угла, установленных в двух взаимно перпендикулярных плоскостях и воспринимающих углы поворота маховика 1 относительно нейтрального положения в этих плоскостях, умножителей 6 и 7, фильтров 8 и 9, состоящих соответственно из сумматоров 10 и 11 и блоков 12 и 13 интегрирования. Каждый из сумматоров 10 и 11 (фиг. 2) имеет первый вход,(п - 1) вторых входов, п третьих входов и выход. Каждый из блоков 12 и 13 интегрирования состоит из п последовательно соединенных интеграторов. Двухстепенный измеритель угловых производных работает следующим образом. Маховик 1 гироскопа приводится во вращение электродвигателем 2 с постоянной угловой скоростью, равной круговой частоте собственных колебаний маховика в торсионном подвесе. Этим достигается резонансная настройка гироскопа и его высокая чувствительность к двум взаимно перпендикулярным составляющим и бОу измеряемой угловой скорости. При наличии й)х и й ууглыуи 5 наклона маховика относительно корпуса прибора равны: (ltC052Qt +60,5inZ 2t), & (l-C052j2-t)+C0 5in2at где Ко коэффициент, зависящий от моментов инерции маховика и степени демпфирования его колебаний; Q-угловая скорость вращения маховика. При этом выходные напряжения датчиков 4 и 5 угла имеют значения U4 4i o x5lvi2s t Q(1-cosZ5 tV -ь2СОх со.52.а142оЭ 25Г|2С21., o cJxO C052S2t)+ Dy5;H 2Qt-2cOx 5in Q.Qi 2.6DyQ co5 2s2i, где К - коэффициент, зависящий от конструктивных параметров датчиков угла. Умножители 6 и 7 выполняют функции синхронных детекторов. Их выходные напряжения равны Ufil oiKo fl-cos cjil+cbysiviilnt--2 5;n4 itCO Q5in4s2it.({-co5 lnt)j ,,5;п2 г1 5;п4п4 + -2(bcos4si)-co,n(i-co54ni)4CO,jS2s;n t tJ. Напряжения, Ue и U имеют постоянные и переменные составляющие. Фильтры 8 и 9 подавляют переменные составляющие Ue и U, а также обеспечивают выделение сигналов, пропорциональных бОх и бОу, из суммарных сигналов Ue и У. При этом блоки 12 и 13 выполняют только интегрирование сигналов, а сумматоры 10 и 11 обеспечивают сложение сигналов с .одновременным умножением на соответствующие постоянные коэффициенты. В блоках 12 и 13 интегрирования на выходе последнего (п-го) интегратора формируется сигнал, пропорциональный составляющей измеряемой угловой скорости, а на выходах предыдущих - пропорциональные производным от нее по времени. Формула изоб р.е тения Двухстепенный измеритель угловых производных, содержащий маховик, упруго связанный с валом электродвигатель, генератор опорного напряжения, два магнитоэлектрических датчика угла положения маховика, два умножителя и два фильтра, отличающийся тем, что, с целью расширения функциональных возможностей за счет обеспечения измерения производных более высокого порядка от углового перемещения, выходы датчиков угла соединены с первыми входами умножителей, вторые входы которых соединены с выходом генератора опорного напряжения, а выходы каждого умножителя соединены с входом соответствующего фильтра, каждый из которых включает в себя сумматор и блок интегрирования, состоящий из последовательно соединенных интеграторов, причем вход первого Интегратора соединен с выходом сумматора. выходы каждого из интеграторов, кроме по- 5 следнего, соединены с соответствующими вторыми входами сумматора этого фильтра, а выходы всех интеграторов в одном фильтре соединены с соответствующими третьими входами сумматора другого фильтра.
| Новиков Л.З., Шамалов М.Ю | |||
| Механика динамически настраиваемых гироскопов | |||
| - М.: Наука, 1985^ с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гироскопические системы | |||
| - М.: Машиностроение, 1983, с | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
