Изобретение относится к области транспортного машиностроения, точнее к конструкции самоходных безрельсовых транспортных средств различного назначения с расположенными по ромбической схеме, по меньшей мере, четырьмя опорными колесами.
Известны транспортные средства с четырьмя опорными колесами, расположенными по ромбической схеме, в которых два колеса: переднее и заднее являются центральными и расположены последовательно друг за другом вдоль продольной оси транспортного средства (ТС), а два других - боковых - расположены по оси, перпендикулярной этой продольной оси, в которых движение по криволинейной траектории при поворотах обеспечивается за счет приложения крутящего момента к боковому колесу, идущему по внешней стороне (RU 2397908 C1, 2010 г.), или управляемым поворотом центральных колес (ЕР 1982905 А1, 2008 г.; GB 1171290, 1969 г. и GB 2332406 А1, 1999 г.). Этим аналогам присущ общий недостаток - отсутствие задаваемого поперечного крена несущего элемента при поворотах ТС.
Известен автомобиль, содержащий четыре колеса, расположенные по ромбической схеме, в котором два центральных колеса, переднее и заднее, являются постоянно опорными, а два боковых колеса в зависимости от условий движения периодически приводятся либо в активное, либо в нерабочее положение, что позволяет использовать боковые колеса для выравнивания рамы автомобиля после ее крена, осуществляемого на поворотах по типу мотоцикла на двух колесах (FR 2786749 A1, 2000 г.). В нем благодаря выполнению боковых колес, поднимающимися над опорной поверхностью, обеспечивается возможность использования синтеза лучших качеств поведения двухколесного и четырехколесного автомобиля, однако из-за движения в штатном режиме, в основном, по одноколейной схеме в общем такое ТС не обладает достаточной устойчивостью, особенно на больших скоростях (когда вспомогательные колеса убраны), наезде на препятствие, либо при движении по опорной поверхности с низким коэффициентом сцепления. К тому же поперечный крен рамы в нем осуществляется по углу поворота управляемого колеса без учета каких-либо других параметров, обуславливающих величину крена.
Известно также ТС, например по патенту US 4313511, 1982 г., содержащее раму с расположенными по ромбической схеме четырьмя колесами, два из которых расположены в центральной продольной плоскости, а два других - в поперечной плоскости вне центра масс ТС. Переднее либо заднее колеса вместе с двумя боковыми выполнены синхронно поворотными. Причем боковые колеса установлены на раме посредством пространственных рычажных систем, обеспечивающих этим колесам возможность дополнительных перемещений для предотвращения излишнего крена рамы и, как следствия, опрокидывания ТС на поворотах: при левом повороте поднимается левое боковое колесо, а при правом - правое. В этом аналоге параметры поперечного крена задаются углом поворота управляемых колес, в т.ч. и боковых, но сам процесс крена следует отнести к пассивным, не имеющим превентивно определяемых и задаваемых параметров, что является основным недостатком такого ТС, поскольку раз параметр крена зависит только от угла поворота колес, то при выбранном угле поворота в случае увеличения скорости появляется дополнительная, не учитываемая, величина центробежной силы, которая может привести к опрокидыванию ТС. К тому же осуществляемый при повороте поперечный крен несущего элемента (рамы) при одновременно повернутых боковых колесах может стать причиной, так называемой, избыточной поворачиваемости ТС, вводящей его в спираль, а из-за предусмотренной рычажной системы подъема боковых колес их пятно контакта будет смещаться относительно центра масс ТС, что будет приводить к появлению момента закручивания ТС относительно вертикальной оси и, как следствие, к развороту ТС и потере устойчивости на криволинейной траектории.
Наиболее близким аналогом (прототипом) изобретения является ТС с четырьмя размещенными по ромбической схеме опорными колесами, в котором устранены недостатки предыдущих аналогов благодаря обеспечению при криволинейной траектории движения на поворотах задаваемого поперечного крена несущего элемента - кузова или рамы - посредством имеющегося в нем соответствующего исполнительного механизма (RU 2156203 С2, 2000 г. - в варианте исполнения для движения с опорой на четыре колеса, включая боковые - лист 3 описания п.7 отличий и лист 4 строки 20-22 снизу).
В прототипе основные переднее и заднее колеса расположены по центру транспортного средства в плоскости его продольной оси и либо одно из них, либо оба являются ведущими, с приводом от двигателя, размещенного на несущей раме, и переднее колесо выполнено управляемым (поворотным). Вспомогательные убираемые боковые колеса- левое и правое - расположены в плоскости центра масс несущей рамы, по оси, перпендикулярной продольной оси. В нем предусмотрены узлы для установки колес на раме и для управления поворотным колесом, а также имеется исполнительный механизм обеспечения требуемого поперечного крена рамы (несущего элемента) при поворотах ТС, выполненный в виде размещенного в плоскости общего центра масс ТС балансировочного груза (БГ).
К недостаткам прототипа следует отнести сниженную устойчивость ТС как при движении на поворотах, так и при прямолинейном движении из-за выполнения боковых колес вспомогательными, не постоянно опорными, а лишь при медленном движении и стоянке; и из-за используемого исполнительного механизма обеспечения поперечного крена рамы, управляемого водителем вручную, по сути, эмпирически, что называется, «на глаз». Выполнение исполнительного механизма крена в виде БГ (перемещаемой утяжеленной шарнирно закрепленной на раме плиты) провоцирует проявление отрицательных свойств в конструктивном решении ТС и управлении им, поскольку, во-первых, сам по себе БГ должен иметь величину, соразмерную с массой ТС, следовательно, такой механизм крена не пригоден для использования даже в относительно габаритных ТС, а, во-вторых, создает дополнительные трудности в вождении ТС, отвлекая внимание водителя от дорожной ситуации, и к тому же эффективность его работы зависит от степени точности соблюдения параметров перемещения и возврата в исходное положение плиты (в противном случае в ТС будут возникать тенденции к опрокидыванию в ту или иную сторону), что требует достаточно высокого уровня квалификации и опыта водителя, управляющего таким ТС. К тому же скоростное движение ТС по велосипедной - двухколесной - схеме (с убранными боковыми колесами) может явиться причиной неустойчивости ТС при прямолинейном движении, особенно в условиях сниженной сцепляемости с опорной поверхностью, например по скользкой дороге в процессе торможения, либо интенсивного разгона, или при возникновении какой-либо экстраординарной ситуации, например наезде на неровность и т.д.
