31715682
Изобретение относится к устройствам
транспортировки материалов в системе очистки буровых растворов для очистки танков и может использоваться .в области нефтегазовой промышленности для транспортировки сыпучих материалов и вязких жидкостей, очистки емкостей и амбаровs разгрузочно-по- грузочных работ.
Известно устройство для подачи сыпучих материалов от элеватора, содержащее корпус, заборный короб8 два перпендикулярно размещенных шнека.
Недостатками известного устройства является низкая эффективность из-за того, что оно может транспортировать только хорошо сыпучие материалы, конструкция не обеспечивает самоочистки шнеков и передача материала осуществляется на небольшие растояния,
Известен ленточный транспортер дл погрузочных работ, установленный на вагонетке и содержащий гибкую ленту, которая является одновременно грузо- несущим и тяговым органом,
К недостаткам устройства можно .отнести узкую область применения, так как транспортер способен перемещать только насыпные и штучные грузы
Известен также гибкий винтовой конвейер, содержащий внутри гибкого кожуха рабочий орган - гибкий шнек, вдоль которого перемещается транспортируемый материал. Гибкий шнек состоит из отдельных секций, сочлененных между собой шарнирно, что позволяет в определенных пределах искривлять ось вращения шнека и тем самым изменять направление движения транспортируемого материала.
А где г, г2
радиусы противоположно размещенных Недостатками данного конвейера я 45 ДУГ м; А - расстояние между осями
0
5
0
5
0
5
0
Недостатками данного транспортера являются низкая эффективность устройства, обусловленная конструкцией заборного участка, так как от его конструкции зависит питание спирально-винтового транспортера, его производительность. Имеет место также большой износ спирали в месте ее контакта с металлическим заборным участком.
Цель изобретения - повышение производительности устройства и надежности работы.
