Изобретение относится к электротехнике и может быть использовано для дистанционной передачи угловых перемещений в следящих системах двустороннего действия с вентильными электродвигателями и сило- моментным очувствлением при необходимости масштабирования усилий.
Цель изобретения - повышение точности передачи угла поворота и расширение функциональных возможностей путем увеличения диапазона изменения отношения
моментов исполнительной и задающей синхронных машин.
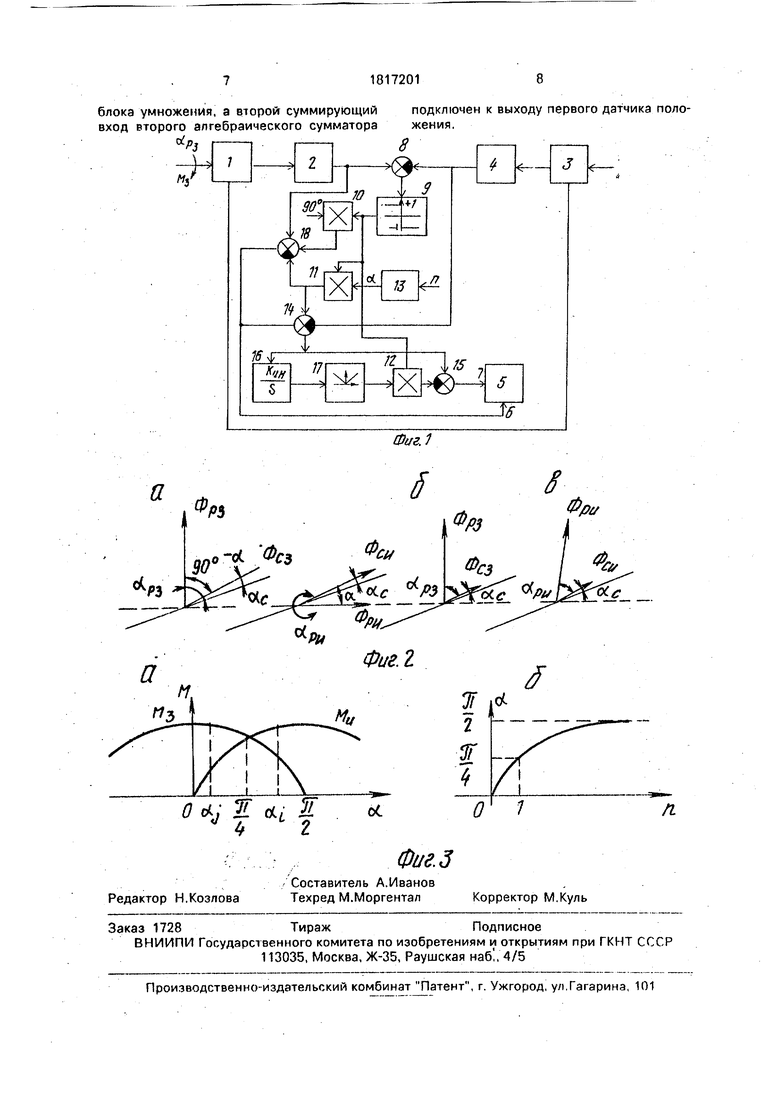
На фиг.1 изображена структурная схема устройства для дистанционной передачи угла; на фиг.2 - векторные диаграммы магнитных полей; на фиг.З - моментные характеристики устройства.
Устройство для дистанционной передачи угла с масштабированием усилий содержит укрепленную на задающем валу синхронную машину 1с первым датчиком 2 положения, исполнительную синхронную
00
ч
W
о
машину 3 со вторым датчиком 4 положения, полупроводниковый коммутатор 5 с коммутирующим б и управляющим 7 величиной тока входами, к выходам которого параллельно подключены ебмотки статоров обеих синхронных машин 1, 3, а выходы датчиков 2, 4 положения подключены ко входам первого двухвходового сравнивающего элемента 8, выход которого соединен со входом реле 9. Выход последнего связан с первыми входами трех блоков умножения 10-12, на второй вход первого блока умножения 10 подан сигнал, эквивалентный углу 90°. На второй вход второго блока 11 умножения подан сигнал с выхода нелинейного преобразователя 13 коэффициента масштабирования. Выход второго блока умножения 11 соединен с первым суммирующим входом первого трехвходового алгебраического сумматора 14, вычитающий вход которого соединен с выходом второго датчика 4 положения, а выход подключен к первому входу второго двухвходового сравнивающего элемента 15 и через последовательно соединенные интегратор 16 и блок 17 взятия модуля ко второму входу третьего блока умножения 12. Выход блока 12 соединен со вторым входом второго двухвходового сравнивающего элемента 15, выход которого подключен к управляющему величиной тока входу 7 полупроводникового коммутатора 5.
