Способ определения постоянной времени динамически настраиваемого гироскопа в режиме обратной связи, включающий разгон ротора до рабочей скорости, отклонение ротора на постоянный угол по одной оси чувствительности, измерение моментов через токи обратных связей по двум осям чувствительности и определение постоянной времени по измеренным параметрам, отличающийся тем, что, с целью повышения его точности и упрощения реализации, снижают скорость вращения ротора и при том же отклонении ротора по той же оси чувствительности измеряют изменение момента через ток обратной связи по другой перпендикулярной оси чувствительности, а величину постоянной времени рассчитывают по формуле
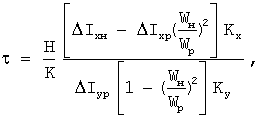
H - кинетический момент при рабочей скорости Wp;
K - полусумма угловых жесткостей по осям подвеса;
Kx, Ky - крутизна по току датчиков момента каналов обратной связи x и y соответственно;
ΔIxp, ΔIyp - изменение токов при отклонении ротора в каналах обратной связи x и y соответственно при рабочей скорости ротора;
ΔIхн - изменение тока в канале обратной связи по оси чувствительности, перпендикулярной к оси отклонения, при пониженной скорости вращения.

