Изобретение относится к области авиационной техники и, в частности, к измерительным приборам определения угловой ориентации самолета относительно вертикали места и вектора скорости полета. Оно может быть использовано для повышения надежности определения углов атаки и тангажа при отказе одного из измерителей этих углов в безызбыточном комплексе бортового оборудования самолета. Возможно применение изобретения для малоразмерных, дистанционных, беспилотных летательных аппаратов с упрощенным оборудованием и минимальным числом измерителей систем управления. Для самолетов обычного состава приборного оборудования применение изобретения может уменьшить радиолокационную заметность и улучшить эксплуатационные характеристики самолета из-за устранения на его фюзеляже выступающих малонадежных элементов - флюгеров аэрометрических измерителей углов атаки.
Известны маятниковые устройства для определения угловой ориентации самолета и, в частности, определения его угла тангажа [1, с.152; 2, с.130; 3, с.6]. Они содержат маятник, центр подвеса которого выше его центра тяжести. В том случае, когда маятник - магнит картушка помещен в поддерживающую жидкость, она уменьшает влияние трения подвеса. Жидкость обеспечивает и демпфирование колебаний маятника. При угловом отклонении самолета маятник сохраняет свою ориентацию по вертикали места, что позволяет определять угол тангажа, как угол между продольной осью корпуса самолета (корпуса маятника) и плоскостью горизонта, имитируемого маятником - магнитом картушкой. Наиболее совершенным устройством этого типа является курсогоризонт КГ-1Б [2, с. 130]. Он выдает только визуальную информацию о тангаже при равномерном, прямолинейном полете и является полностью автономным, резервным прибором на современных отечественных самолетах. Погрешность определения угловой ориентации 3-5 угл. град. Надежность прибора высокая, а вес (0,4 кг) и габариты (0,6 дм3) - минимальные. Ускорения, виражи самолета приводят к очень большим ошибкам его работы. Устройство не определяет угол атаки самолета.
Известно устройство гировертикаль с маятниковой коррекцией типа авиагоризонт бомбардировщика АГБ, авиагоризонт резервный АГР, малогабаритная гировертикаль МГВ [1, с.158; 2] для определения угловой ориентации самолета. Устройство содержит трехстепенной гироскоп, маятниковую вертикаль на корпусе гиромотора, двигатели коррекции по осям карданова подвеса, входы которых соединены с выходами маятниковой вертикали. При отклонении гироскопа от вертикали маятниковая вертикаль выдает сигналы на двигатели коррекции и гиромотор прицессирует в кардановом подвесе до момента совмещения вектора кинетического момента гиромотора с вертикалью места. Устройство измеряет углы тангажа и крена самолета по сигналам с датчиков углов, расположенных по осям карданова подвеса. Ускорения и виражи самолета приводят к ошибкам работы прибора. Точность прибора сравнительно высока и составляет 0,2-2,5 угл. град, что удовлетворяет современным требованиям авиации. Вес (1,8-9,6 кг), габариты (1,8-7 дм3), энергопотребление гировертикали велики, что в основном связано с наличием гиромотора и карданова подвеса. Надежность (1500-2000 ч) определяется электромеханическим принципом работы устройства и может быть недостаточной для безопасного управления самолетом [4, 5]. Гировертикаль не определяет угол атаки самолета.
Известно устройство инерциальная вертикаль типа инерциальная курсовертикаль ИКВ, платформа гироскопическая ПГ-1 [1, с.159; 2, 7], содержащее гиростабилизированную платформу с гироскопами и акселерометрами. Принцип действия устройства основан на интегральной коррекции, при которой сигналы „горизонтальных" акселерометров платформы подаются на двигатели коррекции соответствующих гироскопов через интеграторы. При этом ускорения самолета не вызывают погрешностей определения угла тангажа в устройстве. Инерциальная вертикаль является частью инерциальной навигационной системы, точность работы которой на борту самолета наивысшая (0,1-0,3 угл.град), но вес (20-30 кг) и габариты (25-60 дм3) очень большие. Надежность (1000-3000 ч), как и у гировертикали, определяется сложностью электромеханической части устройства. Инерциальная вертикаль не может определять угол атаки самолета.