Поставленная цель достигается тем, что шнековый механизм соединен с заборным приспособлением, которое выполнено в виде корпуса и размещенных в нем рабочих органов. Рабочие органы заборного приспособления выполнены в виде по меньшей мере двух вза- мозацепляющихся винтов с возможностью. вращения в одном направлении, Корпус заборного приспособления выполнен в виде по меньшей мере двух пересекающихся по образующим усеченных конусов с параллельными осями с большими основаниями у входного окна и по меньшей мере двух пересекающихся по образующим цилиндров, оси которых совпадают с осями пересекающихся усеченных конусов.
Рабочая поверхность каждого взаимозацепляющегося винта выполнена в виде конической спирали, профиль которой в плоскости сечения нормальной к оси вращения винтов образует симметричные геометрические фигуры из сопряжения четырех дуг, радиусы двух из которых, противоположно размещенных, с общим центром на оси симметрии каждой фигуры, определяется из
А где г, г2 соотношения г, + г/
| название | год | авторы | номер документа |
|---|---|---|---|
| ШНЕКОВЫЕ ЭЛЕМЕНТЫ С УЛУЧШЕННОЙ ЭФФЕКТИВНОСТЬЮ ДИСПЕРГИРОВАНИЯ И УМЕНЬШЕННЫМ ПОСТУПЛЕНИЕМ ЭНЕРГИИ | 2009 |
|
RU2516172C2 |
| ОДНОХОДОВЫЕ ШНЕКОВЫЕ ЭЛЕМЕНТЫ С УМЕНЬШЕННЫМ НАКЛОНОМ ЛИНИИ ГРЕБНЯ | 2009 |
|
RU2531279C2 |
| СПОСОБ ЭКСТРУЗИИ ПЛАСТИЧЕСКИХ МАСС | 2009 |
|
RU2516399C9 |
| ШНЕКОВЫЕ ЭЛЕМЕНТЫ ДЛЯ МНОГОВАЛЬНЫХ ШНЕКОВЫХ МАШИН | 2014 |
|
RU2673517C2 |
| ШНЕКОВЫЕ ЭЛЕМЕНТЫ С УМЕНЬШЕННЫМ НАКЛОНОМ ГРЕБНЯ | 2009 |
|
RU2522624C9 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ШНЕКОВЫХ ЭЛЕМЕНТОВ | 2009 |
|
RU2516152C9 |
| ШНЕКОВЫЕ ЭЛЕМЕНТЫ СО СНИЖЕННОЙ ЭНЕРГОПОДАЧЕЙ ПРИ ПОВЫШЕНИИ ДАВЛЕНИЯ | 2009 |
|
RU2516552C9 |
| Двухшнековый экструдер | 1988 |
|
SU1581590A1 |
| ЭКСЦЕНТРИКОВО-ЦИКЛОИДАЛЬНОЕ ЗАЦЕПЛЕНИЕ ЗУБЧАТЫХ ПРОФИЛЕЙ С КРИВОЛИНЕЙНЫМИ ЗУБЬЯМИ | 2010 |
|
RU2416748C1 |
| ШНЕКОВЫЕ ЭЛЕМЕНТЫ ДЛЯ ЭКСТРУЗИИ ПЛАСТИЧЕСКИХ МАСС | 2009 |
|
RU2500533C2 |
Изобретение относится к устрой- ствам 1для транспортирования сыпучих | .