По известному способу определения вертикальной координаты положения центра масс транспортного средства осуществляют измерение вертикальной нагрузки транспортного средства на его заднюю ось при горизонтальном расположении и при поднятии ее на минимальный угол 15° относительно горизонтальной плоскости. По разности этих нагрузок, вызванных перераспределением масс транспортного сред- ства, определяют вертикальную координату положения центра масс транспортного средства.
Однако при поднятии оси транспортного средства на минимальный угол 15° элемен- ты подвески приходится блокировать ввиду их податливости для достижения соответствующей жесткости подвески транспортного средства, что связано с большими трудозатратами, связанными с необходимостью из готовления специальной блокирующей оснастки для каждой модели транспортного средства, которая к тому же не в состоянии осуществить полное блокирование упругих элементов подвески, что снижает точность измерения.
Цель изобретения - повышение точности определения вертикальной координаты центра масс транспортного средства, а также снижение трудозатрат и упрощение спо- соба определения вертикальной координаты положения центра масс транспортного средства.
Поставленная цель достигается тем, что согласно способу определения вертикаль- ной координаты положения центра масс транспортного средства, заключающемуся в том, что фиксируют переднюю ось транспортного средства, задают угол поднятия задней оси, поднимают ее относительно го- ризонтальной плоскости на заданный угол и измеряют вертикальную нагрузку на заднюю ось, последнюю опускают относительно горизонтальной плоскости и дополнительно измеряют вертикальную на- грузку на эту ось, измерение вертикальной нагрузки на заднюю ось производят при поднятии и опускании задней оси на угол, равный половине заданного, вертикальную координату положения центра масс транс- портного средства определяют в соответствии с зависимостью
п тг
1 L Gi-G2
где hz - вертикальная координата центра масс транспортного средства относительно опорной горизонтальной плоскости;
Gi, G2 - вертикальная нагрузка на заднюю ось от массы транспортного средства
соответственно в крайних верхнем и нижнем положениях задней оси;
G - вес транспортного средства;
L- база транспортного средства; а - суммарный угол поворота транспортного средства в продольной вертикальной плоскости в прямом и обратном направлениях относительно опорной горизонтальной плоскости.
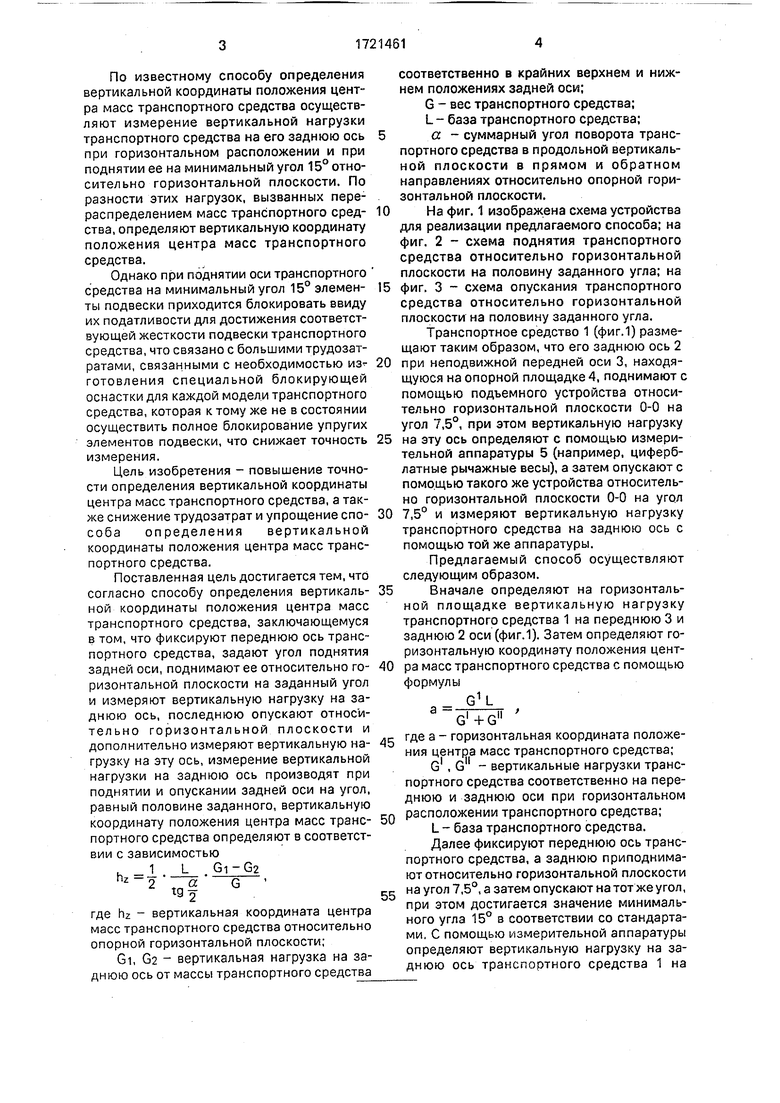
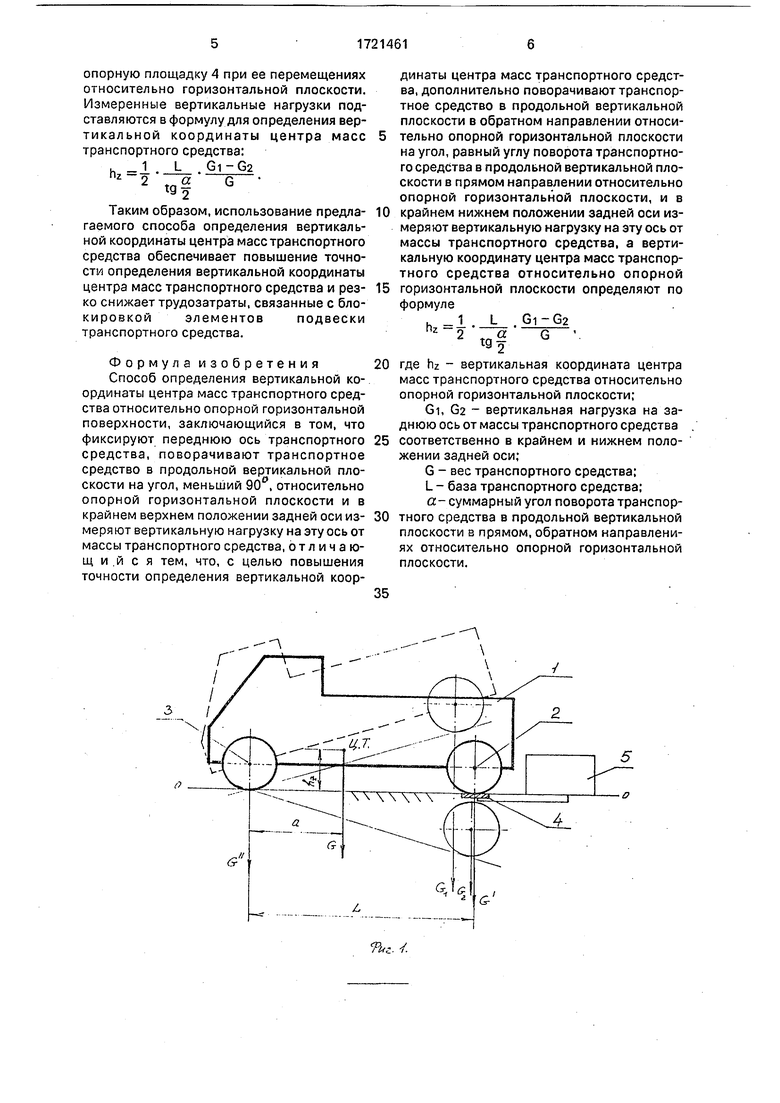
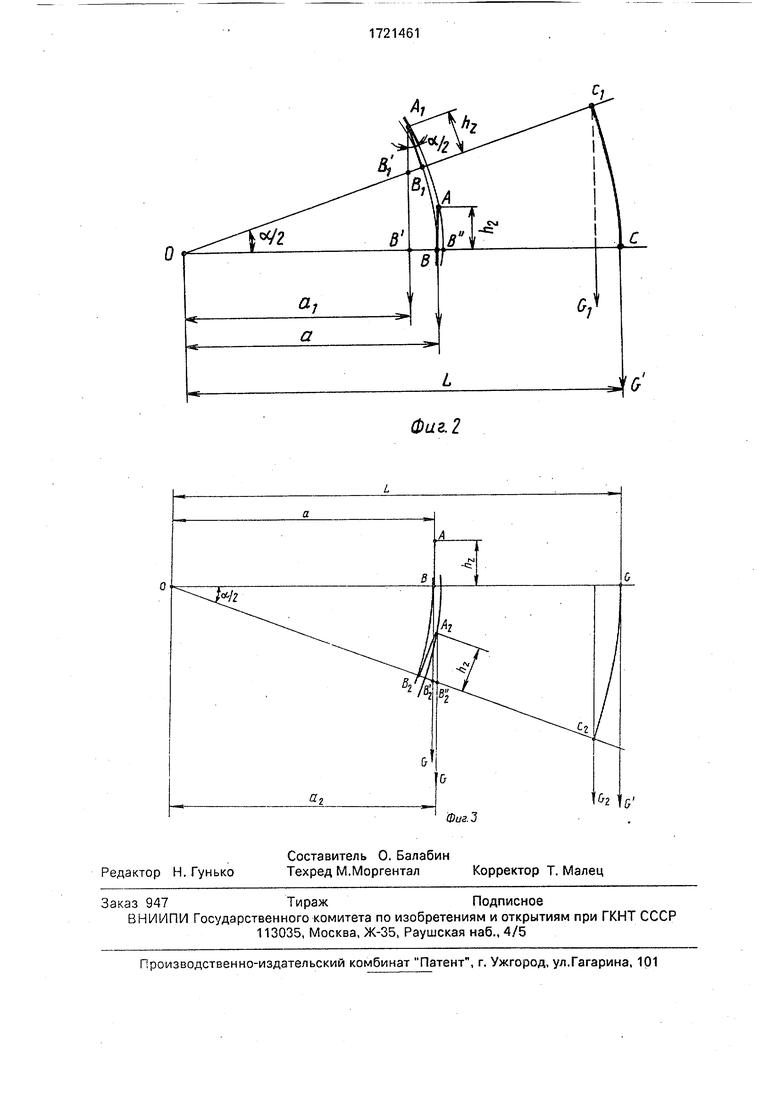