Известно устройство дублер авиагоризонта типа ДА-30, ДА-200 [6, с.42; 7, с.5]. Оно содержит двухстепенной гироскоп с пружиной и демпфером, ось прицессии которого через передаточный механизм связана со стрелкой. Шкала прибора имеет оцифровку в углах крена, хотя он измеряет угловую скорость рыскания. При скорости полета, равной значению, указанному на шкале, и повороте самолета без потери высоты и скольжения гироскоп поворачивается на угол, равный крену самолета. То есть угловая ориентация самолета по углу крена определяется через измерение угловой скорости рыскания. Устройство обладает высокой надежностью (5000 ч), меньшим весом (2 кг) и габаритами (1,3 дм3), чем гировертикаль. Оно широко применяется, как резервный прибор угловой ориентации на легких самолетах. Однако точность его работы низкая. При традиционной оценке по половине деления шкалы она составляет 7,5 угл. град. Угол тангажа прибор не определяет, а лишь качественно его оценивает по измерению скорости снижения (подъема) с помощью встроенного вариометра, при отрицательном (положительном) угле тангажа.
Известен флюгерный датчик аэродинамических углов типа датчик углов атаки и скольжения ДУАС, датчик угла скольжения ДУС [1, с.274; 8, с.40] для определения угловой ориентации самолета относительно вектора скорости - датчик угла атаки. Устройство содержит внешне расположенный флюгер на подшипниковой опоре в корпусе самолета. Ось вращения флюгера соединена с потенциометром или синусно-косинусным трансформатором в корпусе самолета, служащим для съема сигнала, пропорционального углу атаки. Предпочтительно местоположение флюгерного датчика в носовой части фюзеляжа - зоне наименее возмущенной воздушной среды. Его основное преимущество - простота конструкции. Однако флюгер подвержен большому числу разрушающих воздействий, ухудшает эксплуатацию, обслуживание и радиолокационную заметность самолета. Он является одним из самых малонадежных авиационных приборов (100-500 ч), а точность (0,3-1 угл. град) определения истинного угла атаки низкая из-за сложного характера скоса потока воздуха на корпусе самолета [9, с.87]. Проблемным является конструктивное расположение флюгерного датчика в носовой части самолета, где приоритетно устанавливается радиолокатор и другие радиосистемы. Вес (0,9-3 кг) и габариты (1-28 дм3) флюгерного датчика сравнительно велики.
Известен пневмомеханический датчик аэродинамических углов типа ДАУ [9, с.74; 10; 11], содержащий цилиндрический штырь - чувствительный элемент, расположенный вне корпуса самолета в набегающем потоке воздуха. На его поверхности по образующей, симметрично оси потока, расположены щели, связанные каналами с приемниками давления. Несимметрия давления фиксируется приемниками и в диапазоне рабочих углов пропорциональна углу атаки самолета. Важное преимущество прибора - отсутствие подвижного внешне расположенного флюгера и большая точность (0,15-0,3 угл. град). Однако, как и флюгерный датчик, он имеет ошибки от скоса потока и выступающий на корпусе самолета штырь. Это создает дополнительные проблемы с эксплуатацией, обслуживанием и радиолокационной заметностью самолета, качеством их работы в высокотемпературном, изменяющемся по направлению потоке воздуха.
