Изобретение относнтс.я к обллстн робототехники и может быть использо-- вано при создар ин копир ющих манипуляторов .
Целью изобретения является новы- ление точности устройс1 ва путем обеспечения более точного измерения усилий, возникэлощих на исполнительном органе при )зяаимодействии с внешним объектом.
На чертеже представленй функциональная схема устройства.
Устройство содержит задаю1дий орган 1, первый привод 2, первый датчик 3 момента, первьда датчик 4 положения, первый сумматор 5, первый коммутатор 6, второй cyt-r:-iaTop 7, первый 3 н второй 9 усилители третий сумматор 0, второй коммутатор П, второй привод 12, датчик 13 скорости, испол яительньй механизм 14, :я сп о л :И5 тельный орган 15, второй датчик 16 момента, датчик 17 усилия 5 второй датчик 18 положения и пороговый эле1 4ент 19, Устройство работает следующим образом .
При работе манипулятора в свободной зоне сигнал на выходе датчика I7 усилия исполнительного органа отсутствует. Первые входы первого 6 и второго 1I KONMyTaTopoB соединены с выходами. Задающая сторона замрснута по моменту, а исполнительная - по скорости и положению. Сигнал с j aT4H- ка 18 положения исполнительной части через первый сумматор 5 , первый усилитель 8, первый коммутатор 6, сумматор 7 поступает на привод 12. Сигналом задания для исполнительной части является сигнал с датчика 4 положения задшошей части, а сигналом задания для задающей части - сигнал с датчика 16 момента. В результате оператор управляет положением жшолни- тельного органа 15, усилия, возникающие в исполннтетгьном приводе
При соприкосновении исполнительного органа 15 с внешним объектом, например,, при выполнении сборочкьис, установочных операдий на выходе датчика 7 усилия появляется сигнал, которьгй при превьапения порога сраЗа- гьшания порогового элемента 9 переключает коммутаторы 6 и II. Поро- овый элемент 19 не проггускает сигналы с датчика 17 усилия U,,, являющиеся помехой,, и тем самым предотвращает ложное срабатывание
хог- мутаторов . Вторые входы первого 6 и Еторог о 11 та торов соед1 5няют СИ с выходами. Задающая сторона по- ;тр-сжнему замкнута по моменту, а ис- пп.ггнительная - гю моменту и по ско- . Сигнал с датчика 1 7 усилия через .второй коммутатор 1 1 ,. сумматор 10, второй усилитель 9, коммутатор 6, сукгматор 7 поступает на привод 12 исполнительной стороны . Сигналом задания задающей стороны является сигнал с патчика 17 усилия,, а сигналом зада- jiriH исполнительной стороны - сигнал с задатчика 3 момента, Оператор при этом ощук: ;ает усилие, возникаюЕ(ее в датчике 1 7 усилия исполн/лтельного органа 15, и непосредственко управляет велкчи::1ой зтого усилия.
и 3 о б D
Т е Н И Я
0
Устройство дпя /правления копирующим манипулятором 5 содержаш.ее первый привод,, кинематически связанный с первым датчиком момента, который кинематически связан с первым датчиком положения, соединенного выходом последовательно подключенные ncpsbn i сумматор . первый усилитель . первый коммутатор и второй сумматор с входом второго привода, кинематически связанного с датчиком скорости, по пс-Хдклшченным выходом к второму входу второго о мнатора, и с исполнитель- libft-t механизмом, хоторый кинематически соед1П1ен с исполнительныь) органом, с вторым датчико1-.{ момента и вторьгм ,а,а гчикок по.гожепия , подключенным выходом к второму входу первого сумматора, третий сумматор, первь1й вход котс;рого соединен с выходом; первого .-датчика момента, а выход - с входом /тергюго привода непосредственно и чйрея второй усуиштель - с вторым :эхо,:юм ггервого коммутатора,, о т л и- а ю ш е е с я тем,, что, с целью повыше};:ия точнос ги управления, оно с:одержи:т Последовательно соединенные :и:- гкатически связанпьш с исполнитель- 1-тым органом датчик усилия, пороговый j lGMeHT и второй коммутатор, второй
ВХО,: которого ПОДКЛЮЧЕН К ВЫХОДУ ВТОРОГО датчика момента, третий вход - к выходу датчика усилия, а - к гггорому входу третьего сумйатора, а Бьгксд порогового элементя соединен с третьтч входом первого коммутатора .
