1
изобретение относится к подъёмно- транспортной технике, а именно к грузозахватным устройствам для подъема и транспортирования штучных грузов, преимущественно с плоской возду- хонепроницаемой поверхностью, и может найти применение в любой отрасли народного хозяйства.
Целью изобретения является повышение удобства эксплуатации и снижение энергозатрат.
На фиг. 1 представлен предлагаемый вакуумньй электромагнитный захват в рабочем положении электромагнита, общий вид; на фиг, 2 - то
же, в рабочем положении вакуумной камеры.
Предлагаемое устройство содержит концентрично расположенные электро- магнитньш грузозахватньй орган в виде цилиндрического электромагнита 1 с катушкой 2 возбуждения и вакуумньй грузозахватиьй орган в виде корпуса 3 с эластичной уплотнительной манжетой 4. Грузозахватные органы соединены между собой эластичной диафрагмой 5.
Герметичная пневмокамера о( образована диафрагмой 5, корпусом 6 и верхним торцом электромагнита 1. Между торцами корпуса 6 и электромагнита 1 установлен пружина 7 сжатия t К торцу корп са 6 прикреплен золотниковьй рапрёделитель, выполнен ньй в виде втулки 8 со ступенчатой кольцевой расточкой о и радиальными каналами & . Диаметр верхней части кольцевой расточки S больше диаметра нижней ее части.
Втулка 8 охватьшает грузовой шток 9, образуя по нижней чисти кольцевой расточки S узкую кольцевую щель. -Подвижное соединение втулки 8 с грузовым штоком 9 уплот- нено кольцом 10.
Грузовой шток 9 закреплен на электромагните 1, его осевой канал ; 2 выполнен глухим в верхней части. Грузовой шток также снабжен
радиальными каналами Ч , через которые, а также осевой канал е электромагнита 1 он сообщен с вакуумной захватной камерой ж.
Расстояние В| между каналами о штока и каналом верхней части кольцевой расточки 5 втулки 8 равно ходу h, перевода вакуумного грузозахват 5
2045382
кого органа с манжетой 4 в рабочее
положение.
между каналами
5
0
5
0
5
0
5
0
5
Растояние ;
и концом верхней части кольцевой; расточки S равно полному ходу - h электромагнита 1 до упора. Для соединения пневмокамеры о с источником вакуума ( условно не показан ) предусмотрен штуцер 12,
Устройство работает следующим образом
В исходном положении вакуум к нему не подключен, а электромагнитный грузозахватный орган находится в рабочем положении При этом пружина 7 удерживает вакуумный грузозахватный орган °в нерабочем положении.
Радиальные каналы Q грузового штока 9 перекрыты поверхностью втулки В, кольцевая расточка S перекрыта поверхностью грузового штока 9, вследствие чего пневмокамера с( герметизована. Захват установлен на поверхность груза 11. При работе электромагнитным грузозахватным органом подают электропитание на катушку
2возбуждения электромагнита 1, вследствие чего груз захватывается электромагнитным полем. Сброс груза осуществf ляется снятием питания с катушки 2 Боэбуждёния,
При работе вакуумным грузозахватным органом пневмокамеру of подключают через штуцер 12 к источнику вакуума. При этом сила внешнего атмосферного давления на корпус 6, электромагнит 1 и. диафрагму 5 преодолевает сопротивление пружины 7, уменьшая объем пневмокамеры а . Таким образом, вакуумньй грузозахватный орган переводится в рабочее положение: мантежа 4 вместе с корпусами 6 и
3опускается до соприкосновения с поверхностью груза 11, уплотняет поверхность своего контакта с ним. При опус- корпуса 6 пневмокамеры втулка 8 также опускается, Радиальные каналы
грузовс го штока 9 входят в кольцевую щель, сообщаясь через радиальные каналы 6 втулки 8 с пнев- м й амерой а . Часть вакуума при этом теряется через осевой канал
2 грузового штока 9 и е электромагнита 1, Однако потери эти незначительны,, поскольку площадь сечения кольцевой щели втулки 8 мала и составляет не больше 25% площади сечения подводящего штуцера 12. Кроме тога, за счет большой площади поверхности диафрагмы 5 достаточно незначительного перепада давления для быстрого . преодоления сопротивления пружины 7 и посадки манжеты 4 на поверхность груза 11.
Каналы штока входят в верхнюю часть кольцевой расточки , вследствие чего захватная камера м сообщается через осевые каналы 1 грузового штока 9 и 6 электромагнита 1 с камерой и и через штуцер 12 с источником вакуума... Давление в камерах а и ж. вьфавнивает- ся. Вакуумный грузозахватный орган прижимается силой внешнего атмосферного давления к поверхности груза 11, груз захватьшается и может транспортироваться. Сброс груза 11 производится отключением камеры а от
источни.ка вакуума и сообщением ее с атмосферой.