Известно устройство для определения угла атаки самолета [12, с.153], содержащее измерители скорости полета, угловой скорости по поперечной оси связанной системы координат, перегрузки по нормальной оси и косинуса крена, вместе с измерителем исходного угла атаки, сумматором, двумя схемами вычитания, интегратором и делителем. По разности сигналов перегрузки и косинуса крена, деленных на сигнал, пропорциональный скорости полета, и умноженных на величину ускорения силы тяжести, оно определяет угловую скорость изменения угла наклона траектории. Далее угол атаки получается как сумма исходного угла атаки и проинтегрированного сигнала разности угловой скорости по поперечной оси связанной системы координат и угловой скорости изменения угла наклона траектории. Точность работы устройства невелика из-за накапливающейся ошибки при интегрировании сигналов датчиков скорости, угловой скорости, перегрузки, косинуса крена, схем вычитания и делителя. Устройство обладает большим весом, габаритами и низкой надежностью, поскольку требует для своей работы большого числа датчиков на борту самолета.
Наиболее близким из числа известных технических решений является устройство дня определения угловой ориентации самолета [13, с.303, рис. 3,4], содержащее два акселерометра, умножитель, сумматор, интегратор и функциональный преобразователь. Ось чувствительности первого акселерометра направлена по нормальной оси связанной системы координат, а его выход подключен к первому входу умножителя, выход которого соединен с первым вычитающим входом сумматора. Ось чувствительности второго акселерометра расположена в продольной плоскости симметрии и направлена под углом к продольной оси связанной системы координат, а его выход подключен ко второму суммирующему входу сумматора. Выход последнего, через последовательно соединенные интегратор и функциональный преобразователь, соединен со вторым входом умножителя. Выход интегратора является выходом устройства. Работа устройства основана на априорной информации о зависимости аэродинамических сил, действующих на самолет, а значит, и перегрузок от его углов атаки и широкого диапазона скоростей полета. Определение угловой ориентации самолета - его угла атаки, здесь ведется без малонадежных измерителей на корпусе, в набегающем потоке. Эксплуатация и обслуживание самолета улучшается, так как нет выступающих элементов (флюгера, штыря) с дополнительными заглушками и чехлами, которые должны его надежно защищать на земле и обязательно удаляться перед полетом техническим персоналом.
Недостатком известного устройства - прототипа является ограниченность его применения, состоящее только в планирующем, баллистическом полете самолета без тяги его двигателей. Акселерометры должны устанавливаться вблизи центра масс самолета для инвариантности их измерений от угловых движений самолета, что крайне затруднено для реального самолета. Точность устройства сравнительно невелика, так как линейные и угловые вибрации корпуса самолета будут существенно ухудшать работу акселерометров. При этом виброизоляция амортизаторами и низкочастотная фильтрация их выходных сигналов неизбежно сузят динамический диапазон измерения перегрузок [14, с.136, 158, 174]. Устройство способно определять угловую ориентацию самолета только по углу атаки.
Причиной, препятствующей получению указанного ниже технического результата при использовании известного устройства - прототипа, является ограничение режимов полета самолета, для обеспечения работоспособности устройства. Зависимость точности работы акселерометров от их положения на самолете создает дополнительные трудности в реализации устройства.
Основной задачей, на решение которой направлен заявляемый объект - устройство для определения угловой ориентации самолета, является повышение точности и надежности определения углов атаки или тангажа при наименьших массогабаритных показателях приборного оборудования.
Указанный технический результат достигается тем, что в устройство для определения угловой ориентации самолета, содержащее последовательно соединенные сумматор и интегратор, выход которого является выходом устройства, введены первый, второй, третий усилители и дифференциатор, вход первого усилителя соединен с выходом интегратора, а выход - с первым вычитающими входом сумматора, вход дифференциатора соединен с выходом второго усилителя, а выход - со вторым суммирующим входом сумматора, третий суммирующий вход которого соединен с выходом третьего усилителя, подключенного к выходу второго усилителя, вход которого соединен с выходом датчика угловой ориентации.