и вязких материалов и может быть ис-i пользовано, например, в нефтегазовой промышленности при очистке емкостей i и амбаров. Цель изобретения - повы- j шение производительности и надежности работы. Устройство выполнено в,виде . i Ч шнекового механизма 1, соединенного 1с заборным приспособлением 2, Забор- ное приспособление состоит из корпуса 3 и размещенных в нем рабочих органов 4 и 5 в виде по меньшей мере двух взаимозацепляющихся винтов. Рабочая поверхность каждого винта выполнена в вире конической спирали t профиль которой в плоскости сечения, нормальной к оси вращения винтов, образует симметричные геометрические фигуры из сопряжения четырех дуг, рариусы двух из которых с общим центром на оси симметрии каждой фигуры определяются соотношением г + Г2 а Рэдиусь1 ДВУХ замыкающих фигуру противоположных дуг равны между собой и равны А« Рабочая поверхность вэаимозацепляющихся винтов 4 и 5, размещенных в части корпуса 3 из двух пересекающихся по образующим цилиндров, выполнена в. виде вала с винтовой нарезкой, 9 ил,| Й-А. фиг.г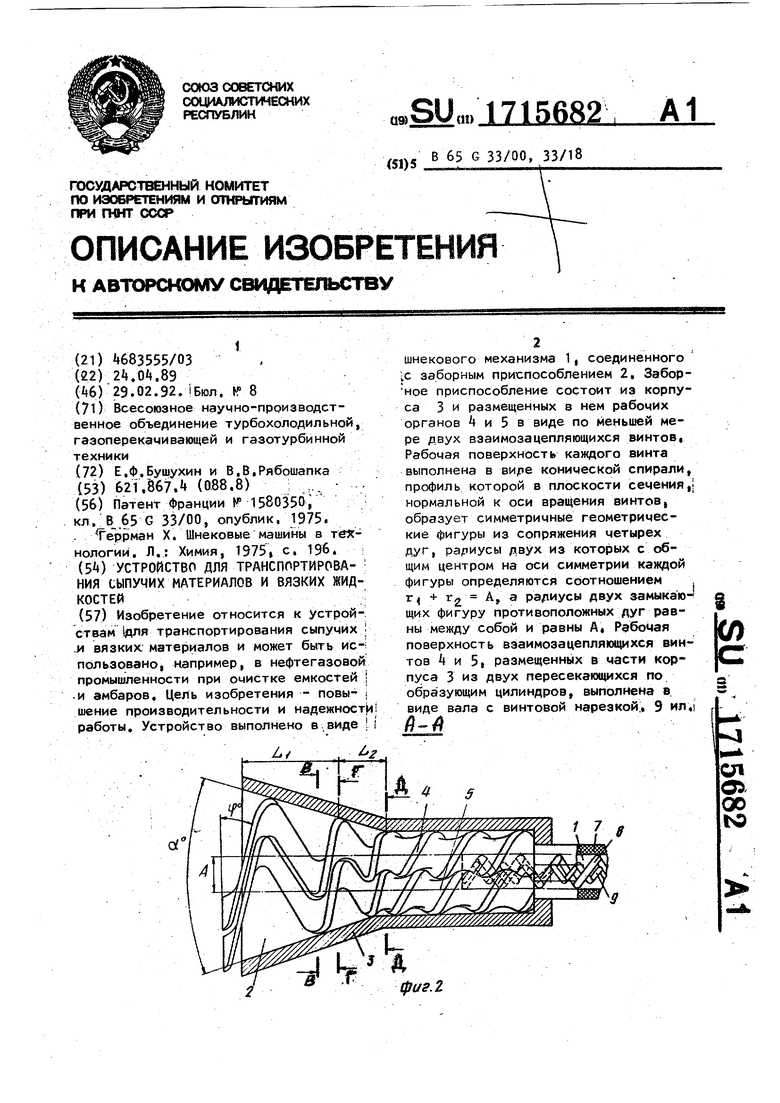
ляются залипание материала на стенках кожуха и гибком шнеке, наличие многочисленных шарниров, которые препятствуют перемещению материала, Наиболее близким к предлагаемому является спиральный винтовой транспортер, содержащий кожух с входным окном, заборное устройство и находящийся внутри кожуха грузонесущий
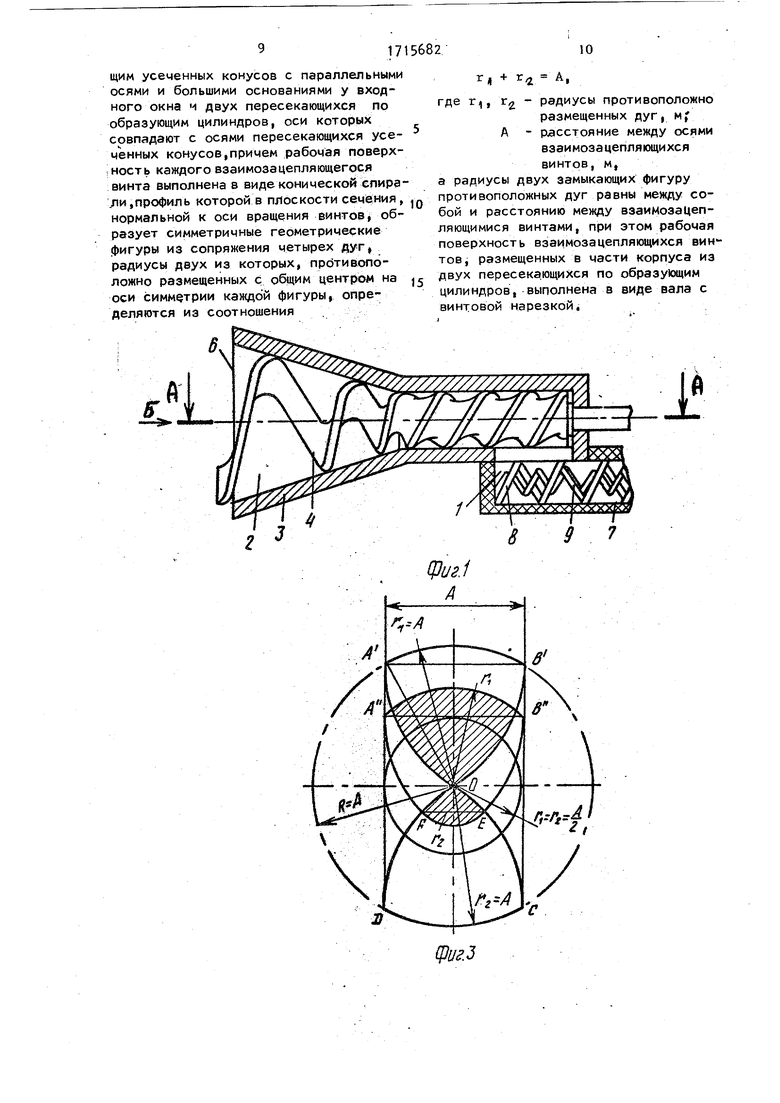
орган в виде винтовой гибкой спирали чвой нарезкой. . которая приводится во вращение со I На фиг,1 изображен общий вид устскоростью, зависящей от физико-ме-ройства; на фиг.2 - разрез А-А на
ханических свойств транспортируемого фиг,1; на фиг.3 - коническая спираль
материала,с возможностью получения симметричы
0
взаимозацепляющихся винтов, м, а радиусы двух замыкающих фигуру противоположных дуг равны между собой и, расстоянию между взаимозацепляющимисй винтами, при этом рабочая поверхность взаимозацепляющихся винтов, размещен-j- ных в части корпуса из двух и более пересекающихся по образующим цилиндров, выполнена в виде вала с винтоных геометрических профилей, поперечное сечение; на фиг,А - варианты заборной части винтового механизма, поперечное сечение; на фиг,5 - вид Б на фиг-,1, на фиг.6 - разрез В-В на фиг.2; на фиг.7 - разрез Г-Г на фиг.2; на фиг,8 - разрез Д.-Д на |фиг.2; на фиг. 9 - цилиндрическая часть винтового механизма, попереч- |ный разрез.