На фиг. 1 изображена схема устройства для реализации предлагаемого способа; на фиг. 2 - схема поднятия транспортного средства относительно горизонтальной плоскости на половину заданного угла; на фиг. 3 - схема опускания транспортного средства относительно горизонтальной плоскости на половину заданного угла.
Транспортное средство 1 (фиг.1) размещают таким образом, что его заднюю ось 2 при неподвижной передней оси 3, находящуюся на опорной площадке 4, поднимают с помощью подъемного устройства относительно горизонтальной плоскости 0-0 на угол 7,5°, при этом вертикальную нагрузку на эту ось определяют с помощью измерительной аппаратуры 5 (например, циферблатные рычажные весы), а затем опускают с помощью такого же устройства относительно горизонтальной плоскости 0-0 на угол 7,5° и измеряют вертикальную нагрузку транспортного средства на заднюю ось с помощью той же аппаратуры.
Предлагаемый способ осуществляют следующим образом.
Вначале определяют на горизонтальной площадке вертикальную нагрузку транспортного средства 1 на переднюю 3 и заднюю 2 оси (фиг.1). Затем определяют горизонтальную координату положения центра масс транспортного средства с помощью формулы
Я
G1L G +G
где а - горизонтальная координата положения центра масс транспортного средства;
G1, G - вертикальные нагрузки транспортного средства соответственно на переднюю и заднюю оси при горизонтальном расположении транспортного средства;
L - база транспортного средства.