Совокупность существенных признаков изобретения: первого, второго, третьего усилителя, дифференциатора и связей между ними обеспечивают достижение технического результата, достигаемого при осуществлении изобретения - устройства для определения угловой ориентации самолета. При этом сущность изобретения заключается в формировании динамически и статически подобных сигналов в устройстве по выходным сигналам датчика тангажа или датчика угла атаки с учетом их временных запаздываний и масштабных изменений относительно друг друга на различных этапах полета самолета.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественным всем признакам заявленного устройства для определения угловой ориентации самолета, отсутствуют, следовательно, заявленное изобретение соответствует условию „новизна". Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата и изобретение не основано на:
- дополнении известного устройства - аналога какой-либо известной частью, присоединенной к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства - аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- исключении какой-либо части устройства - аналога с одновременным исключением, обусловленным ее наличием функции, и достижением обычного для такого исключения результата;
- увеличением количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства - аналога или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создание устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставлении таких признаков во взаимосвязи либо изменение вида взаимосвязи, если известен факт влияния каждого из них на технический результат и новые значения этих признаков или их взаимосвязь могли быть получены, исходя из известных зависимостей, следовательно, заявленное изобретение соответствует „изобретательскому уровню".
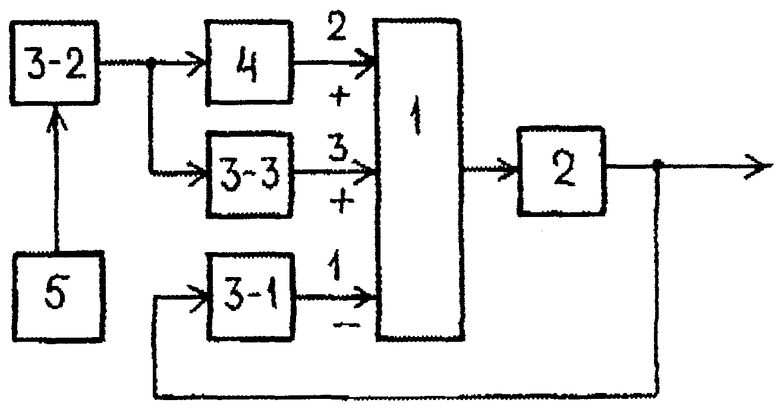
Сущность изобретения поясняется чертежом, где приведена структурная схема устройства для определения угловой ориентации самолета и приняты следующие обозначения:
1 - сумматор;
2 - интегратор;
3-1, 3-2, 3-3 - первый, второй, третий усилители;
4 - дифференциатор,
5 - датчик угловой ориентации.
Устройство для определения угловой ориентации самолета содержит последовательно соединенные сумматор 1 и интегратор 2, выход которого является выходом устройства. Оно также содержит первый усилитель 3-1, второй усилитель 3-2, третий усилитель 3-3 и дифференциатор 4 так, что вход первого усилителя 3-1 соединен с выходом интегратора 2, а выход - с первым вычитающим входом сумматора 1. Вход дифференциатора 4 соединен с выходом второго усилителя 3-2, а выход - со вторым суммирующим входом сумматора 1, третий суммирующий вход которого соединен с выходом третьего усилителя 3-3, подключенного к выходу второго усилителя 3-2. Вход второго усилителя 3-2 соединен с выходом датчика 5 угловой ориентации.
Практическая реализация заявляемого устройства для определения угловой ориентации самолета предпочтительна программными средствами бортовой вычислительной машины, например типа ЦВМ80-4ХХ [15, с.14, 16, с.96-97, 106], или в микросхемном исполнении так, что сумматор 1, интегратор 2, усилители 3-1, 3-2, 3-3, дифференциатор 4 строятся на микросхемах типа К140УД8 [17, с.270-272, 286; 18, с.75-84]. Возможно применение активных или пассивных электрических звеньев [19, с.442-444]. Датчиками 5 угловой ориентации, если устройство определяет угол тангажа самолета, могут быть, например, датчики угла атаки типа: ДУАС-64, ДУС-3, ДУAC-9, ДАУ-72, ДАУ-85 и др. В том случае, когда оно применяется для определения угла атаки самолета, то датчиками 5 угловой ориентации могут быть, например, датчики тангажа типа: ИКВ-72, МГВ-1, МГВ-4, ПГ-1В, АГБ-3, ИКВ-802 и др. [2, с.78, 115, 128; 7 и др.].