| Устройство содержит шнековый механизм 1, соединенный с заборным приспособлением 2, выполненным.в виде (корпуса 3 и размещенных в нем рабо- чих органов k и 5, выполненных в виде по меньшей мере двух взаимозацепляющихся винтов с возможностью вращения в одном направлении, Заборное приспособление 3 выполнено по меньшей мере из двух пересекающихся по образующим усеченных конусов с параллельными осями и большими основаниями у входного окна и по меньшей мере двух пересекающихся по образующим цилиндров, оси которых совпадают с осями пересекающихся усеченных конусов.
Угол раскрытия конуса заборной части об и угол подъема винтовой спирали Cf выбирают из условия физико- механических свойств материала, производительности, а также из условия необходимой механической проч ности. Их величина находится в прет делах
60°.
30°-с tf Ј 180°,
10° Ј
Ч
Рабочая поверхность каждого взаимр- эацепляющегося винта 4 и 5 выполнена в виде конической спирали, профиль которой в плоскости сечения, нормальной к оси вращения винтов, образует симметричные геометрические фигуры из сопряжения четырех дуг, радиусы двух из которых, противоположно размещенных, с общим центром на оси симмет- рии каждой фигуры, определяются из соотношения г, + г А, где г у,, г - радиусы противоположно размещенных дуг, MJ A - расстояние между осями взаимозацепляющихся винтов, м{ а радиусы двух замыкающих фигуру противоположных дуг равны между собой и расстоянию между взаимозацепляющими
винтами, при этом рабочая поверхность взаимозацепляющихся винтов $ и 5, размещённых в части корпуса 3 из двух пересекающихся по образу
0
5
0
5
0
5
0
5
щим цилиндров, выполнена в виде вала с винтовой нарезкой.
Шнековый механизм 1 содержит гибкий износостойкий резинокордовый рукав 7 и два рабочих органа - спирали 8 и 9 из пружинной проволокиi разме-; щенных одна в другой и заключенными в общий резиновый рукав 7 Витки внут-i ренней и наружной спирали имеют раз- ный угол подъема и направление на- ; вивки витков спирали. Спирали 8 и 9 вращаются в разные стороны.
