Изобретение относится к машиностроению и может быть использовано в механизмах, предназначенных для преобразования параметров движения ведущего звена. :
Известна зубчатая передача с переменным передаточным отношением, содержащая параллельные ведущий и ведомый валы, на которых выполнены фланцы с радиальными лазами, в пазах фланцев перемещаются зубчатые сектора, зубья которых периодически вступают во взаимодействие с зубчатыми венцами, имеющими, кроме внутренних, внешние зубья. Механизм изменения вылета зубчатых секторов выполнен в виде совокупности кинематических пар винт-гайка, приводимых в движение вспомогательной зубчатой передачей черей
управляющий и замыкающий дифференциальные механизмы.
Недостатком известной передачи является сложность ее конструкции, особенно механизма изменения вылета зубчатых секторов, что обусловливает ее невысокую надежность.
Наиболее близкой к предлагаемой является передача, содержащая ведущий и ведо- мый валы, охватываемые зубчатым элементом.
Недостатком этой передачи является ее невысокая надежность.
Цель изобретения - повышение надежности зубчатого вариатора.
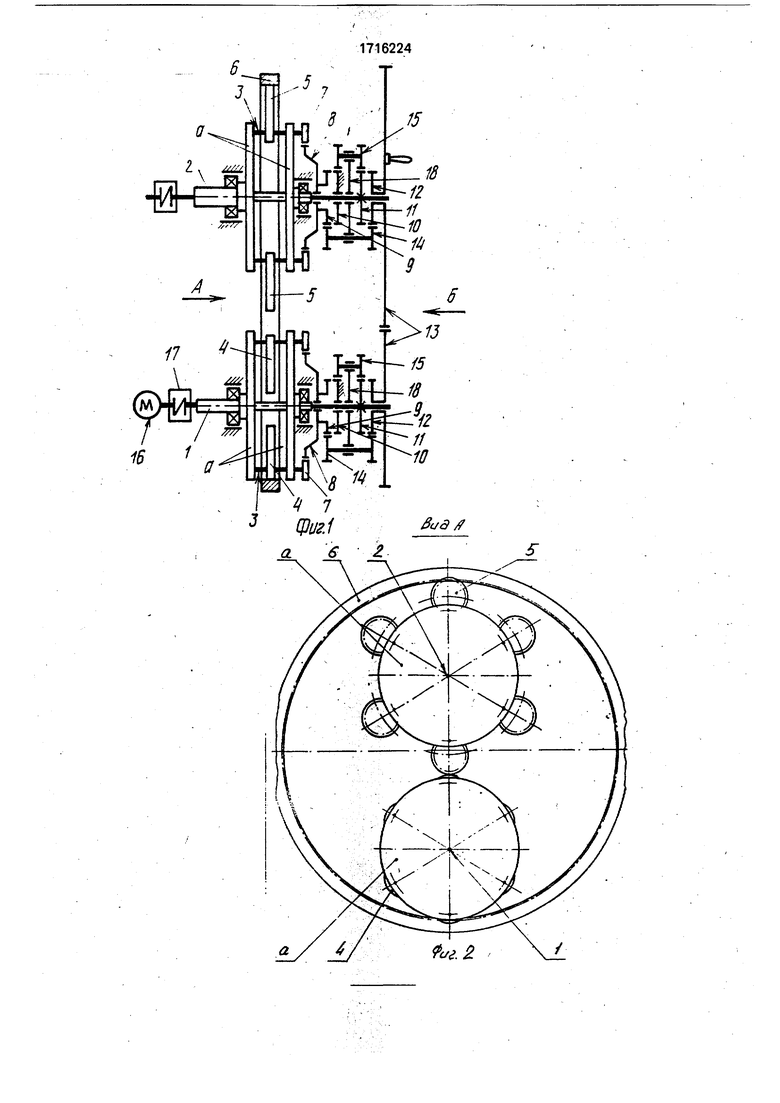
На фиг. 1 изображен зубчатый вариатор; на фиг. 2 - вид А на фиг. 1; на фиг. 3 О
ю ю
вид Б на фиг. 1; на фиг. 4 - принципиальная схема вариатора.