Структура устройства для определения угловой ориентации самолета получается из дифференциального уравнения продольного движения летательного аппарата по нормали к траектории в скоростной системе координат [15, с.19]

где m - масса ЛА; V - скорость полета; Θ - угол наклона траектории; Р - сила тяги двигателя; α - угол атаки; Y - подъемная сила; G - сила тяжести (вес) ЛА; YB - возмущающая сила на ЛА; υ - угол тангажа.
Рассматривая слабовозмущенное движение с малыми приращениями переменных: Δ V, Δ α , Δ υ , Δ Θ ,... , можно записать:


где V0, α 0, υ 0, Θ 0, P0,... - постоянные, установившиеся значения параметров движения ЛА; g - ускорение силы тяжести;  - частная производная подъемной силы по углу атаки при установившемся движении ЛА. После подстановки (5) в (4), при малых углах наклона траектории, получаем
- частная производная подъемной силы по углу атаки при установившемся движении ЛА. После подстановки (5) в (4), при малых углах наклона траектории, получаем


или в операторной форме, учитывая, что pΔ υ =p(υ 0+Δ υ )=pυ

Приращение угла атаки Δ α в левой части (8) связано с полным значением этого угла α , в общем виде, следующим соотношением

После подстановки (9) в (8) и преобразования окончательно получаем соотношения, положенные в основу работы заявляемого устройства для определения угловой ориентации самолета,

где  - определяемые устройством угловой ориентации оценки: либо угла
- определяемые устройством угловой ориентации оценки: либо угла  атаки, по выражению (10) при датчике 5 угловой ориентации - датчике угла υ тангажа, либо угла
атаки, по выражению (10) при датчике 5 угловой ориентации - датчике угла υ тангажа, либо угла  тангажа по выражению (11) при датчике 5 угловой ориентации - датчике угла α атаки. При этом k, ω 2 - параметры, получаемые предварительно, при параметрической оптимизации
тангажа по выражению (11) при датчике 5 угловой ориентации - датчике угла α атаки. При этом k, ω 2 - параметры, получаемые предварительно, при параметрической оптимизации  функций (10) или (11), для всех опытных υ или α на этапе установившегося движения самолета [16, с.307, 895].
функций (10) или (11), для всех опытных υ или α на этапе установившегося движения самолета [16, с.307, 895].
