Изобретение относится к области систем автоматического управления, в частности к системам управления положением инерционных объектов, и может быть использовано в системах управления наведением радиолокаторов, исполнительных устройств мобильных робототехнических комплексов, пусковых установок, орудий и башен самоходных артиллерийских установок.
Известны устройства по патентам РФ №№2071164, 2169938. Их недостатками являются низкое качество переходного процесса и, вследствие этого, недостаточное быстродействие.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является система управления инерционным объектом по патенту РФ №2537256, принятая за прототип. Она содержит последовательно соединенные задатчик, измеритель рассогласования, сумматор, последовательно соединенные усилитель мощности, исполнительный элемент, выход которого механически связан с объектом управления, датчик скорости, вход которого механически связан с исполнительным элементом, датчик положения, вход которого механически связан с объектом управления, а выход - со вторым входом измерителя рассогласования, нуль-орган, вход которого соединен с выходом измерителя рассогласования, пороговое устройство, элемент ИЛИ, первый и второй входы которого соединены соответственно с выходом нуль-органа и выходом порогового устройства, первый блок коммутации, первый вход которого соединен с выходом измерителя рассогласования, третий управляющий вход соединен с выходом элемента ИЛИ, интегратор, вход которого соединен с выходом первого блока коммутации, а выход соединен со вторым входом первого блока коммутации и третьим входом сумматора, второй блок коммутации, первый вход которого соединен с выходом сумматора, второй управляющий вход соединен с выходом нуль-органа, а выход соединен с входом усилителя мощности, нелинейное корректирующее звено с переменной крутизной, вход которого соединен с выходом датчика скорости, а выход соединен со вторым входом сумматора и входом порогового устройства.
Недостатком этого устройства является недостаточное быстродействие.
Изобретение направлено на повышение быстродействия.
Сущность технического решения заключается в следующем. Наведение инерционных объектов, например пусковых установок, осуществляется системами управления наведением, замкнутыми по положению объекта в инерциальной системе координат. При этом управление инерционным объектом осуществляется по сигналу рассогласования, вырабатываемому в результате сравнения требуемого (заданного) и текущего его угловых положений. В результате обработки сигнала рассогласования в системе управления наведением формируется сигнал управления инерционным объектом, который с помощью усилителя мощности усиливается до уровня, необходимого для управления исполнительным элементом, осуществляющим посредством механической связи воздействие на объект управления. Под воздействием исполнительного элемента объект управления перемещается в направлении уменьшения рассогласования до тех пор, пока рассогласование не уменьшится до нуля или до некоторого допустимого уровня, обусловленного требуемой точностью наведения.
В прототипе высокое быстродействие достигается за счет управления режимами работы интегратора, включенного в цепь ошибки системы управления, посредством первого блока коммутации и обнуления сигнала управления на входе усилителя мощности при уменьшении абсолютной величины рассогласования до допустимого значения с помощью второго блока коммутации.
При наличии рассогласования на выходе измерителя рассогласования, абсолютная величина которого превышает допустимый уровень, соответствующий требуемой точности наведения, нуль-орган снимает сигнал обнуления входного сигнала усилителя мощности с управляющего входа второго блока коммутации, что делает возможной отработку сигнала от измерителя рассогласования.
В процессе отработки рассогласования при больших скоростях исполнительного элемента пороговое устройство формирует сигнал обнуления интегратора, который поступает на элемент ИЛИ и далее на управляющий вход первого блока коммутации. Первый блок коммутации отключает интегратор от измерителя рассогласования и соединяет вход и выход интегратора, что приводит к его обнулению. Обнуление интегратора при больших скоростях исполнительного элемента препятствует накоплению сигнала на его выходе на протяжении всей отработки входного воздействия, что способствует получению переходного процесса без перерегулирования. Движение объекта управления к заданному положению при этом осуществляется за счет сигнала рассогласования.
При подходе к заданному положению скорость исполнительного элемента уменьшается, и при уменьшении сигнала, вырабатываемого датчиком скорости, ниже уровня срабатывания порогового устройства, сигнал обнуления интегратора снимается. Первый блок коммутации разъединяет вход и выход интегратора и соединяет вход интегратора с выходом измерителя рассогласования. На выходе интегратора начинает вырабатываться сигнал, пропорциональный интегралу сигнала рассогласования.