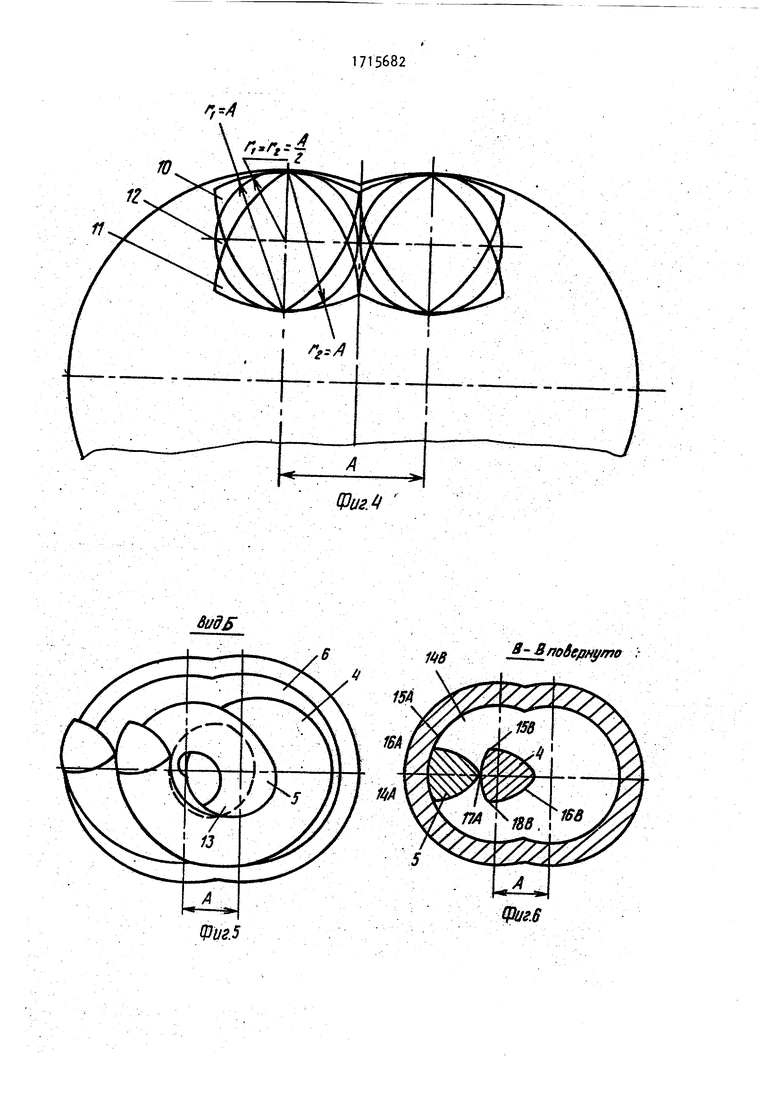
Множество получаемых симметричных геометрических фигур в поперечном сечении конической спирали винта при условии взаимной очистки винтов и обкатки профилей винтов показано в полосе А1 В1 CD круга с радиусом А ши-: риной, равной расстоянию между осями; винтов (фиг. 3).
Площадь сечения каждой из множества фигур имеет одну и ту же величину, несмотря на геометрию фигуры.
Геометрическое место точек центров тяжести всех фигур лежит на диаметре окружности с радиусом А и является осью симметрии каждой из множества фигур.
Ширина полосы А В CD равна межцентровому расстоянию А,
В полосе А1В1 CD .верхнее граничное положение сечения DOC описывается тремя радиусами,равными межцентровому расстоянию. Среднее положение сечения имеет форму круга с радиусом, равным половине межцентрового расстояния. Все промежуточные сечения описываются четырьмя дугами, например сечение , где дуги и Е описаны из точки 0 радиусами г и r2i . Сумма абсолютных величин двух радиу-: сов г,, и ГЈ равна межцентровому рас- стоянию А. Дуги ВИЕ и АИР,. описаны радиусом, равным межцентровому расстоянию. Дуги описываются из точки в , Остальные сечения описываются аналогично.
Таким образом при перемещении сечения вниз дуга А1 В1 сходится в р,у гу DC.
На фиг,изображено поперечное сечение конической заборной части . корпуса 3 для двух винтов в зацеплении при разной геометрической форме профилей: профили 10 и 11 описаны тремя радиусами, равными межцентровому расстоянию А, профиль 12 - окружность, описанная радиусом, равным половине межцентрового расстояния А.