Далее фиксируют переднюю ось транспортного средства, а заднюю приподнимают относительно горизонтальной плоскости на угол 7,5°, а затем опускают на тот же угол, при этом достигается значение минимального угла 15° в соответствии со стандартами. С помощью измерительной аппаратуры определяют вертикальную нагрузку на заднюю ось транспортного средства 1 на
опорную площадку 4 при ее перемещениях относительно горизонтальной плоскости. Измеренные вертикальные нагрузки подставляются в формулу для определения вер- тикальной координаты центра масс транспортного средства:
hz - 2
L G1-G2
tgf
Таким образом, использование предлагаемого способа определения вертикальной координаты центра масс транспортного средства обеспечивает повышение точности определения вертикальной координаты центра масс транспортного средства и резко снижает трудозатраты, связанные с бло- кировкой элементов подвески транспортного средства.
Формул а изо бретени я Способ определения вертикальной координаты центра масс транспортного средства относительно опорной горизонтальной поверхности, заключающийся в том, что фиксируют переднюю ось транспортного средства, поворачивают транспортное средство в продольной вертикальной плоскости на угол, меньший 90 , относительно опорной горизонтальной плоскости и в крайнем верхнем положении задней оси измеряют вертикальную нагрузку на эту ось от массы транспортного средства, отличаю- щ и .и с я тем, что, с целью повышения точности определения вертикальной коор0
5
динаты центра масс транспортного средства, дополнительно поворачивают транспортное средство в продольной вертикальной плоскости в обратном направлении относительно опорной горизонтальной плоскости на угол, равный углу поворота транспортного средства в продольной вертикальной плоскости в прямом направлении относительно опорной горизонтальной плоскости, и в крайнем нижнем положении задней оси измеряют вертикальную нагрузку на эту ось от массы транспортного средства, а вертикальную координату центра масс транспортного средства относительно опорной горизонтальной плоскости определяют по формуле
1
ъ%
Gi-G2 G
где hz - вертикальная координата центра масс транспортного средства относительно опорной горизонтальной плоскости;
Gi, 62 - вертикальная нагрузка на заднюю ось от массы транспортного средства соответственно в крайнем и нижнем положении задней оси;
G - вес транспортного средства;
L - база транспортного средства;
а- суммарный угол поворота транспортного средства в продольной вертикальной плоскости в прямом, обратном направлениях относительно опорной горизонтальной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С ЧЕТЫРЬМЯ ОПОРНЫМИ КОЛЕСАМИ, РАЗМЕЩЕННЫМИ ПО РОМБИЧЕСКОЙ СХЕМЕ | 2011 |
|
RU2455188C1 |
| ЗАЩИТНЫЙ ЭКРАН ПРОТИВ ПРОКАЛЫВАНИЯ ПНЕВМАТИЧЕСКИХ ШИН | 2022 |
|
RU2804435C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТНЫМИ КОЛЕСАМИ НАЗЕМНОГО БЕЗРЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2320512C1 |
| Способ определения статической устройчивости транспортных средств | 2022 |
|
RU2788539C1 |
| Способ поворота, обеспечивающий безуводный режим качения шин двухосной мобильной машины | 2017 |
|
RU2656983C1 |
| ПОДВЕСКА ЗАДНИХ КОЛЕС И МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2619147C2 |
| Способ измерения вертикальной координаты центра тяжести объекта | 2019 |
|
RU2711210C1 |
| МНОГООСНАЯ ПОЛНОПРИВОДНАЯ МАШИНА ВОЕННОГО НАЗНАЧЕНИЯ | 2023 |
|
RU2837126C2 |
| Складная эстакада для погрузки-разгрузки вагонов и фургонов | 2018 |
|
RU2691485C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС | 2011 |
|
RU2487330C2 |
&
Фиг. 2
Фиг.З
