(54) ВАКУУМНОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО

| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное грузозахватное устройство | 1982 |
|
SU1054268A2 |
| Вакуумное грузозахватное устройство | 1980 |
|
SU943166A1 |
| Вакуумное захватное устройство | 1978 |
|
SU779246A1 |
| Вакуумное грузозахватное устройство | 1984 |
|
SU1199734A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1306881A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1324980A1 |
| Вакуумное захватное устройство | 1977 |
|
SU686967A1 |
| Грузозахватное устройство | 1988 |
|
SU1615129A1 |
| Вакуумное грузозахватное устройство | 1989 |
|
SU1676989A1 |
| Грузозахватное устройство | 1989 |
|
SU1622274A1 |



I
Изобретение относится к подъемнотранспортной технике, а именно к вакуумным грузозахватным устройствам и предназначено для подъема и транспортирования различных штучнъис грузов, преимущественно с воздухонепроницаемой поверхностью (металл, пластмассы, мрамор и т.д.).
Известно вакуумное захватное устройство, содержащее корпус с вакуумообрааующим цилиндром, поршень со штоками, вакуумную захватную камеру суплотнением и механизм автоматического переключения ходов поршня 1 .
Это устройство обладает большим временем захвата и освобождения груза и имеет весьма сложную и ненадежную в работе конструкцию механизма автоматичес14ого переключения ходов поршня.
Наиболее близким по технической сущности к предлагаемому является вакуумное грузозахватное устройство, содержащее корпус с вакуумобразующим цилиндром, поршень со штоками, вакуумную
захватную камеру и механизм автоматического переключения ходов поршня, включающий в себя вал со стопорными элементами и упоры, взаимодействующие с ними при перемещении штоков 23 .
Недостатком известного устройства является ненадежность его работы нз-аа наличия возвратной пружины и наличия перепускнък клапанов воздуха, которые в то же время увеличивают время зах- .
10 вата и освобождения груза.
Цель изобретения - повьпиение надежности работы и уменьшение времени на захват и освобождение груза.
Указанная цель достигается тем, что
15 в устройстве вал со стопоряыми механи мами переключения ходов поршня закреплен на верхней часта корпуса, а упоры на штоках поршня, причем соединение щтоков с поршнем выполнено с возмояс-
20 ностыб из свободного хода относительно поршня на величину, нeoбxoJПlимyю для срабатывания механизма переключения, при этом один из упоров выполнен с
открьпъщ горизонтальным пазом, нижняя сторона которого короче верхней.
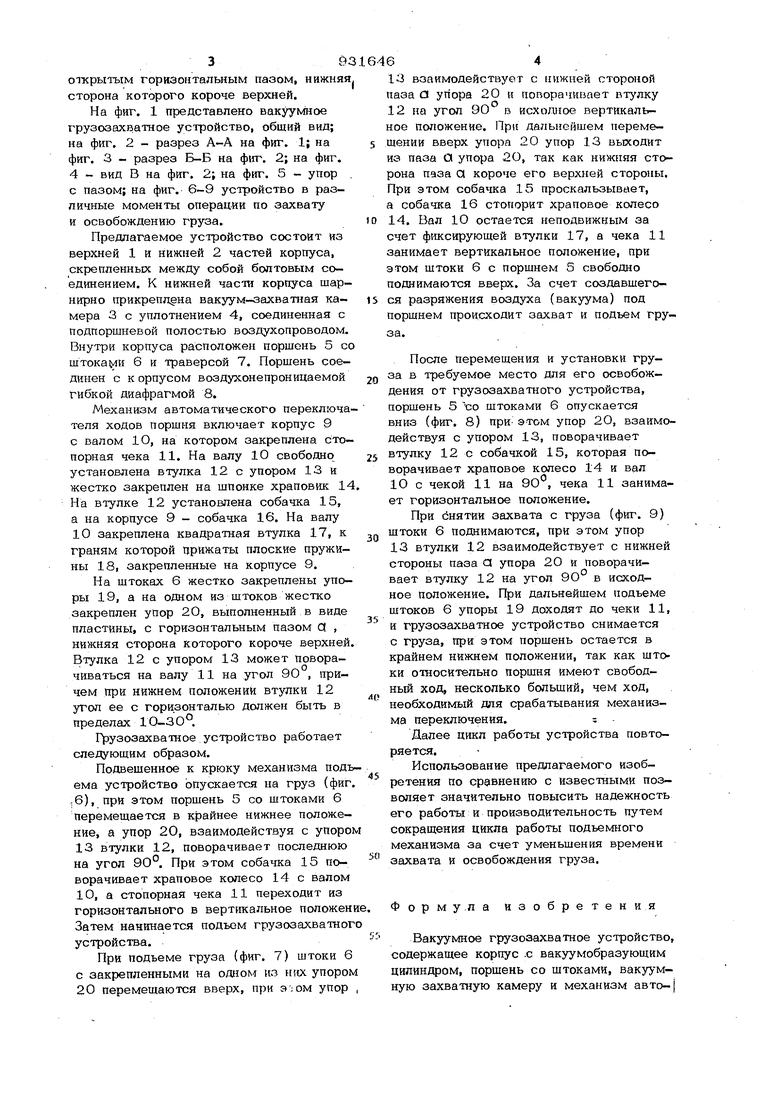
На фиг. 1 представлено вакуумное грузозахватное устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на . 2; на фиг. 4 вид В на фиг. 2; на фиг, 5 - упор с пазом; на фиг. 6-9 устройство в различные моменты операции по захвату и освобождению груза.