На фиг.5 показана зона 13 в средней части шнеков 14 и 15 характеризующаяся тем, что это зона свободна от тела шнеков при вращении последних. При вращении винтов точка 17А (точка пересечения дуг 15А и 16А) по поверхности винтовой спирали k на дуге 14В спирали 5 до тех пор, пока точка пересечения 17А достигнет точки 18В (точка пересечения дуг 14В и 1бВ), После этого точка 18В начинает перемещаться по дуге 15А поверхности шнековой спирали 5. При совершении полного оборота при вращении винтов и 5 поверхности обеих винтовых спиралей будут очищены вместе с внутренней поверхностью корпуса 3.
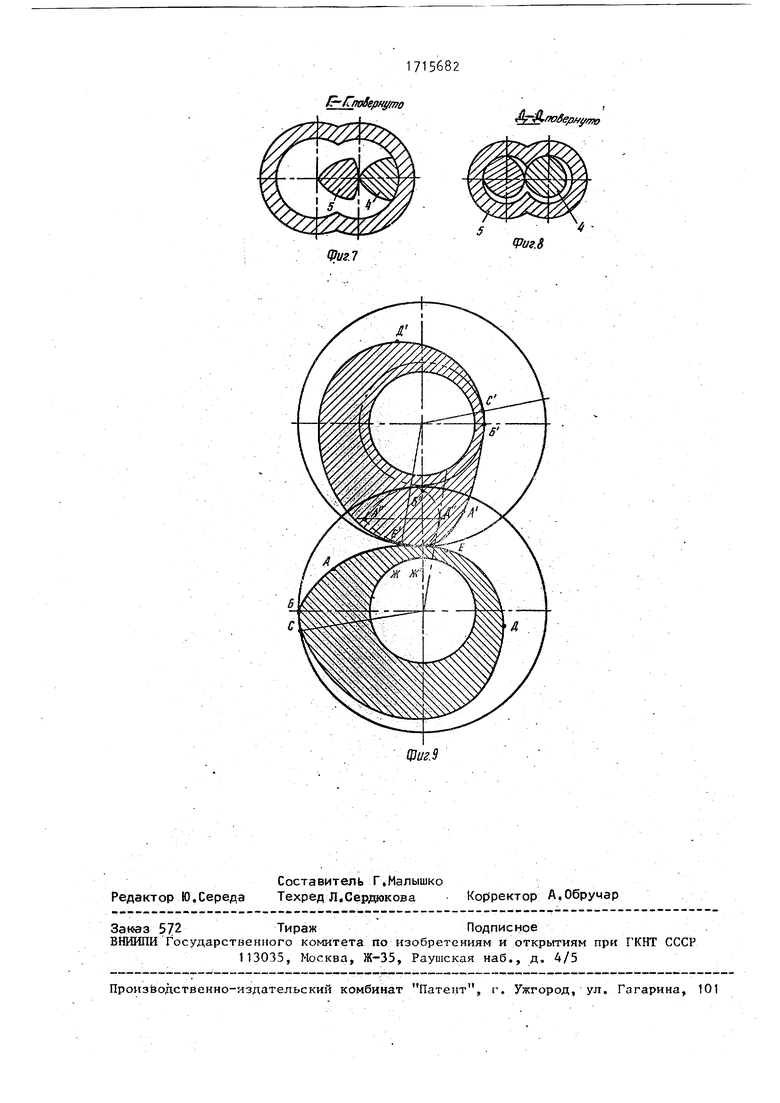
На фиг.7 изображено поперечное сечение конической части корпуса и винтовой спирали, где радиус внутренней поверхности конуса равен половине межцентрового расстояния,
Профиль поперечного сечения спиральной части винтов постоянный (фиг, 2) и ось вращения не проходит через тело винтов. Профиль поперечного сечения винтов плавно меняется, приближаясь к профилю цилиндрической части винта (фиг,8), Профиль винтов нарезки цилиндрической части винтов выполнен таким образом, что непрерывная линия, касания винтов при синхронном вращении их в одну сторону непрерывно перемещается по поверхности обоих винтов..Каждой точке поверхности одного винта соответствует одна точка смежного.