L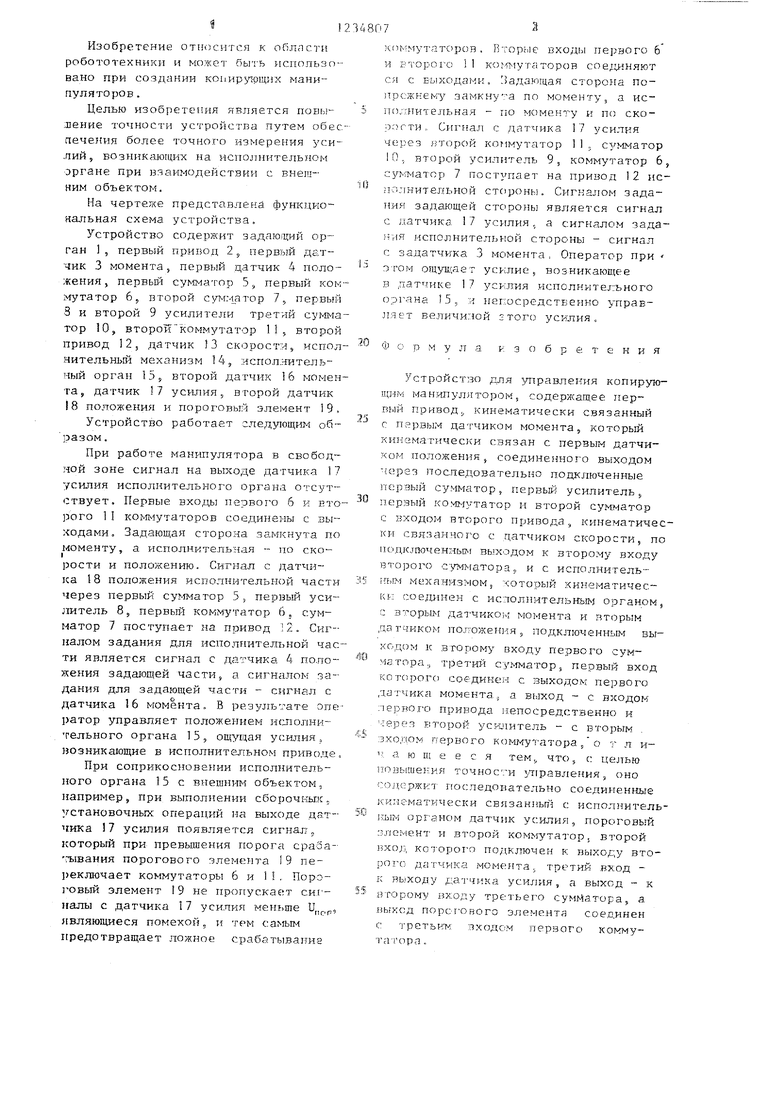
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления копирующим манипулятором | 1985 |
|
SU1262447A1 |
| Устройство для управления манипулятором | 1990 |
|
SU1717338A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1321582A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1290247A1 |
| Система управления копирующим манипулятором | 1977 |
|
SU614939A1 |
| Устройство для управления дистанционным манипулятором | 1989 |
|
SU1834795A3 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| Устройство для управления сборочным манипулятором | 1987 |
|
SU1495117A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1101786A1 |
| Устройство для управления электромеханическим копирующим манипулятором | 1980 |
|
SU928297A1 |

Изобретение относится к области робототехники и может быть использовано при создании копирующих манипуляторов. В изобретении за счет введенных датчика усилия, исполнительного органа, порогового элемента и второго коммутатора обеспечивается более точное измерение усилий, возникающих на исполнительном органе при взаимодействии с внешним объектом, что повышает точность устройства для управления коп 1рующим манипулятором. 1 ил. to оо 00
| Привод подачи шлифовальной бабки | 1977 |
|
SU629051A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для управления сборочным манипулятором | 1980 |
|
SU930228A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
