Изобретение относится к наземным мобильным машинам, оборудованным колесами с пневмошинами и имеющим управляемые и неуправляемые колеса.
Сущность изобретения заключается в способе поворота мобильной машины, управляемые колеса которой при повороте на углы αв для внутреннего и αн для наружного одновременно отклоняются в сторону центра поворота на углы βс и βн соответственно, а неуправляемые колеса совершают при этом наклон в сторону центра поворота на углы γс для внутреннего и γн для наружного соответственно колес.
В этом случае достигается оптимальный безуводный режим качения всех колес мобильной машины при ее движении по криволинейной траектории. Данное мероприятие помимо снижения сопротивления качению и износа шин способствует повышению поперечной устойчивости мобильной машины и снимает вопрос отнесения ее к недостаточной, нейтральной или избыточной поворачиваемости, а известный критерий, определяеющий критическую скорость наступления неуправляемого режима движения машины, теряет свой смысл, т.к. при отсутствии увода шин режим их качения аналогичен качению жесткого колеса.
Изобретение относится к колесным безрельсовым мобильным машинам и может быть использовано на автомобилях, колесных тракторах, дорожных и сельскохозяйственных машинах, на которых установлены пневматические шины.
Известен способ (патент Великобритании №227047, кл. B62D 9/00, 1984 г.), в котором при повороте машины плоскости управляемых колес вместе с кузовом наклоняются в сторону центра поворота на одинаковые углы. Недостатком этого способа является то, что при повороте машины наклон плоскостей управляемых колес, движущихся по траектории различной кривизны, при одинаковом их наклоне не в состоянии обеспечить оптимальный режим их качения.
Существует способ (авторское свидетельство №1240675, кл. B63D 15/00, 1986 г.) изменения направления движения мобильной машины, в котором каждое управляемое колесо радиусом r при повороте в горизонтальной плоскости наклоняют его в вертикальной плоскости на угол β в зависимости от радиуса R поворота транспортного средства по формуле:
Недостатком указанного способа является устанавливаемая связь между конструктивным, в частности радиусом колеса r, и кинематическим радиусом поворота R мобильной машины параметрами, что затрудняет использование этой зависимости.
За прототип настоящего изобретения принят способ (патент Российской Федерации RU №219129, С2, кл. В22/D 9/04, 2002 г.) изменения направления движения колесного транспортного средства, в котором устанавливается связь между углом поворота и углом наклона плоскостей управляемых колес, чего недостаточно для обеспечения полного безуводного режима качения, т.к. при этом неуправляемые колеса катятся с уводом, тем более, что в этом случае создаются условия наступления опасности избыточной поворачиваемости мобильной машины ввиду отсутствия увода шин передних колес и любого даже самого незначительного увода неуправляемых колес.
Технический результат в заявленном изобретении заключается в том, что в нем обеспечивается безуводное качение помимо шин управляемых колес, но и неуправляемых колес за счет наклона их плоскостей: внутреннего колеса по отношению к центру поворота на угол γв и наружного γн в зависимости от углов поворота управляемых колес: внутреннего на угол αв и наружного колеса на угол αн.
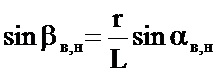
При этом если углы наклона плоскостей управляемых колес βв и βн определяется по формуле
где r - радиус колеса;
L - база автомобиля,
то углы наклона неуправляемых колес γв, γн подчиняются зависимости:
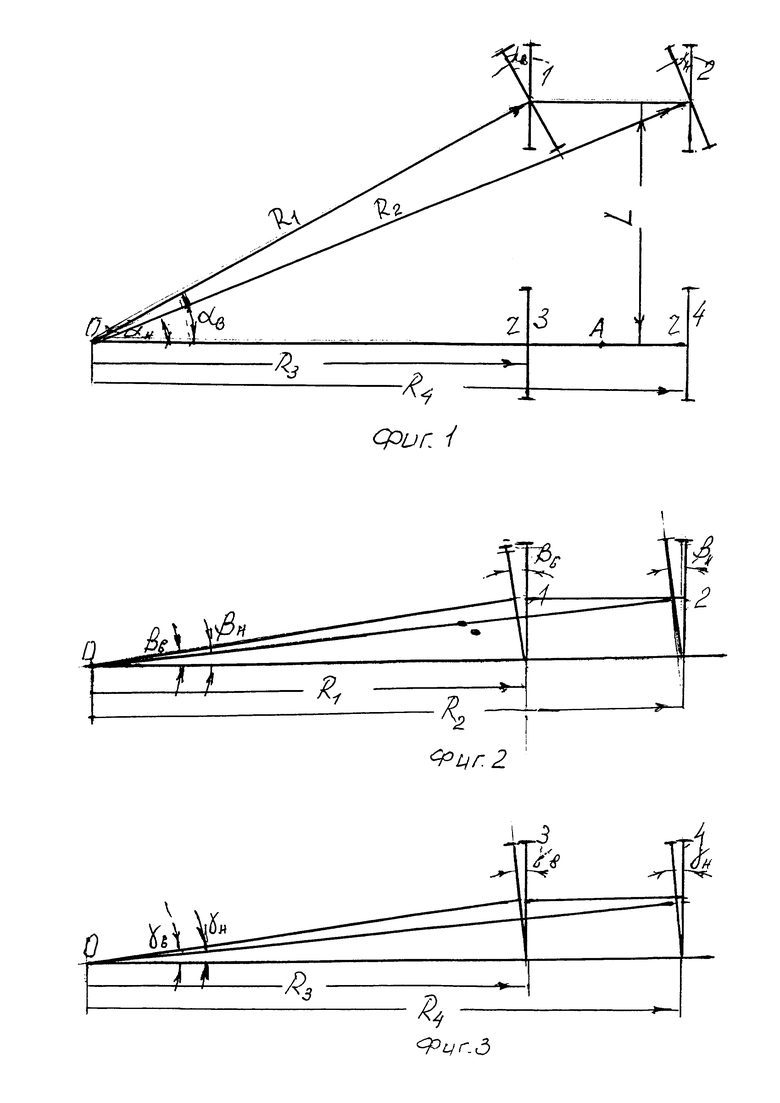
На фиг. 1 дан вид в плане схемы двухосной машины с двумя передними управляемыми 1 и 2 и двумя задними неуправляемыми 3 и 4 колесами с полюсом управления А, расположенным на неуправляемой оси.