При уменьшении сигнала рассогласования в процессе движения объекта управления до уровня допустимой ошибки нуль-орган вырабатывает сигнал обнуления интегратора, который подается на управляющий вход первого блока коммутации через элемент ИЛИ и управляющий вход второго блока коммутации. При этом происходят обнуление интегратора и обнуление входного сигнала усилителя мощности, что приводит к остановке объекта управления.
Однако в случае действия на валу объекта управления большого момента неуравновешенности, направление которого совпадает с направлением отработки рассогласования, отработка рассогласования в этом устройстве может происходить с перерегулированием. При этом либо по сигналу от нуль-органа, либо по сигналу от порогового устройства может происходить обнуление интегратора, вследствие чего перерегулирование в направлении действия момента неуравновешенности будет увеличиваться, что приведет к увеличению продолжительности переходного процесса.
Повышение быстродействия системы управления наведением инерционного объекта при наведении в направлении, совпадающем с действием момента неуравновешенности, может быть достигнуто за счет введения в схему обнуления входного сигнала усилителя мощности схемы, выполняющей анализ совпадения знаков сигналов рассогласования и скорости исполнительного элемента. Наиболее просто анализ совпадения знаков двух сигналов можно выполнить с помощью блока умножения. Если знаки сигналов, подаваемых на входы блока умножения совпадают, то произведение этих сигналов больше нуля. В противном случае это произведение меньше нуля.
Указанный технический результат при осуществлении изобретения достигается тем, что в систему управления наведением инерционного объекта, содержащую последовательно соединенные задатчик, измеритель рассогласования, последовательно соединенные блок коммутации, усилитель мощности, исполнительный элемент, выход которого механически связан с объектом управления, датчик скорости, вход которого механически связан с исполнительным элементом, датчик положения, вход которого механически связан с объектом управления, а выход - со вторым входом измерителя рассогласования, первый нуль-орган, вход которого соединен с выходом измерителя рассогласования, первое пороговое устройство, элемент ИЛИ, введены блок умножения, первый вход которого соединен с выходом измерителя рассогласования, второй вход соединен с выходом датчика скорости, а выход соединен с входом первого порогового устройства, второй нуль-орган, вход которого соединен с выходом измерителя рассогласования, второе пороговое устройство, вход которого соединен с выходом датчика скорости, первый элемент И, первый вход которого соединен с выходом первого нуль-органа, а выход соединен с первым входом элемента ИЛИ, второй элемент И, первый вход которого соединен с выходом второго нуль-органа, а выход соединен с вторым входом элемента ИЛИ, третий элемент И, первый вход которого соединен с выходом второго порогового устройства, второй вход соединен с выходом первого порогового устройства, третий вход соединен с выходом элемента ИЛИ, а выход соединен с управляющим входом блока коммутации и с вторым входом первого элемента И, элемент НЕ, вход которого соединен с выходом третьего элемента И, а выход - со вторым входом второго элемента И, первый вход блока коммутации соединен с выходом измерителя рассогласования.
В заявленном устройстве повышение быстродействия обеспечивается включением блока умножения, второго нуль-органа, второго порогового устройства, первого, второго и третьего элементов И, элемента НЕ.
В процессе работы системы управления наведением инерционного объекта с помощью нуль органов, пороговых устройств и блока умножения производится анализ текущей абсолютной величины сигнала рассогласования, текущей абсолютной величины скорости исполнительного элемента, измеряемой датчиком скорости, а также сравнение знаков сигналов рассогласования и скорости исполнительного элемента. В том случае, если абсолютная величина рассогласования превышает допустимый уровень, обусловленный требуемой точностью наведения объекта управления, или абсолютная величина сигнала датчика скорости выше уровня срабатывания второго порогового устройства, или сигнал рассогласования и сигнал датчика скорости имеют противоположные знаки, что свидетельствует о движении объекта управления в направлении от заданного углового положения, на выходе третьего элемента И имеется сигнал логического нуля, в соответствии с которым блок коммутации пропускает сигнал от измерителя рассогласования на вход усилителя мощности. Усилитель мощности усиливает сигнал рассогласования по мощности до уровня, необходимого для управления исполнительным элементом. Исполнительный элемент создает движущий момент, воздействующий на объект управления для его перемещения в заданное угловое положение.