Выход первого блока 10 умножения подключен к первому суммирующему входу второго алгебраического сумматора 18, выход которого подключен ко второму суммирующему входу первого алгебраического сумматора 14 и к коммутирующему входу 6 полупровдникового коммутатора 5. Нелинейный преобразователь 13 выполнен в виде arctg-ного преобразователя, а второй вход алгебраический сумматор 18 снабжен вычитающим входом, подключенным к выходу второго блока умножения 11. Второй суммирующий вход второго алгебраического сумматора 18 подключен к выходу первого датчика 2 положения.
На фиг.1, 2, 3 приняты следующие обозначения:
«рз, сери - углы поворота исполнительного и задающего валов;
Ос угол поворота магнитных полей статоров;
о. - угол между магнитными полями ротора и статора исполнительного двигателя (синхронной машины);
Моп, Мн - нагрузочные моменты на задающем и исполнительном валах;
М3, Мп - моменты, развиваемые двигателями оператора и нагрузки:
и
10
15
20
25
30
35
40
Фрз, , Фсэ. Феи - магнитные потоки роторов и статоров синхронных машин оператора и нагрузки;
СМЗ, СМИ - синхронные машины на задающем и исполнительном валах соответственно;
ДПРЗ, ДПРИ - датчики положения роторов на задающем и исполнительном валах соответственно.
Устройство работает следующим образом. Угловая ориентация магнитных гтолей статоров обоих двигателей будет одинаковой, если считать оси роторов расположенными вдоль одной прямой при совпадении начал отсчета датчиков положения 2 и 3. За счет взаимодействия реле 9 и первых двух блоков умножения 10, 11 во втором алгебраическом сумматоре 18 к показаниям датчика 2 положения будет прибавлен сигнал ±(90° - «) знак которого определяется сигналом с выхода реле 9 таким образом, чтобы магнитные поля статоров были отклонены на 90° --« от магнитного поля ротора задающего двигателя Фр3 в сторону ФрИ (фиг.2а). Амплитуды статорных полей пропорциональны (в силу параллельного включения обмоток синхронных машин 1 и 3) и определяются рассогласованием fan., которое отсчитывается от положения Оо а % арз ±90°. (1), где знак + определяется сигналом с выхода реле 9, поступающим на блоки умножения 10 и 11, т.е. направлением нагрузочного момента Мн, в зависимости от которого 7р3 будет больше или меньше «рн .
При отключенном интеграторе 16 моменты двигателей выражаются следующим образом:
Ми Ки («о - «ри) sin a(1)
М3 К3(«о-ари) costt(2) где Ки и Кз - коэффициенты, определяемые конструкцией синхронных машин и при одинаковых двигателях Ки К3. Очевидно, что в системе данной структуры
п
JVU
Me,
- tg a
(3)
т.е. и принимает значения от 0 до оо и функциональный преобразователь с учетом (2) и (3) должен выполнять следующее преобразование
Ки (% arctgn -TfКз
(4)
Рассогласование Ьп - Оо - «ри с выхода первого алгебраического сумматора 14 поступает на вход интегратора 16 и сравнивающего элемента 15. При появлении рассогласования возникают вращающие моменты в соответствии с уравнениями (2) и начинает увеличиваться модуль интеграла рассогласования на выходе блока 17 При
увеличении угла между полями Фри и Феи больше а, что соответствует возрастанию Ми, сигнал модуля интегратора на выходе блока 12 умножения будет иметь тот же знак, что и рассогласование bfi в силу действия реле 9. Это приведет к увеличению сигнала на выходе сравнивающего элемента 15, а следовательно, возрастанию напряжения и тока двигателя и его Ми. Через некоторое время в силу этого ротор, двигателя нагрузки возвратится в исходное поло- жение либо (при движении) угол между Фри и Феи снова будет равен а, что приведет к выполнению соотношения:
Ми Ми М3 уменьшится, то угол между
(5)
Мои
Если же Ми Фри и Феи станет меньше а и знак интеграла рассогласования станет противоположен Дсг, что приведет к уменьшению Фсз, Феи и увеличению через некоторое время угла между ФрИ и Феи до «.
При изменении знака Мн угол между Фри и Фси начнет уменьшаться, а рассогласование Ай будет расти в силу отсчета его от Оо, Однако, как указано выше, знак интеграла рассогласования на выходе блока 12 умножения будет противоположен знаку Да, а следовательно, амплитуды статорных полей будут уменьшаться (фиг.26). Под действием Мн через некоторое время поля и Фр3 совпадут (так как амплитуда Феи из-за действия интегратора 16 будет уменьшаться, и значение арз -#ри на выходе сравнивающего элемента 3 изменит знак, что приведет к переключению реле 9 и отсчету рассогласования от нового «о. При этом под действием Мн угол арз - «ри будет расти, и через некоторое время вновь станет равен 90°.