При этом давление в камере а и Ь сообщенной с ней через каналы , и , -2 , 5 камере Н повышается. Пружина распрямляется и поднимает корпуса 6 и 3 вместе с манжетой 4, переводя вакуумЧ ный грузозахватный орган в нерабочее .
положение.
Под действием пружины 7 подъем вакуумного грузозахватного органа происходит быстрее, чем повышение давления в вакуумной захватной камере Ж , вследствие чего манжета 4 залипает на поверхности груза 11,
Однако наличие кольцевой щели втулки 8 обеспечивает повьшхение давления под манжетой 4 до атмосферного
и способствует отрыву ее от поверхности груза.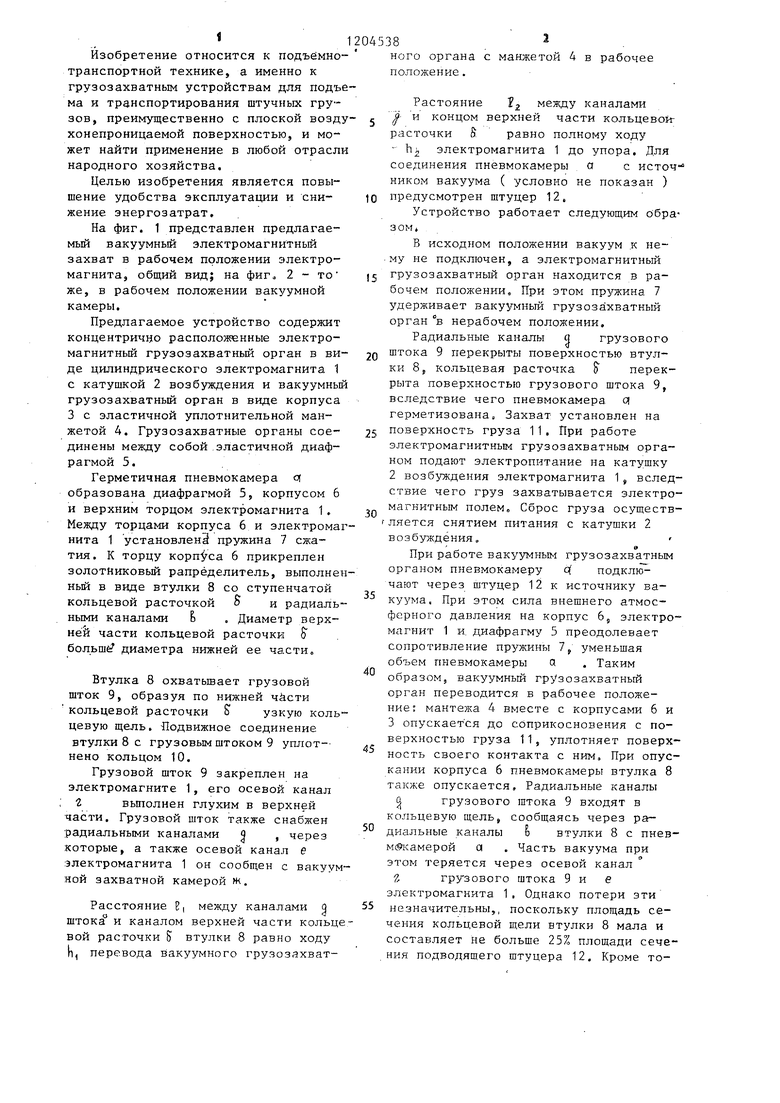

| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный безнасосный захват | 1980 |
|
SU935427A1 |
| Вакуумное грузозахватное устройство | 1986 |
|
SU1373666A1 |
| Вакуумный захват | 1983 |
|
SU1102763A2 |
| Распределительный кран вакуумного захватного устройства | 1984 |
|
SU1162724A1 |
| Противоподсосный распределитель вакуумного грузозахватного устройства | 1981 |
|
SU1049404A1 |
| Вакуумное захватное устройство | 1979 |
|
SU846480A1 |
| Вакуумное грузозахватное устройство | 1989 |
|
SU1676989A1 |
| Противоподсосный клапан вакуумного грузозахватного устройства | 1984 |
|
SU1162725A1 |
| Противоподсосный клапан вакуумного грузозахватного устройства | 1984 |
|
SU1263607A1 |
| Грузозахватное устройство | 1990 |
|
SU1745664A1 |
V
Z
Л(
I
Фиг. г
Составитель А. Гаевский Редактор Л. Бандура Техред А.Бабинец - Корректор М.
Заказ 8484/21 Тираж 803Подписное
ВНИШИ Государственнного комитета СССР
по делам изобретений и открытий (13035, Москва, Ж-35, Раушская наб., д. 4/5
„„ .в - ---- - -- .ей-.-.1-. --.
Филиал ПИП Патент, г. Ужгород, ул. Проектная, 4
| Патент США № 3159418,кл.254- 65- 5, 1966. |