При подходе объекта управления к заданному угловому положению, определяемому по одновременному выполнению следующих условий:
- абсолютная величина текущего рассогласования меньше уровня срабатывания второго нуль-органа, выбираемого в 1,5-3 раза ниже уровня допустимой ошибки наведения;
- абсолютная величина сигнала датчика скорости меньше уровня срабатывания второго порогового устройства;
- произведение сигнала датчика скорости и сигнала рассогласования больше, либо равно нулю,
на выходах второго нуль-органа, первого и второго пороговых устройств формируются сигналы логических единиц. При этом на выходе первого нуль-органа также имеется сигнал логической единицы, так как его уровень срабатывания выбирается равным допустимой ошибке наведения, т.е. в 1,5-3 раза выше уровня срабатывания второго нуль-органа.
При появлении на выходе второго нуль-органа сигнала логической единицы и наличии на выходе третьего элемента И сигнала логического нуля на выходе второго элемента И формируется сигнал логической единицы. При этом на выходе элемента ИЛИ также формируется сигнал логической единицы, по которому при наличии сигналов логической единицы на выходах первого и второго пороговых устройств на выходе третьего элемента И устанавливается сигнал логической единицы.
При этом на выходах элемента НЕ и второго элемента И устанавливаются сигналы логического нуля, а на выходе первого элемента И устанавливается сигнал логической единицы. В результате на выходе элемента ИЛИ и выходе третьего элемента И сохраняются сигналы логической единицы.
При наличии сигнала логической единицы на выходе третьего элемента И блок коммутации обнуляет входной сигнал усилителя мощности, вызывая тем самым остановку исполнительного элемента и механически связанного с ним объекта управления.
После обнуления входного сигнала усилителя мощности объект управления в процессе остановки может переместиться на угол, превышающий порог срабатывания второго нуль-органа, установленный в 1,5-3 раза ниже уровня допустимой ошибки наведения. Однако, если после полной остановки объекта управления абсолютная величина сигнала рассогласования не превышает уровня допустимой ошибки наведения, на выходе первого нуль-органа сохранится сигнал логической единицы. При этом на выходе третьего элемента И также сохранится сигнал логической единицы, по которому блок коммутации обнуляет входной сигнал усилителя мощности.
В том случае, если объект управления подходит к заданному угловому положению с большой скоростью, при которой абсолютная величина сигнала датчика скорости превышает порог срабатывания второго порогового устройства, на выходе второго порогового устройства имеется сигнал логического нуля. При этом на выходе третьего элемента И сохраняется сигнал логического нуля, и система управления продолжает отработку имеющегося рассогласования, осуществляющуюся в этом случае с перерегулированием, до выполнения всех перечисленных выше условий, при которых на выходе третьего элемента И формируется сигнал логической единицы.
Также в случае несовпадения знаков сигнала рассогласования и сигнала датчика скорости, имеющего место, например, при перерегулировании, произведение этих сигналов на выходе блока умножения имеет отрицательный знак. При этом на выходе первого порогового устройства устанавливается сигнал логического нуля. Соответственно на выходе третьего элемента И также имеется сигнал логического нуля, и система управления продолжает отработку имеющегося рассогласования до выполнения всех перечисленных выше условий, при которых на выходе третьего элемента И формируется сигнал логической единицы.
При этом сокращение продолжительности отработки заданных углов наведения в заявляемом устройстве достигается за счет исключения обнуления сигнала на входе усилителя мощности при проходе объектом управления через согласованное положение с высокой скоростью либо при наличии движения объекта управления в сторону удаления от согласованного положения.
Таким образом, совокупность перечисленных элементов, соединенных описанным выше способом, позволяет повысить быстродействие.
На фиг. изображена схема заявляемого устройства.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше технического результата, заключаются в следующем.
Система управления наведением инерционного объекта содержит задатчик 1, измеритель рассогласования 2, блок умножения 3, первый нуль-орган 4, второй нуль-орган 5, первое пороговое устройство 6, первый элемент И 7, второй элемент И 8, блок коммутации 9, элемент ИЛИ 10, второе пороговое устройство 11, третий элемент И 12, усилитель мощности 13, элемент НЕ 14, датчик скорости 15, датчик положения 16, исполнительный элемент 17, механически связанный с объектом управления 18.