Зубчатый вариатор включает ведущий 1 и ведомый 2 валы, на которых выполнены диски а. На дисках а обоих валов смонтированы валики 3, на которых закреплены промежуточные зубчатые колеса 4 и 5 дисков ведущего и ведомого валов соответственно. Зубья зубчатых колес 4 и 5 периодически вступают в зацепление с зубьями зубчатого элемента б внутреннего зацепления (венца), охватывающего валы 1 и 2. Зубчатые колеса 4 и 5 установлены в дисках на валиках 3 с эксцентриситетом, причем если на ведущем валу вариатора у зубчатых колес 5 эксцентриситет направлен таким образом, что охватывающая-наружные поверхности колес 5 имеет максимальный диаметр, то у зубчатых колес 4 эксцентриситет направлен так, что охватывающая их наружные поверхности имеет минимальный диаметр. Зубчатый элемент 6 имеет такие размеры, что при вышеописанном положении зубчатых колес 4 и 5 их зубья находятся в нормальном зацеплении с зубьями элемента 6. На валиках 3 соосно установлены также зубчатые колеса 7, находящиеся в зацеплении с зубчатыми колесами 8, соосными с валами 1 и 2 и способными вращаться относительно этих валов. Соосно с каждым из валов 1 и 2 смонтированы имеющие одинаковые модуль и число зубьев зубчатые колеса 9, 10,
11и 12, причем зубчатые колеса 11 жестко закреплены на валах 1 и 2, а зубчатые колеса 9V 10 и 12 могут вращаться вокруг этих валов. Зубчатые колеса 9 жестко связаны с зубчатыми колесами 8, а зубчатые колеса
12- с находящимися в зацеплении друг с другом некруглыми зубчатыми колесами 13. Зубчатые колеса 10 жестко связаны с корпусом вариатора (не показан). В зацеплении с зубчатыми колесами 9 и 12 находится блок зубчатых колес 14, а в зацеплении с зубчатыми колесами 10и 11 -блокзубчатых колес 15. Таким образом, зубчатые колеса 9, 14 и 12 образуют управляющий дифференциал, а зубчатые колеса 10,15 и 11 -замыкающий дифференциал. Зубчатые колеса 4 и 5 дисков имеют упругое соединение зубчатого венца со ступицей. Ведущий вал вариатора приводится во вращение от электродвигателя 16 через муфту 17. Блоки 14 и 15 зубчатых колес смонтированы в водилах 18, способных вращаться на валах 1 и 2.
Вариатор работает следующим образом.
Вращение электродвигателя 16 через муфту 17 сообщается валу 1, вследствие чего вращение относительно геометрической оси вала 1 получают валики 3 вместе с установленными на них промежуточными зубчатыми колесами 4 диска этого вала. За счет зацепления зубьев зубчатых колес 4 и зубьев зубчатого элемента 6 вращение вала 1
сообщается элементу 6 внутреннего зацепления. Непрерывность зацепления зубьев различных зубчатых колес 4 с зубьями элемента б достигается выбором оптимальных размеров зубчатых колес 4 и диаметра окружности, на которой располагаются геометрические оси валиков 3. Поскольку в зацеплении с элементом б находятся также зубчатые колеса 5 диска ведомого вала, то вращение элемента 6 сообщается через зубчатые колеса 5, валики 3 и диски а валу 2. Вращение вала 2 происходит со скоростью, отличающейся от скорости вращения вала 1, поскольку радиус-вектор полюса зацепления зубчатых колес 4 с элементом 6 относительно геометрической оси вала 1 не равен радиус-вектору полюса зацепления зубчатых колес 5 с элементом 6 относительно геометрической оси вала 2. Для случая, изображенного на фиг. 4, радиус-вектор для
ведущего вала имеет минимальное значение, а для ведомого вала - максимальное.
Текущие значения радиус-векторов определяются следующим образом (см. фиг. 4).
Угол ф между радиус-векторами полюса зацепления, когда он расположен соответственно в точках Р и К, причем положение полюса зацепления в точке К соответствуют повороту зубчатых колес дисков ведомого вала вместе с этим валом на угол а , определяется по формуле (относительно геометрической оси элемента внутреннего зацепления):
ага,
где р -угол между радиус-векторами, проведенными от оси ведомого вала к полюсам зацепления зубчатых колес его диска с зубчатым элементом при углах поворота вали- ков, соответственно равных Она;
е - величина эксцентриситета зубчатых колес дисков;
а - заданный угол синхронного поворота валиков диска ведомого вала;
R - радиус начальной окружности зубча- того элемента внутреннего зацепления;
г - радиус начальной окружности зубчатых колес дисков.
Текущий радиус-вектор полюса зацеп- ления относительно геометрической оси ведомого вала определяется по формуле
K--IU
причем
kN R-sln R- :srlnQ:; ON - Ry + e cos a + r cos p ;
., . ,, lnat..
ON (R - r) (fy + e cos a + r cos f) :
где Ry- радиус окружности, на которой располагаются центры зубчатых колес дисков; ведущего и ведомого валов, а
у « arctn -jii ,.. е
7 a(K-ij-lK,+e-cosa- -r-cosW
я- е-sine
(R-O-slnarctg-TKZTTT
R e sin a
( (Ky + e cosaи-r )
При повороте промежуточных зубчатых колес дисков ведомого вала на угол а , а промежуточных зубчатых колес дисков вё дущего вала на угол fi происходит смещение зубчатого элемента внутреннего зацепления вдоль вертикальной оси симметрии вариатора на величину PPi, которая определяется из выражения
РР1 - Р2Рз CCi АР - APi АР;- АЕ - -EN--NP1.
