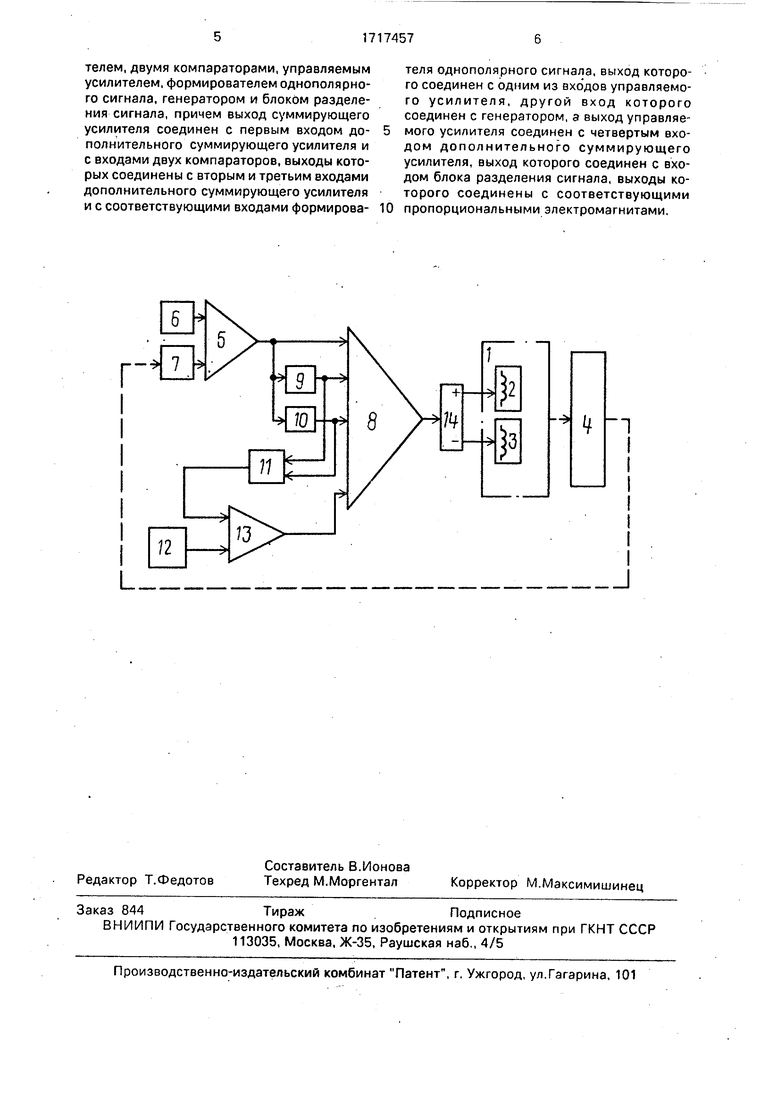
первым входом суммирующего усилителя 8 и входами компараторов 9 и 10, выходы которых соединены с вторым и третьим входами суммирующего усилителя 8 и входами формирователя 11 однополярного сигнала. Выход формирователя 11 однополярного сигнала и выход генератора 12 гармонического сигнала соединены с управляющими и информационными соответственно входами управляемого усилителя 13, выход которого соединен с четвертым входом суммирующего усилителя 8, а выход соединен с входом блока 14 разделения сигнала, к выходам которого подключены пропорциональные электромагниты 2 и 3.
Устройство работает следующим-образом. В исходном положении исполнительный механизм пропорционального электрогидравлического привода 1 находится в состоянии покоя, и на электромагниты 2 и 3 поступают соответственно положительная и отрицательная полуволны гармо- нического сигнала, вызывающие возвратно-поступательное движение якоря электромагнита, достаточные для устранения трения покоя и люфтов в сочленяющих частях электрогидравлического привода. При этом механизм 4 поворота находится в состоянии покоя, сигнал рассогласования на выходе суммирующего усилителя 5 равен нулю, т.е. сигналы с задатчика 6 курса и датчика 7 положения уравновешивают друг друга, выходные сигналы компараторов 9 и 10, формирователя 11 однополярного сигнала равны нулю. На информационный вход управляемого усилителя 13 поступает гармонический сигнал с генератора 12. На выходе управляемого усилителя 13 формируется гармонический сигнал, соответствующий исходному состоянию, который через суммирующий усилитель 8 поступает на блок 14 разделения сигнала, где гармонический сигнал разделяется на положительные vi отрицательные полуволны. Каждая полуволна поступает соответственно на элект- рюмагниты 2 и 3.