Первый и второй входы измерителя рассогласования 2 соединены соответственно с выходом задатчика 1 и выходом датчика положения 16. Первый вход блока умножения 3, входы первого и второго нуль-органов 4 и 5, первый вход блока коммутации 9 соединены с выходом измерителя рассогласования 2. Второй вход блока умножения 3 и вход второго порогового устройства 11 соединены с выходом датчика скорости 15. Вход первого порогового устройства 6 соединен с выходом блока умножения 3. Первый и второй входы первого элемента И 7 соединены соответственно с выходами первого нуль-органа 4 и третьего элемента И 12. Первый и второй входы второго элемента И 8 соединены соответственно с выходами второго нуль-органа 5 и элемента НЕ 14. Первый и второй входы элемента ИЛИ 10 соединены соответственно с выходами первого и второго элементов И 7 и 8. Первый вход третьего элемента И 12 соединен с выходом второго порогового устройства 11. Второй его вход соединен с выходом первого порогового устройства 6, а третий вход - с выходом элемента ИЛИ 10. Вход элемента НЕ 14 и управляющий вход блока коммутации 9 соединены с выходом третьего элемента И 12. Вход усилителя мощности 13 соединен с выходом блока коммутации 9. Вход исполнительного элемента 17 соединен с выходом усилителя мощности 13. Вход датчика скорости 15 механически связан с исполнительным элементом 17. Вход датчика положения 16 механически связан с объектом управления 18.
Система управления наведением инерционного объекта работает следующим образом.
Задатчик 1 вырабатывает заданный угол наведения объекта управления 18 в виде ступенчатого входного воздействия. Измеритель рассогласования 2 по сигналу входного воздействия и сигналу датчика положения 16 вырабатывает сигнал рассогласования, который поступает на входы блока умножения 3, первого нуль-органа 4, второго нуль-органа 5 и блока коммутации 9. При рассогласовании, превышающем уровень допустимой ошибки наведения, на выходах первого и второго нуль-органов 4 и 5 сформированы сигналы логического нуля. При этом на выходах первого и второго элементов И 7 и 8 также сформированы сигналы логического нуля, соответственно на выходах элемента ИЛИ 10 и третьего элемента И 12 также сформированы сигналы логического нуля. Сигнал логического нуля с выхода третьего элемента И 12 поступает на управляющий вход блока коммутации 9. При этом блок коммутации 9 пропускает сигнал рассогласования от измерителя рассогласования 2 на вход усилителя мощности 13. Усилитель мощности 13 усиливает сигнал рассогласования по мощности до уровня, необходимого для управления исполнительным элементом 17. Исполнительный элемент 17 создает движущий момент, воздействующий на объект управления 18 для его перемещения в заданное угловое положение.
По мере приближения объекта управления 18 к заданному угловому положению абсолютная величина сигнала рассогласования на выходе измерителя рассогласования 2, абсолютная величина скорости исполнительного элемента 17 и соответственно абсолютная величина сигнала на выходе датчика скорости 15 уменьшаются.
При уменьшении абсолютной величины сигнала на выходе датчика скорости 15 до порога срабатывания второго порогового устройства 11 на выходе этого устройства формируется сигнал логической единицы.
При уменьшении абсолютной величины сигнала рассогласования на выходе измерителя рассогласования 2 до порога срабатывания первого нуль-органа 4, выбираемого на уровне допустимой ошибки наведения, на его выходе формируется сигнал логической единицы, который поступает на первый вход первого элемента И 7. Поскольку на второй вход первого элемента И 7 с выхода третьего элемента И 12 поступает сигнал логического нуля, на его выходе также имеется сигнал логического нуля.
При уменьшении абсолютной величины сигнала рассогласования на выходе измерителя рассогласования 2 до порога срабатывания второго нуль-органа 5, выбираемого в 1,5-3 раза ниже уровня допустимой ошибки наведения, на его выходе формируется сигнал логической единицы, который поступает на первый вход второго элемента И 8. Поскольку на второй вход второго элемента И 8 поступает также сигнал логической единицы с выхода элемента НЕ 14, на его выходе устанавливается сигнал логической единицы. При этом на выходе элемента ИЛИ 10 также устанавливается сигнал логической единицы.