Но
AE ecosa;
Р sin Я
Е N г cos у) г cosarcsin ;
/3 2-arcsinV( T-PPQ-PPI 4 e (R-r-P Pi +e) где /J-соответствующий углу a расчетный угол поворота валиков дисков ведущего вала, при котором сохраняется нормальное зацепление зубьев зубчатых колес дисков и зубчатого элемента при неизменном межосевом расстоянии между ведущим и ведомым валами.
Из того же треугольника GHCi имеем
здесь р - угол между радиусгвекторами, проведенными от оси ведущего вала к полюсам зацепления зубчатых колёс его диска с
зубчатым элементом при углах поворота валиков, соответственно равных 0 и /J .
Радиус полюса зацепления зубчатых колес диска ведущего вала с элементом внут- реннего зацепления относительно
геометрической оси ведущего вала определяется из выражения LY
Rieic2
Но
sin
LY R sin/3
R e.- slnff
R-r
OiY Ry-e cos/3 + r- cosp
30
и
toV
&
R e sin
(R-r)- (Ky-e -cosp + r -cos/)


| название | год | авторы | номер документа |
|---|---|---|---|
| Зубчатая передача | 1983 |
|
SU1357628A1 |
| Зубчатая передача | 1983 |
|
SU1359522A1 |
| ИНЕРЦИОННЫЙ АВТОМАТИЧЕСКИЙ ИМПУЛЬСИВНЫЙ ВАРИАТОР | 2002 |
|
RU2212575C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| СПОСОБ ОБРАБОТКИ НЕКРУГЛЫХ ПОВЕРХНОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2214889C1 |
| Зубчатая передача внешнего зацепления | 1988 |
|
SU1677411A1 |
| Вариатор скорости | 1978 |
|
SU892053A1 |
| Зубчатый редуктор | 1988 |
|
SU1588961A1 |
| Способ обработки резанием циклоидальных поверхностей | 1985 |
|
SU1337202A1 |
| Дифференциал свободного хода | 1990 |
|
SU1776582A1 |

Изобретение относится к машиностроению, а именно к зубчатым вариаторам. Цель - повышение надежности вариатора. Это достигается за счет упрощения конструкции. На дисках а, выполненных на ведущем 1 и ведомом 2 валах, установлены валики 3, на которых эксцентрично смонтированы зубчатые колеса 4 и 5, периодически вступающие в процессе вращения валов 1 и 2 в зацепление в зубчатым элементом 6 внутреннего зацепления. Поворот зубчатых колес 4 и 5 относительно геометрических осей валиков 3 осуществляется благодаря установке на валиках 3 зубчатых колес 7, находящихся в зацеплении с зубчатыми колесами 8, приводимыми во вращение через управляющие дифференциалы, закон движения водил 18 которых задается замыкающими дифференциалами. Ведущие зубчатые колеса управляющих дифференциалов приводятся в движение от находящихся в зацеплении друг с другом некруглых зубчатых колес 13, имеющих передаточное отношение, обеспечивающее нормальное функционирование вариатора. 4 ил. сл с
N Pi 2 R AP e + r;
sin2f;
Тогда,
PPi e + r-e -cosa-r cosarcsin JOS 2 . R .,.« - е (1 - cos а) + г (1 - cosarcsin - 2 R |
Угол ft поворота зубчатых колес дисков ведущего вала, соответствующий поворота зубчатых колес дисков ведомого вала, определяется из рассмотрения треугольника GHCi. Полупериметр этого треугольника равен
p- +R-f+H-pPiyr-.jiR+t pp1
тогда
sin Ј V(.P-UH)-(-tJl-i) H G Fi
При это|и
35
т.е.
rR.-e-sing
; arcig R rj. -cosp + f -cosp)
Окончательно имеем
evSinfl ft e (R-r) sinarag ,ц t ,цк е 8Т-,
v tK-T)(Ky-e COS/Я-Г COSp)
В процессе работы вариатора водила 18 получают вращение со скоростями, определяемыми скоростями вращения валов 1 и 2, благодаря замыкающим дифференциалам, составленным из зубчатых колес 10 и 11 и блока зубчатых колес 15. Осуществление кинематической связи между зубчатыми колесами 8 и зубчатыми колесами 13 через управляющие дифференциалы, составленные из зубчатых колес 9, 12 и блоков зубчатых колес 14, позволяет обеспечить в процессе работы вариатора в определенном режиме (с фиксированным передаточным отношением) неподвижность некруглых зубчатых колес 13.