Предлагаемое устройство состоит из верхней 1 и нижней 2 частей корпуса, скрепленных между собой болтовым соединением. К нижней части корпуса шар- нирно прикреплена вакуум-захватная камера 3 с уплотнением 4, соединенная с подпоршневой полостью воздухопроводом. Внутри корпуса расположен поршень 5 со штоками 6 и траверсой 7. Поршень соединен с корпусом воздухонепроницаемой гибкой диафрагмой 8.
Механизм автоматического переключа- теля ходов поршня включает корпус 9 с валом 10, на котором закреплена стопорная чека 11. На валу 10 свободно установлена втулка 12 с упором 13 и жестко закреплен на шпонке храповик 14 На втулке 12 установлена собачка 15, а на корпусе 9 - собачка 16. На валу 10 закреплена квадратная втулка 17, к граням которой прижаты плоские пружины 18, закрепленные на корпусе 9.
На штоках 6 жестко закреплены упоры 19, а на одном из штоков жестко закреплен упор 20, выполненный в виде пластины, с горизонтальным пазом О , нижняя сторона которого короче верхней. Втулка 12 с упором 13 может поворачиваться на валу 11 на угол 90 , причем при нижнем положении втулки 12 угол ее с горизонталью должен быть в пределах 1О-30°
Грузозахватное устройство работает следующим образом.
Подвешенное к крюку механизма подъема устройство опускается на груз (фиг. :6), при этом поршень 5 со штоками 6 перемещается в к эайнее нижнее положение, а упор 20, взаимодействуя с упором 13 втулки 12, поворачивает последнюю на угол 90°. При этом собачка 15 поворачивает храповое колесо 14 с валом 10, а стопорная чека 11 переходит из горизонтального в вертикальное положени Затем наминается подъем грузозахватног устройства.
При подъеме груза (фиг. 7) штоки 6 с закрепленными на из них упором 20 перемещаются вверх, при э;ом упор
13 взаимодействует с нижней стороной паза СЗ упора 20 и поворачивает втулку
12на угол 90° в исхошюе вертикальное положение. При дальнейшем перемещении вверх упора 20 упор 13 выходит из паза О упора 2О, так как нижняя сторона паза а короче его верхней стороны. При этом собачка 15 проскальзывает,
а собачка 16 стопорит храповое колесо 14. Вал 10 остается неподвижным за счет фиксирующей втулки 17, а чека 11 занимает вертикальное положение, при этом штоки 6 с Поршнем 5 свободно поднимаются вверх. За счет создавшегося разряжения воздуха (вакуума) под Поршнем происходит захват и подъем груза.
После Перемещения и установки груза в требуемое место для его освобождения от грузозахватного устройства, поршень 5 Ъо штоками 6 опускается вниз (фиг. 8) при-этом упор 2О, взаимодействуя с упором 13, поворачивает втулку 12 с собачкой 15, которая поворачивает храповое колесо 14 и вал 10 с чекой 11 на 90 , чека 11 занимает горизонтальное положение.
При снятии захвата с груза (фиг. 9) штоки 6 поднимаются, при этом упор
13втулки 12 взаимодействует с нижней стороны паза а упора 20 и поворачивает втулку 12 на угол 9О в исходное положение. При дальнейшем подъеме штоков 6 упоры 19 доходят до чеки 11, и грузозахватное устройство снимается
с груза, при этом поршень остается в крайнем нижнем положении, так как штоки относительно поршня имеют свободный ход, несколько больший, чем ход, необходимый для срабатывания механизма переключения.i Далее цикл работы устройства повторяется.
Использование предлагаемого изобретения по сравнению с известными позволяет значительно повысить надежность его работы и производительность путем сокращения цикла работы подъемного механизма за счет уменьшения времени захвата и освобождения груза.
Форму.л а изобретения
Вакуумное грузозахватное устройство, содержащее корпус .с вакуумобразующим цилиндром, поршень со штоками, вакуумную захватную камеру и механизм авто593
матипеского переключения ходов поршня, включающий в себя вал со стопорными элементами и упоры, взаимодейстпующие с ними при перемещении штоков, о т лич.ающееся тем, что, с целью повьпиения надежности работы и уменьшения времени на захват и освобождение груза, вал со стопорными элементами механизма переключения ходов поршня закреплен на верхней части корпуса, а упоры на штоках поршня, причем ооедннение штоков с поршнем выполнено с возможностью их свободного хода относительно поршня на величину, необходиIQ
66
мую для -арабатынания механизма переключения, при этом один из упоров выполнен с открытым горизонтальным пазом, нижняя сторона которого короче верхней.
Источники информации, принятые во внимание при экспертизе
.
фиеЛ
16 17 9 10 JLj. j2
m m
5-6
Ш
Фаг. 5
11
Y
/.
L
1
y
15 a
18
фигЛ
9
г.6
/
7
D
фиг. 5
//
г.7