Устройство для определения угловой ориентации самолета работает следующим образом. При определении угла α атаки в нем реализуется выражение (10) так, что сигнал, пропорциональный углу υ тангажа, поступает с выхода датчика 5 угловой ориентации самолета на вход второго усилителя 3-2. После усиления сигнал, пропорциональный kυ , с выхода второго усилителя 3-2, поступает на входы дифференциатора 4 и третьего усилителя 3-3. Продифференцированный сигнал с выхода дифференциатора 4, пропорциональный kpυ , поступает на второй суммирующий вход сумматора 1. На третий также суммирующий вход сумматора 1 поступает и выходной сигнал третьего усилителя 3-3, пропорциональный kω 2 υ. Одновременно на первый вычитающий вход сумматора 1 поступает выходной сигнал первого усилителя 3-1, пропорциональный  , а, где
, а, где  - оценка угла α атаки. После суммирования сигналов, пропорциональных
- оценка угла α атаки. После суммирования сигналов, пропорциональных  в сумматоре 1, его выходной сигнал поступает на вход интегратора 2. Интегрирование суммы этих сигналов в интеграторе 2 дает искомую оценку
в сумматоре 1, его выходной сигнал поступает на вход интегратора 2. Интегрирование суммы этих сигналов в интеграторе 2 дает искомую оценку  угла атаки, сигнал пропорциональный которой поступает на вход первого усилителя 3-1 и выход устройства. При определении угла и тангажа реализуется выражение (11) так, что сигнал, пропорциональный углу ее атаки, поступает с выхода датчика 5 угловой ориентации самолета на вход второго усилителя 3-2. После усиления сигнал, пропорциональный
угла атаки, сигнал пропорциональный которой поступает на вход первого усилителя 3-1 и выход устройства. При определении угла и тангажа реализуется выражение (11) так, что сигнал, пропорциональный углу ее атаки, поступает с выхода датчика 5 угловой ориентации самолета на вход второго усилителя 3-2. После усиления сигнал, пропорциональный  , с выхода второго усилителя 3-2 поступает на входы дифференциатора 4 и третьего усилителя 3-3. Продифференцированный сигнал с выхода дифференциатора 4, пропорциональный
, с выхода второго усилителя 3-2 поступает на входы дифференциатора 4 и третьего усилителя 3-3. Продифференцированный сигнал с выхода дифференциатора 4, пропорциональный  , поступает на второй суммирующий вход сумматора 1. На третий также суммирующий вход сумматора 1 поступает и выходной сигнал третьего усилителя 3-3, пропорциональный
, поступает на второй суммирующий вход сумматора 1. На третий также суммирующий вход сумматора 1 поступает и выходной сигнал третьего усилителя 3-3, пропорциональный  . Одновременно на первый вычитающий вход сумматора 1 поступает выходной сигнал первого усилителя 3-1, пропорциональный
. Одновременно на первый вычитающий вход сумматора 1 поступает выходной сигнал первого усилителя 3-1, пропорциональный  , где
, где  - оценка угла и тангажа. После суммирования сигналов, пропорциональных
- оценка угла и тангажа. После суммирования сигналов, пропорциональных  в сумматоре 1, его выходной сигнал поступает на вход интегратора 2. Интегрирование суммы этих сигналов в интеграторе 2 дает искомую оценку и угла тангажа, сигнал пропорциональный которой поступает на вход первого усилителя 3-1 и выход устройства.
в сумматоре 1, его выходной сигнал поступает на вход интегратора 2. Интегрирование суммы этих сигналов в интеграторе 2 дает искомую оценку и угла тангажа, сигнал пропорциональный которой поступает на вход первого усилителя 3-1 и выход устройства.
Предлагаемое устройство обладает повышенной эффективностью, так как способствует интеллектуализации комплекса бортового оборудования самолета. Оно может определять и угол атаки, и угол тангажа, создавая в БЦВМ виртуальные датчики углов по выражениям (10), (11). Это прежде всего позволяет повысить надежность и точность определения углов тангажа и атаки. Так, если датчик тангажа ИКВ - 802, датчик угла атаки ДУ АС-64, а ЦВМ80-4ХХ, то среднее время безотказной оценки угла атаки составляет 1875 ч, что в 3,75 раза больше, чем время безотказной работы ДУ АС-64. Виртуальный датчик тангажа на ДУ АС-64 и ЦВМ80 будет иметь среднее время безотказной оценки 455 ч. Это меньше времени безотказной работы ИКВ, но в 228 раз больше среднего