Регулирование скорости вращения вала 2 осуществляется следующим образом.
Вращение одного из зацепляющихся друг с другом зубчатых колес 13 сообщает определенные, но не равные друг другу углы поворота зубчатым колесам 8, зацепляющимся в свою очередь с зубчатыми колесами 7, установленными на валиках 3. Таким образом, зубчатым колесам 4 дисков ведущего вала сообщается поворот на опреде- ленный угол, а зубчатым колесам 5 дисков ведомого вала на угол, соответствующий углу поворота зубчатых колес 4, причем зацепление зубчатых колес 4 и 5 с элементом 6 не нарушается. Соотношение углов пово- рота зубчатых колес 4 и 5 зависит от передаточного отношения составленной из некруглых зубчатых колес передачи, определяемого как
J - lg - ga. а1пагс18 (R-r)-(Ky-e + г cosp) к„а ыпр .,„.„.„.R-e-sin a
S arct9 (K-r).(H -t-e-coSja + r-cos
При непрерывном изменении передаточного отношения в определенном диапазоне возможна интерференция зубьев зубчатых колес 4 и 5 и зубчатого элемента 6. Исключить ее становится возможным благо- даря упругому соединению зубчатых венцов колес 4 и 5 со своими ступицами. Упругие перемещения венцов относительно ступиц должны обеспечиваться в пределах половины окружного шага их зубьев. Самоустанов- ка зубчатых колес 4 и 5 в процессе работы вариатора обеспечивается за счет заостре ния зубьев колес 4 и 5 и элемента 6.
Использование в качестве элементов передачи движения эксцентрично закреп- ленных на валиках цилиндрических зубчатых колес, а в качестве механизма для синхронного изменения расстояний от их центров до осей валов двух связывающих валики дифференциалов и кинематически связывающей управляющие цепи дифференциалов зубчатой передачи из двух некруглых колес позволяет уменьшить количество деталей вариатора и тем самым повысить надежность его функционирова- ния.
Ф о р м у л а и з о б р е т е н и я Зубчатый вариатор, содержащий параллельные ведущий и ведомый валы, закрепленные на них два диска с установленными равномерно по их окружностям параллельными осям валов валиками, закрепленные на валиках с возможностью синхронного изменения расстояний от геометрического центра до оси соответствующего вала зубчатые колеса, кинематически связывающий валы охватывающий колеса обоих дисков зубчатый элемент внутреннего зацепления и механизм для синхронного изменения расстояний от центров колес до осей валов, отличающийся тем, что, с целью повышения надежности, колеса закреплены на валиках эксцентрично с противоположной ориентацией эксцентриситета относительно вала у колес соответствующих дисков, механизм для синхронного изменения расстояний от центров колес до осей валов выполнен в виде двух кинематически связывающих валики соответствующих дисков дифференциалов с замыкающей и управляющей кинематической цепью каждый и кинематически связывающей управляющие цепи дифференциалов зубчатой передачи из двух некруглых колес, а передаточное отношение передачи из некруглых колес выбрано из соотношения
.„,„.„ .R в sin Л
. sin а . slnarct« (К - г) (И,- е cos /Г+ г cos Л si Р .|.„.. .R -e -sin я
narcte (К - г) (R, + a .-cos/) + г cos ip)
где i - передаточное отношение передачи из некруглых колес;
а - заданный угол синхронного поворота валиков диска ведомого вала;
/б - соответствующий углу а расчетный угол поворота валиков диска ведущего вала, при котором сохраняется нормальное зацепление зубьев зубчатых колес дисков и зубчатого элемента при неизменном межосевом расстоянии между ведущим и ведомым валами;
R - радиус начальной окружности зубчатого элемента внутреннего зацепления;
е - величина эксцентриситета зубчатых колес дисков;
г- радиус начальной окружности зубчатых колес дисков;
Ry- радиус окружности, на которой располагаются центры зубчатых колес дисков ведущего и ведомого валов;
р- угол между радиус-векторами, проведенными от оси ведущего вала к полюсам зацепления зубчатых колер его дисков с зубчатым элементом при углах поворота валиков, соответственно равных 0
уз-угол между радиус-векторами, проведенными от оси ведомого вала к полюсам зацепления зубчатых колес его дисков с зубчатым элементом при углах поворота валиков, соответственно равных Ома.
| Зубчатая передача | 1988 |
|
SU1518608A2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| СПОСОБ ПОЛУЧЕНИЯ ХЛОРАНГИДРИДА ФЕНОФОСФА- ЗИНОВОЙ КИСЛОТЫ | 0 |
|
SU191552A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