Если знаки сигнала рассогласования на выходе измерителя рассогласования 2 и сигнала на выходе датчика скорости 15 совпадают, сигнал на выходе блока умножения 3 положителен, соответственно на выходе первого порогового устройства 6 имеется сигнал логической единицы.
При наличии на выходах первого порогового устройства 6, элемента ИЛИ 10 и второго порогового устройства 11 сигналов логических единиц на выходе третьего элемента И 12 устанавливается сигнал логической единицы.
При этом на выходах элемента НЕ 14 и второго элемента И 8 устанавливаются сигналы логического нуля, а на выходе первого элемента И 7 устанавливается сигнал логической единицы. В результате на выходе элемента ИЛИ 10 и выходе третьего элемента И 12 сохраняются сигналы логической единицы.
При наличии на выходе третьего элемента И 12 сигнала логической единицы блок коммутации 9 обнуляет входной сигнал усилителя мощности 13, вызывая остановку исполнительного элемента 17 и остановку вместе с ним объекта управления 18.
В предлагаемом изобретении при практической реализации могут быть использованы известные схемные реализации элемента И, элемента ИЛИ, элемента НЕ, нуль-органа, порогового устройства, блока умножения, в том числе устройства, реализованные на базе программируемых ЭВМ и контроллеров.
В качестве исполнительного элемента могут быть использованы электродвигатели постоянного и переменного тока, гидромоторы, поворотные гидравлические секторы, гидроцилиндры, комбинированные подъемно-уравновешивающие механизмы.
В качестве усилителя мощности могут быть использованы электромашинные, полупроводниковые усилители и преобразователи, генераторы, регулируемые насосы.
В качестве датчика положения могут быть использованы индуктивные, индукционные, емкостные, потенциометрические, цифровые датчики, а также гироскопические системы.
В качестве блока коммутации могут быть использованы реле, аналоговые ключи и коммутаторы, устройства, реализованные на базе программируемых ЭВМ и контроллеров, а также другие известные реализации.
В качестве датчика скорости могут быть использованы тахогенераторы постоянного и переменного тока, импульсные датчики скорости, гиротахометры, резольверы с соответствующей схемой обработки их выходного сигнала.
В качестве задатчика могут быть использованы электронные и механические (шкальные) задатчики, устройства ввода-вывода информации, счетно-решающие и транслирующие устройства из состава системы управления более высокого иерархического уровня, а также другие известные схемные реализации.
В качестве измерителя рассогласования могут быть использованы счетно-решающие приборы, ЭВМ, контроллеры, блоки обработки и управления, содержащие ЭВМ, а также другие известные схемные реализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| Следящая система наведения | 2023 |
|
RU2815295C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| Привод наведения | 2024 |
|
RU2835457C1 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Система наведения | 2023 |
|
RU2819712C1 |
| Привод наведения | 2023 |
|
RU2817037C1 |
| Система наведения | 2023 |
|
RU2805507C1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |

Изобретение относится к области систем автоматического управления, в частности к системам управления положением инерционных объектов, и может быть использовано в системах управления наведением радиолокаторов, исполнительных устройств мобильных робототехнических комплексов, пусковых установок, орудий и башен самоходных артиллерийских установок, предназначенных для наведения инерционного объекта в требуемое угловое положение. Сущность заявленного решения заключается в том, что в систему управления наведением инерционного объекта, содержащую последовательно соединенные задатчик, измеритель рассогласования, последовательно соединенные блок коммутации, усилитель мощности, исполнительный элемент, выход которого механически связан с объектом управления, датчик скорости, вход которого механически связан с исполнительным элементом, датчик положения, вход которого механически связан с объектом управления, а выход - со вторым входом измерителя рассогласования, первый нуль-орган, вход которого соединен с выходом измерителя рассогласования, первое пороговое устройство, элемент ИЛИ, введены блок умножения, первый вход которого соединен с выходом измерителя рассогласования, второй вход соединен с выходом датчика скорости, а выход соединен с входом первого порогового устройства, второй нуль-орган, вход которого соединен с выходом измерителя рассогласования, второе пороговое устройство, вход которого соединен с выходом датчика скорости, первый элемент И, первый вход которого соединен с выходом первого нуль-органа, а выход соединен с первым входом элемента ИЛИ, второй элемент И, первый вход которого соединен с выходом второго нуль-органа, а выход соединен с вторым входом элемента ИЛИ, третий элемент И, первый вход которого соединен с выходом второго порогового устройства, второй вход соединен с выходом первого порогового устройства, третий вход соединен с выходом элемента ИЛИ, а выход соединен с управляющим входом блока коммутации и с вторым входом первого элемента И, элемент НЕ, вход которого соединен с выходом третьего элемента И, а выход - со вторым входом второго элемента И, первый вход блока коммутации соединен с выходом измерителя рассогласования. Техническим результатом при реализации заявленного изобретение является повышение быстродействия. 1 ил.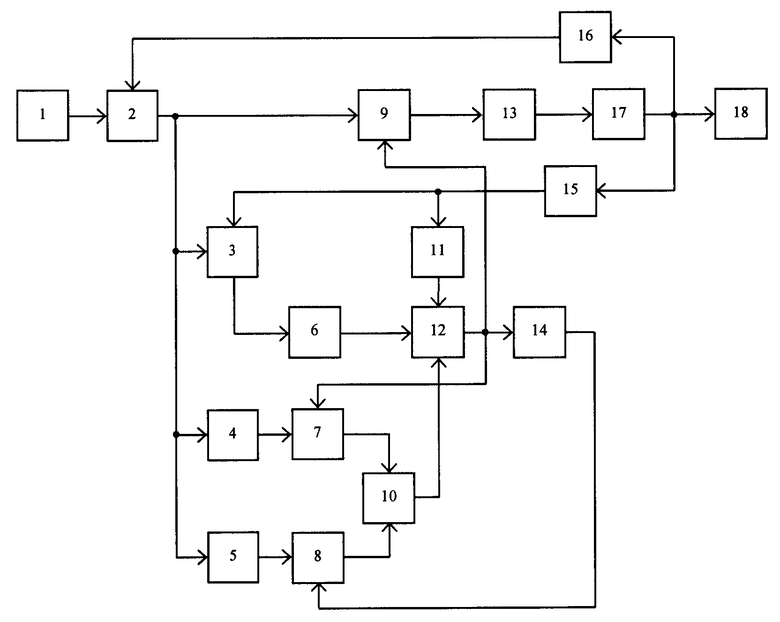
Система управления наведением инерционного объекта, содержащая последовательно соединенные задатчик, измеритель рассогласования, последовательно соединенные блок коммутации, усилитель мощности, исполнительный элемент, выход которого механически связан с объектом управления, датчик скорости, вход которого механически связан с исполнительным элементом, датчик положения, вход которого механически связан с объектом управления, а выход - со вторым входом измерителя рассогласования, первый нуль-орган, вход которого соединен с выходом измерителя рассогласования, первое пороговое устройство, элемент ИЛИ, отличающаяся тем, что в нее введены блок умножения, первый вход которого соединен с выходом измерителя рассогласования, второй вход соединен с выходом датчика скорости, а выход соединен с входом первого порогового устройства, второй нуль-орган, вход которого соединен с выходом измерителя рассогласования, второе пороговое устройство, вход которого соединен с выходом датчика скорости, первый элемент И, первый вход которого соединен с выходом первого нуль-органа, а выход соединен с первым входом элемента ИЛИ, второй элемент И, первый вход которого соединен с выходом второго нуль-органа, а выход соединен с вторым входом элемента ИЛИ, третий элемент И, первый вход которого соединен с выходом второго порогового устройства, второй вход соединен с выходом первого порогового устройства, третий вход соединен с выходом элемента ИЛИ, а выход соединен с управляющим входом блока коммутации и с вторым входом первого элемента И, элемент НЕ, вход которого соединен с выходом третьего элемента И, а выход - со вторым входом второго элемента И, первый вход блока коммутации соединен с выходом измерителя рассогласования.
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| RU 31005 U1, 10.07.2003 | |||
| US 5089758 A, 18.02.1992. | |||