времени одного полета, что важно для создания приборной отказоустойчивости комплекса. Точность оценки угла атаки в наибольшей мере определяется точностью ИКВ и составляет 0,3 угл. град. Аналогичная точность и оценки угла тангажа. Комплексирование одноименных сигналов измерителей и виртуальных датчиков в безызбыточном составе оборудования самолета позволяет дополнительно повысить точность измерения угловой ориентации. Для угла атаки из-за того, что оценка угла атаки не зависит от турбулентностей, температурных воздействий и скосов потока на корпусе самолета. Для угла тангажа из-за устранения сбоев и выбросов от ударов и инерционных возмущений на гироскопы ИКВ. Выбросы и погрешности фильтруются по одноименным сигналам, полученным от датчиков различного физического принципа действия. Точность оценки угла тангажа может достигать 0,1-0,3 угл.град в прямолинейном, горизонтальном полете. Применение предлагаемого устройства позволяет устранить флюгеры и штыри на корпусе самолета при оценке угла атаки виртуальным датчиком. Это приводит к снижению веса (18% веса ИКВ+ДУАС+ЦВМ при обычном дублировании датчика угла атаки), габаритов (6% того же состава) и энергопотребления. Улучшается контролепригодность аппаратуры. Для легких, маневренных самолетов возможно существенное снижение их радиолокационной заметности при устранении флюгеров и штырей на корпусе. Материал, размеры, местоположение которых способствуют повышенной эффективной поверхности рассеивания самолета. Улучшаются условия эксплуатации, обслуживания, аэродинамика самолета с полностью конформным расположением приборов. Уменьшение веса (69% от веса ИКВ+ДУАС+ЦВМ), габаритов (40% того же состава) еще заметнее при замене датчика тангажа ИКВ его виртуальным аналогом по выражению (11). Это целесообразно лишь при отказах, ввиду многофункциональных свойств этого прибора на самолете. При реализации малоразмерного устройства определения угловой ориентации по углу тангажа на основе только датчика угла атаки открывается возможность по созданию простых, дешевых и надежных безгироскопных систем управления дистанционно пилотируемых летательных аппаратов. Микропроцессорная или аналоговая микросхемная реализация устройства здесь имеет вид простейшего фильтра на выходе датчика угла атаки. Характеристики БЦВМ не имеют критического значения для применения на борту самолета предлагаемого устройства, так как задача решается параллельно основным функциям вычислителя и не требует больших затрат его ресурсов.
Таким образом, приведенные сведения показывают, что при осуществлении заявляемого изобретения выполняются следующие условия:
- средство, воплощающее изобретение при его осуществлении, предназначено для использования в области авиационной техники и, в частности, для определения угловой ориентации самолета относительно вертикали места и вектора скорости полета;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности „промышленная применимость".
Источники информации
1. Селезнев В.П. Навигационные устройства - М.: Машиностроение, 1974 г., 600с.
2. Авионика России: Энциклопедический справочник /Под общ. ред. С.Д.Бодрунова. СПб.: Национальная Ассоциация авиаприборостроителей, 1999 г., 780с.
3. Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет) - М.: Высш. школа, 1976 г., 304с.
4. Дюпин С. Самолет погубил автопилот //Коммерсантъ. №214, 2001 г., с.3.
5. Аралов Г.Д. Неисправность прибора привела к катастрофе самолета BOEING //Проблемы безопасности полетов. №10, 2002 г., с.18.
6. Белогородский С.Л. Автоматизация управления посадкой самолета - М.: Транспорт, 1972 г., 352с.
7. Алтухов В.Ю., Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация. - М.: Машиностроение, 1991 г., 160с.
8. Солдаткин В.М. Методы и средства измерения аэродинамических углов летательных аппаратов. - Казань: Изд. Казан-гос. техн. ун-та, 2001 г., 448с.
9. Летные испытания систем пилотажно-навигационного оборудования /Е.Г.Харин, П.М.Цветков, В.К.Волков и др. - М.: Машиностроение, 1986 г., 136с.
10. Датчики аэродинамических углов. Приемники воздушных давлений. Система восприятия воздушных данных. Проспект фирмы „Авиаприбор",
11. А.с. 292862 СССР. МКИ G 01 p 13/00. Способ измерения направления воздушного потока /Б.М.Абрамов //Б.И. 1971, №5.