При изменении сигнала на выходе задатчика 6 курса по отношению к сигналу на выходе датчика 7 положения на выходе суммирующего усилителя 5 появляется отличный от нуля сигнал рассогласования, например положительный,
При значении сигнала рассогласования больше некоторого заданного на выходе компаратора 9 появляется постоянное положительное значение сигнала, который, проходя через-формирователь 11 однопо- яярного сигнала, воздействует на управляющий вход управляемого усилителя 13.
Одновременно на информационный вход управляемого усилителя 13 поступает опорный гармонический сигнал с генератором 12. На выходе управляемого усилителя
13 формируется сигнал, амплитуда которого меняется в соответствии с величиной управляющего сигнала.
В дальнейшем сигналы, поступившие на первый, второй и четвертый входы суммирующего усилителя 8 преобразуются в сигнал на выходе, который содержит положительную постоянную составляющую, пропорциональную сигналу рассогласования с наложенным на нее гармоническим
сигналом.
Сигнал с суммирующего усилителя 8 через блок 14 разделения сигнала воздействует на электромагнит 2 электрогидравлического привода 1 таким образом, что вызывает отклонение механизма поворота на угол, соответствующий изменению курса. При этом значение сигнала на выходе датчика 7 положения, кинематически связанного с механизмом 4 поворота, компенсирует величину
сигнала на выходе задатчика 6 курса. При этом сигнал рассогласования на выходе суммирующего усилителя 5 становится равен нулю, и устройство возвращается в исходное состояние.
При отрицательном значении сигнала рассогласования больше некоторого заданного на выходе компаратора 10 появляется постоянное отрицательное значение сигнала,
Сигналы, поступающие на первый, третий, четвертый входы суммирующего усилителя 8, преобразуются в сигнал на выходе, содержащий отрицательную постоянную составляющую, пропорциональную сигналу
рассогласования с наложенным на нее гармоническим сигналом. Этот сигнал через блок 14 разделения сигнала и электромагнит 3 электрогидравлического привода 1 вызывает отклонение механизма поворота в
другую сторону.
Формула изобретения Устройство автоматического управления механизмом поворота транспортного средства, содержащее пропорциональный электрогидравлический привод с двумя пропорциональными электромагнитами, кинематически связанный с механизмом поворота, и суммирующий усилитель, один вход которого соединен с задатчиком курса, а другой - с датчиком положения, кинематически связанным с механизмом поворота, отличающееся тем, что, с целью повышения точности управления, оно снабжено дополнительным суммирующим усилителем, двумя компараторами, управляемым усилителем, формирователем однополярно- го сигнала, генератором и блоком разделения сигнала, причем выход суммирующего усилителя соединен с первым входом дополнительного суммирующего усилителя и с входами двух компараторов, выходы которых соединены с вторым и третьим входами дополнительного суммирующего усилителя и с соответствующими входами формирова0
теля однополярного сигнала, выход которого соединен с одним из входов управляемого усилителя, другой вход которого соединен с генератором, а выход управляемого усилителя соединен с четвертым входом дополнительного суммирующего усилителя, выход которого соединен с входом блока разделения сигнала, выходы которого соединены с соответствующими пропорциональными электромагнитами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления инвертором с однополярной частотно-импульсной модуляцией | 2024 |
|
RU2829334C1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРОВКИ ДВУХ ПРОФИЛЬНЫХ ЗАГОТОВОК, В ЧАСТНОСТИ РЕЛЬСОВ, В МАШИНЕ ДЛЯ КОНТАКТНОЙ СТЫКОВОЙ СВАРКИ | 1999 |
|
RU2192339C2 |
| Устройство для формования теплоизоляционных изделий | 1988 |
|
SU1523354A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АВТОНОМНЫМ ИНВЕРТОРОМ | 2014 |
|
RU2558722C1 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| Электрогидравлическая система управления насосной установкой | 1986 |
|
SU1418505A1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ ГАРМОНИЧЕСКИХ ИСКАЖЕНИЙ (ВАРИАНТЫ) | 2003 |
|
RU2247996C2 |
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| Устройство управления процессом формования пленочных материалов | 1989 |
|
SU1671742A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
Г
„-I
-
ч