При изменении коэффициента масштабирования и, следовательно, изменении а в схеме будут происходить процессы, полностью аналогичные описанным выше, как и при изменении Ор3 оператором.
Фиг.За иллюстрирует зависимости Ми и М3 соответственно, от угла а., фиг.Зб показывает зависимость угла а от коэффициента масштабирования п. Видно, что зависимость угла а коэффициента масштабирования п лежит в пределах от 0 до любой необходимой величины.
Таким образом, за счет изменения сигнала управления на коммутирующем входе коммутатора 5 на величину, определяемую нелинейным преобразователем 13, удается повысить точность передачи угла и расширить функциональные возможности путем
увеличения диапазона изменения коэффициента масштабирования при отражении нагрузочного момента.
5Формула изобретения
Устройство для дистанционной передачи угла с масштабированием усилий, содержащее на задающем валу синхронную машину с первым датчиком положения, ис10 полнительную синхронную машину с вторым датчиком положения, полупроводниковый коммутатор с коммутирующим и управляющим величиной тока входами, к выходам которого параллельно подключены обмотки
15 статоров синхронных машин, а выходы датчиков положения подключены к входам первого двухвходового сравнивающего элемента, выход которого соединен со входом реле, а выход реле подключен к первым
20 входам трех блоков умножения, второй вход первого блока умножения служит для подачи сигнала,эквивалентного углу в 90°, второй вход второго блока умножения соединен с выходом нелинейного преобра25 зователя коэффициента масштабирования, вход которого является входом установки отношения моментов задающей и исполнительной синхронных машин, а выход второго блока умножения соединен с первым
30 суммирующим входом первого трехвохдо- вого алгебраического сумматора, вычитающий вход которого подключен к выходу второго датчика положения ротора, а выход - к первому входу второго двухводового
35 сравнивающего элемента и через последовательно соединенные интегратор и блок взятия модуля к второму входу третьего блока умножения, выход которого соединен с вторым входом второго двухвходового срав40 ниаающего элемента, выход которого подключен к управляющему величиной тока входу полупроводникового коммутатора, выход первого блока умножения подключен к первому суммирующему входу второго ал45 гебраического сумматора, выход которого подключен к второму суммирующему входу первого алгебраического сумматора и к коммутирующему входу полупроводникового коммутатора, отличающееся тем, что,
50 с целью повышения точности передачи угла поворота и расширения функциональных возможностей путем увеличения диапазона изменения отношения моментов исполнительной и задающей синхронных
55 машин, нелинейный преобразователь коэффициента мастшабирования выполнен в виде арктангенсного преобразователя, второй алгебраический сумматор снабжен вычитающим входом, подключенным к выходу второго
блока умножения, а второй суммирующий подключен к выходу первого датчика поло- вход второго алгебраического сумматора жения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угла с масштабированием усилий | 1985 |
|
SU1617550A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1777207A1 |
| Устройство для дистанционной передачи угла поворота задающего вала с масштабированием усилий | 1985 |
|
SU1702494A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1647789A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1690110A1 |
| Устройство для дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1767636A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1767637A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1619371A1 |
| Устройство для калибровки вентильного электродвигателя | 1987 |
|
SU1417155A1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
Изобретение относится к электротехнике и автоматике. Целью изобретения является повышение точности передачи угла поворота и расширение диапазона изменения отношения моментов п исполнительной (ИМ) и задающей (ЗМ) синхронных машин, за счет задания в ИМ между магнитными полями ротора (Р) и статора (С) угла а, путем преобразования п по закону арктангенса имеющимся в устройстве нелинейным преобразователем. Магнитные поля Р обеих машин взаимно перпендикулярны, а магнитные поля С обеих машин, вследствие параллельного подключения их обмоток к выходам полупроводникового коммутатора, соналравлены. Введение трехвходового алгебраического сумматора и изменение зако- на преобразования коэффициента масштабирования п обеспечивает повышение точности дистанционной передачи угла и расширение диапазона изменения отношения моментрв п ИМ и ЗМ, а вместе с соответствующим образом подключенными реле, интегратором, блоком взятия модуля, тремя блоками умножения на ±1, двумя двухвходовыми и одним трехвходовым сравнивающими элементами обеспечивает работоспособность при изменении направлений моментов оператора и нагрузки и высокую динамическую точность. Особенностью устройства является независимость рассогласования валов, принимающее наименьшую величину, от п. 3 ил. со с
а
Ж ц&
Редактор Н.Козлова
/ Составитель А.Иванов Техред М.Моргентал
о 1
п
Фие.З
Корректор М.Куль
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1647789A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1777207A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
