Изобретение относится к робототехнике и может быть использовано при создании сборочных роботов-манипуляторов .
Целью изобретения является расши- рение функциональных возможностей устройства за счет обеспечения соответствующего изменения направления действия усилия исполнительного органа при изменении нап4)авления его пе- ремещения.
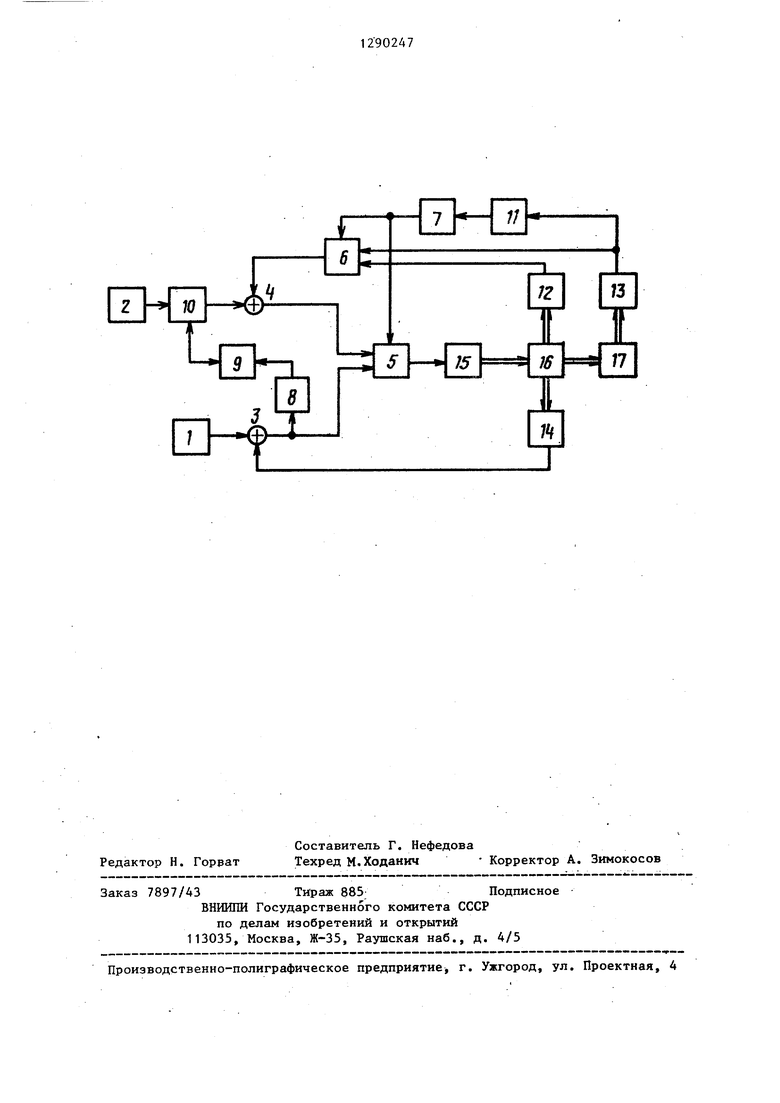
На чертеже представлена функциональная схема устройства.
Устройство содержит задатчики 1 и 2 положения и усилия, первый и вто- рой сумматоры 3 и А, первый и второй коммутаторы 5 и 6, первый и второй усилители-ограничители 7 и 8, блок 9 вьзделения знака, блок 10 умножения, пороговый элемент 11, первый и вто- рой датчики 12 и 13 усилия, датчик 14 положения, привод 15, исполнительный механизм 16, исполнительный орган 17.
Устройство работает следующим образом.