Процесс самоочистки происходит (фиг. 9) следующим образом.
При синхронном вращении двух винтов по часовой стрелке (фиг, 9) точки А и А одновременно попадают в- точку А, затем точки Б и Б в точку Б, затем дуги БС и Б С/ обкатываются в точке Б. После этого начинают взаимодействовать покатые стороны нарезки. Точки В и D .по- падают одновременно в точку D, точки Е и Ег попадают в точку Е затем обкатываются дуги ЕЖ и Е Ж и сечения возвращаются в исходное состояние. Цикл повторяется,
Указанны, выше точки без штрихов лежат на пжэйвфхности одного винта, с одним илтдо« шм1 - на поверхности вто10
15
0
5
30
35
40
45
50
5
рого, а с двойными штрихами -. на проекции линии касания шнеков. Вследствие встречного движения поверхностей соседних винтов в точке касания происходит взаимная очистка поверхностей от прилипших частиц.
Устройство работает следующим образом.
Транспортируемый материал, попадая в заборное устройство 2 в виде меха- ч низма захвата материала, движется по периметру внутренней поверхности конической части корпуса 3, где происходит его сжатие и дальнейшее продвижение к цилиндрической части корпуса. Часть материала проходит через зону 13 .в средней части винтов k и 5 (фиг. 5) и движется в обратном направлении, где имеет место смешивание и циркуляция транспортируемого материала.
Попадая в цилиндрическую часть корпуса 3, которая одновременно является и дозирующей, материал переме щается по направлению к выгрузке,
Плотный контакт винтов 4 и 5 препятствует образованию противотока , вдоль витков, а однонаправленное щениё исключает заклинивание винтов k и 5 и способствует самоочистке вин тов V и 5 при скольжении поверхности одного винта по поверхности другого.
Заборное приспособление захвата материала создает напорное питание шнекового механизма 1,
После выгрузки через заборное при{ способление 2 материал поступает в шнековый механизм 1, где дальнейшее транспортирование происходит посредством двух рабочих органов вращающихся спиралей 8 и 9
Формула изобретения
Устройство для транспортирования сыпучих материалов и вязких жидкостей, содержащее шнековый механизм, соединенный с заборным приспособлением, выполненным в виде корпуса и размещенных в нем рабочих органов, отличающееся тем, что, с целью повышения производительности и надежности работы, рабочие органы выполнены в виде по меньшей мере двух взаимозацепляющихся винтов, при этом корпус заборного приспособления выполнен в виде по меньшей мере двух пересекающихся по образующим усеченных конусов с параллельными осями и большими основаниями у входного окна ч двух пересекающихся по образующим цилиндров, оси которых совпадают с осями пересекающихся усеченных конусов,причем рабочая поверхность каждого взаимозацепляющегося винта выполнена в виде конической епира- ли,профиль которой в плоскости сечения, нормальной к оси вращения винтовj образует симметричные геометрические фигуры из сопряжения четырех дуг, радиусы двух из которых, противоположно размещенных с общим центром на оси симметрии каждой фигуры, определяются из соотношения
г, + г А,
r1f
гг А радиусы противоположно размещенных дуг, м расстояние между осями взаимозацепляющихся
а радиусы двух замыкающих фигуру противоположных дуг равны между собой и расстоянию между взаимозацепляющимися винтами, при этом рабочая поверхность взаимозацепляющихся винтов, размещенных в части корпуса из двух пересекающихся по образующим цилиндров, выполнена в виде вала с винтовой нарезкой.
8 97
фиг.З
К
п
Фиг.4
Bi/ffs
Фиг.5
J
9-8 ло6еону/по :Фиг.6
l ЈnoSeoni//no
ФигЛ
Дг-ДуЖЬЙЙ
рнуло
Щиг.9
| Устройство для суммирования @ последовательных чисел | 1988 |
|
SU1580350A1 |
| Геррман X | |||
| Шнековые машины в технологий | |||
| Л.: Химия, 1975 с | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