На фиг. 2 приведено схематическое изображение в поперечной плоскости управляемых внутреннего 1 и наружного 2 колес передней оси, которые совершают вокруг точки О радиусами Rв, Rн и имеют наклон к центру поворота соответственно на углы βв, βн.
На фиг. 3 дано схематическое изображение в поперечной плоскости неуправляемой оси с колесами 3 и 4.
Способ поворота машины реализуется следующим образом. При повороте машины, если каждое управляемое колесо 1 и 2 поворачивают на углы αв, αн, то каждое неуправляемое заднее колесо 3 и 4, расположенное на неуправляемой оси, проходящей через полюс рулевого управления А, остается в исходном положении до начала поворота и для того, чтобы обеспечить чистое без увода качение машины, колеса должны претерпеть наклон на углы γв и γн, как это показано на фиг. 3, определяемые по уравнению:
Подставив вместо Rв,н его значение, взятое из соотношения, которое определяется на основании анализа фиг. 1
L/Rв,н=tgαв,н,
получим
В итоге имеем зависимости углов наклона плоскостей передних управляемых колес βв и βн, а также плоскостей каждого из неуправляемых задних колес на углы γв и γн в зависимости от углов поворота управляемых колес на те же углы αв и αн, определяемые формулами:
Реализация приведенных выше зависимостей позволит поднять на более высокий качественный уровень эксплуатационные свойства современной автотракторной техники, как по энергозатратам, так и износу шин, а также повысить устойчивость автомобиля, не ограничивая ее критической скоростью при движении по криволинейной траектории, которая является постоянной составляющей, особенно городских маршрутов.
Как показывают испытания в НАМИ и на Автополигоне, качение шин при наличии увода увеличивает более чем в три раза износ шин и существенно влияет на расход топлива, что убедительно доказывает полезность реализации предлагаемого способа поворота колесных безрельсовых мобильных машин.
Изобретение относится к области транспортного машиностроения. Способ поворота колесных безрельсовых мобильных машин заключается в том, что при движении по криволинейной траектории каждое управляемое колесо поворачивают в горизонтальной плоскости и одновременно наклоняют к центру поворота. Неуправляемые колеса также совершают наклон своих плоскостей в сторону центра поворота. Достигается безуводное качение шин управляемых и неуправляемых колес. 3 ил.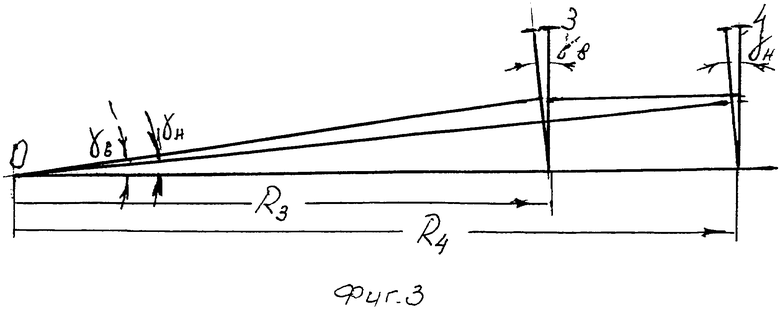
Способ поворота колесных безрельсовых мобильных машин, заключающийся в том, что при движении по криволинейной траектории каждое управляемое колесо поворачивают в горизонтальной плоскости на углы αв, αн и одновременно наклоняют к центру поворота на углы βв и βн в соответствии с существующей аналитической зависимостью:
отличающийся тем, что неуправляемые колеса также совершают наклон своих плоскостей в сторону центра поворота в соответствии с зависимостью:
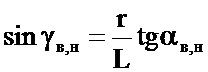
где γв,н - углы поворота внутреннего и наружного управляемых колес;
r - радиус колеса;
βв,н - углы наклона к центру поворота управляемых колес;
αв,н - углы наклона к центру поворота неуправляемых колес;
L - база автомобиля.
| СПОСОБ ПОВОРОТА МНОГООПОРНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2309868C1 |
| СПОСОБ ПОВОРОТА КОЛЕСНЫХ БЕЗРЕЛЬСОВЫХ МОБИЛЬНЫХ МАШИН | 2000 |
|
RU2191129C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТНЫМИ КОЛЕСАМИ НАЗЕМНОГО БЕЗРЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2320512C1 |
| WO 2003059720 A1, 24.07.2003 | |||
| US 9283989 B2, 15.03.2016. | |||