Сигнал задания по положению поступает с задатчика 1 на сумматор 3.Если исполнительный орган 17 находится в свободной зоне, т.е. сигнал с дат- чика 13 усилия отсутствует, то система замкнута по положению. Сигнал ошибки рассогласования поступает через первый коммутатор 5 на привод 15, который приводит в движение че- ,рез исполнительный механизм 16 ис- полнительный орган 17. При контакте исполнительного органа 17с внешним объектом, на выходе датчика 13 усили появляется сигнал, который через эле мент 11 и усилитель-ограничитель 7 переключа Ет первый и второй коммутаторы 5 и 6. Теперь система замкнута по усилию. Положительный сигнал задания по усилию, поступающий от задат- чика 2 усилия, переключается блоком 10 умножения в зависимости от знака сигнала опшбки рассогласования по положению, поступающего через усилитель-ограничитель 8 и блок 9, чем обеспечивается совпадение полярности сигнала задания по усилию, поступающего на привод 15, с требуемым направлением перемещения. Сигнал ошибки рассогласования по усилию, являющий- ся разностью сигнала, поступающего на положительный вход второго сумматора А, и сигнала, поступающего с датчика 13 усилия через второй комм5
5 О 5 0 5
татор 6 на отрицате льный вход второго сумматора 4, поступает через первый коммутатор 5 на привод 15 через исполнительный механизм 16, развивающий усилия на исполнительном органе 17. Вешичина развиваемого усилия соответствует величине сигнала задания по усилию, а направление совпадает с требуемым направлением перемещения.
Применение изобретения позволяет автоматически изменять направление развиваемого усилия в соответствии со знаком сигнала ошибки канала,замкнутого п:о положению, т.е. в соответствии с требуемым направлением перемещения.
Формула изобретения
Устройство для управления манипулятором, содержащее задатчик усилия, последовательно соединенные задатчик положения, первый сумматор, первый коммутатор и привод, кинематически связанный через исполнительный механизм с датчиком положения, выход которого подключен к второму входу первого сумматора, с первым датчиком усилия и исполнительным органом, кинематически связанным с вторым датчиком усилия, выход которого соединен через последовательно подключенные пороговый элемент, первый усилитель-ограничитель, второй коммутатор с первым входом второго сумматора, выход второго датчика усилия соединен также с вторым входом второго коммутатора, подключенного третьим входом к выходу первого датчика усилия, выход второго сумматора соединен с вторым входом первого коммутатора, третий вход которого подключен к выходу первого усилителя-ограничителя, отличающееся тем, что, с целью расширения функциональных возможностей устройства за счет обеспечения соответствующего изменения направления действия усилия исполнительного органа при изменении направления его перемещения, оно содержит последовательно соединенные второй усилитель-ограничитель, блок выделения знака и блок умножения, второй вход которого подключен к выходу задатчика усилия, и выход - к второму входу второго сумматора, а вход второго усилителя-ограничителя соединен с выходом первого сумматора.
Редактор Н. Горэат
Составитель Г. Нефедова
Техред М.Ходанич Корректор А. Зимокосов
Заказ 7897/43Тираж 885;Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1985 |
|
SU1321582A1 |
| Устройство для управления манипулятором | 1990 |
|
SU1717338A1 |
| Устройство для управления сборочным роботом | 1983 |
|
SU1091115A1 |
| Устройство для управления промышленным роботом | 1984 |
|
SU1264137A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| СИЛОКОМПЕНСИРУЮЩИЙ ЭЛЕКТРОПРИВОД СБАЛАНСИРОВАННОГО МАНИПУЛЯТОРА | 2011 |
|
RU2454694C1 |
| Система динамического позиционирования судном | 1989 |
|
SU1615678A1 |
| Система автоматического управления листоформовочной машиной | 1985 |
|
SU1308499A1 |
| Устройство автоматического регулирования скорости подачи угледобывающей машины | 1980 |
|
SU928007A1 |
| Устройство для управления копирующим манипулятором | 1980 |
|
SU935871A1 |
Изобретение относится к области ротоботехники и может быть использовано при создании сборных роботов манипуляторов. В устройстве за счет введения второго усилителя-ограничителя, блока выделения знака и блока умножения обеспечивается автоматическое изменение направления действия усилия исполнительного органа при изменении направления его перемещения, что расширяет функциональные возможности устройства. 1 ил. N9 СО о 1С 4ib 
| Устройство для управления сборочным манипулятором | 1980 |
|
SU930228A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Устройство для управления копирующим манипулятором | 1984 |
|
SU1234807A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