12. Пашковский И.М., Леонов В.А, Поплавский Б.К. Летные испытания самолетов и обработка результатов испытаний." М.: Машиностроение, 1985 г., 416с.
13. Петров Б.Н. Избранные труды. - М.: Наука, 1983 г., т. 2. Управление авиационными и космическими аппаратами. 328с. (ПРОТОТИП).
Петров Б.Н., Студнев Р.Б., Крымов А.Б., Горбатенко В.В., Ершов В.П. Определение углов атаки и скольжения по сигналам акселерометров, установленных на борту летательных аппаратов //Изв. АН СССР. Приборостроение, 1975 г., т. 13, №10, с.62-67.
14. Гудков А.И., Лешаков П.С. Методы и техника летных испытаний самолетов на прочность. - М.: Машиностроение, 1971 г., 248с.
15. Реферативный журнал. Воздушный транспорт, №12, 1990 г., с.14.
16. Цифровые процессоры обработки сигналов: Справочник /А.Г.Остапенко, С.И.Лавлинский, А.Б.Сушков и др.; Под ред. А.Г.Остапенко. - М.: Радио и связь, 1994 г., 264с.
17. Аналоговые и цифровые интегральные микросхемы: Справочное пособие /С.В.Якубовский, Н.А.Барканов, Л.И.Несельсон и др. /Под ред. С.В.Якубовского, 2-е изд. - М.: Радио и связь, 1984 г., с.432.
18. Алексенко А.Г., Коломбет Е.А., Стародуб Г.Н. Применение прецизионных аналоговых ИС. - М.: Радио и связь, 1981 г., 224с.
19. Бесекерский В.А. Цифровые автоматические системы. - М.: Наука, 1976 г., 576с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2241247C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2010 |
|
RU2440595C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| УСТРОЙСТВО ДЛЯ КОМПЛЕКСНОГО КОНТРОЛЯ ДАТЧИКОВ ПОДВИЖНОГО ОБЪЕКТА | 2011 |
|
RU2461040C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС САМОЛЕТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570339C1 |
| УСТРОЙСТВО КОМПЛЕКСНОГО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2014 |
|
RU2546076C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2486527C2 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
Изобретение относится к области авиационной техники, в частности к измерительным приборам определения угловой ориентации самолета относительно вертикали места и вектора скорости полета. Технический результат - повышение достоверности информации об ориентации самолета при минимальном весе и габаритах приборного комплекса. Для достижения данного результата устройство состоит из сумматора, интегратора, дифференциатора, трех усилителей и датчика угловой ориентации, с помощью которых происходит преобразование динамически подобных сигналов датчика тангажа или датчика угла атаки. 1 ил.
Устройство для определения угловой ориентации самолета, содержащее последовательно соединенные сумматор и интегратор, выход которого является выходом устройства, отличающееся тем, что в него введены первый, второй, третий усилители и дифференциатор, вход первого усилителя соединен с выходом интегратора, а выход - с первым вычитающим входом сумматора, вход дифференциатора соединен с выходом второго усилителя, а выход - со вторым суммирующим входом сумматора, третий суммирующий вход которого соединен с выходом третьего усилителя, подключенного к выходу второго усилителя, вход которого соединен с выходом датчика угловой ориентации.
| Петров Б.Н | |||
| Избранные труды | |||
| Управление авиационными и космическими аппаратами | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М.: Наука, 1983 г., с.303-305 | |||
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2000 |
|
RU2166735C1 |
| КОМБИНИРОВАННЫЙ СПОСОБ ФОРМИРОВАНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И НАБЛЮДАЕМОГО С ЕГО БОРТА ОБЪЕКТА В СТАБИЛИЗИРОВАННОЙ СИСТЕМЕ КООРДИНАТ, КОМПЛЕКСНАЯ СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2207513C1 |
| Способ упрочняющей обработки деталей | 1988 |
|
SU1595927A1 |
| US 3983474 A, 28.09.1976. | |||