Задача, реализуемая изобретением, направлена на создание ТС, обладающего повышенной безопасностью при движении как по прямой, так и на участках с криволинейной траекторией, и независимо от состояния опорной поверхности.
Технический результат изобретения заключается в повышении устойчивости ТС против опрокидывания на поворотах путем обеспечения четкого управления задаваемым на поворотах креном несущего элемента ТС при повышении точности задания параметров крена и конструктивном упрощении исполнительного механизма крена.
Для достижения технического результата в транспортном средстве с четырьмя опорными колесами, размещенными по ромбической схеме на его несущем элементе, в котором переднее и заднее колеса расположены по центру транспортного средства в плоскости его продольной оси и, по меньшей мере, одно из них, например переднее, выполнено поворотным, а боковые колеса: левое и правое расположены в плоскости центра масс несущего элемента по оси, перпендикулярной упомянутой продольной оси, содержащем узлы для установки колес на несущем элементе и для управления поворотными колесами, а также привод ведущих колес: переднего и/или заднего и исполнительный механизм обеспечения задаваемого на поворотах поперечного крена несущего элемента, согласно изобретению имеется управляющая система, снабженная средствами задания и контроля (отслеживания) величины и направления поперечного крена несущего элемента, боковые колеса выполнены ведомыми, постоянно контактирующими с опорной поверхностью, установлены на несущем элементе с возможностью выдвижения перпендикулярно оси их вращения в направлении опорной поверхности посредством подключенного к управляющей системе регулируемого приводного узла, и в совокупности с этим приводным узлом выполняют функцию механизма обеспечения задаваемого поперечного крена несущего элемента таким образом, что крен осуществляется в сторону центра поворота на угол  , определяемый по условиям движения при повороте. Дополнительные отличия состоят в том, что в предлагаемом ТС:
, определяемый по условиям движения при повороте. Дополнительные отличия состоят в том, что в предлагаемом ТС:
- угол крена  устанавливается управляющей системой по соотношению
устанавливается управляющей системой по соотношению 
где V - скорость движения ТС в км/ч, r - радиус поворота ТС;
- несущим элементом является его кузов или рама кузова, либо шасси;
- приводной узел выдвижения выполнен в виде двух гидро-пневмоцилиндров, подключенных к общей замкнутой линии питания, содержащей управляемое золотниковое устройство, которое поддерживает в цилиндрах уравновешенное рабочее давление при прямолинейном движении транспортного средства, а при его движении на поворотах обеспечивает перераспределение рабочего давления из цилиндра, расположенного с внутренней стороны по отношению к центру поворота, в цилиндр, расположенный с наружной стороны поворота, для приложения к несущему элементу требуемого крена;
- боковые колеса установлены на несущем элементе посредством двух независимых управляемых гидро-пневмоподвесок, являющихся цилиндрами приводного узла выдвижения;
- приводной узел выдвижения каждого бокового колеса может быть выполнен также в виде связанного с ним шестеренчато-реечного механизма, снабженного электромотором, подключенным к управляющей системе.
Выполнением всех колес ТС, включая боковые, опорными, с одинаковыми параметрами, имеющими постоянное сцепление с дорогой не только на стоянке, но и при всех режимах движения, в сочетании с установкой боковых колес на несущем элементе с возможностью выдвижения перпендикулярно оси их вращения в направлении опорной поверхности от подключенного к управляющей системе регулируемого приводного узла обеспечивает повышенную устойчивость ТС и при прямолинейном движении, и, что особенно важно, при его движении на поворотах независимо от скорости движения и высоты центра масс ТС, а также в меньшей степени зависимости от состояния опорной поверхности движения.
Выполнение боковых колес выдвижными в направлении дорожной поверхности позволяет задействовать эти колеса в качестве составляющих элементов исполнения требуемого крена несущего элемента ТС с заданными по величине и направлению параметрами, устанавливаемым управляющей системой по условиям движения на поворотах по определенному соотношению параметров движения с учетом отслеживаемого параметра центробежной силы.
Использование боковых колес, а в отдельных частных случаях исполнения ТС и их подвесок, в качестве составных исполнительных элементов, непосредственно обеспечивающих поперечный крен несущего элемента, приводит не только к значительному конструктивному упрощению кинематики ТС, но и способствует достижению с помощью управляющей системы более четкого и корректного (чем в прототипе и рассмотренных аналогах) задания и обеспечения крена, что является важным условием повышения устойчивости ТС при упрощении управления таким ТС.
На представленных чертежах: на фиг.1 дан общий вид ТС (пример);
на фиг.2 - то же, вид сверху; на фиг.3 - схема поперечного крена кузова; на фиг.4 - схема управления поперечным креном (пример); на фиг.5 - схема действия на центр масс ТС сил, возникающих при его повороте.
На несущем элементе 1 ТС: кузове, раме кузова или шасси установлены центральные колеса: переднее 2 и заднее 3 и боковые колеса: левое 4 (по ходу движения) и правое 5. Колеса 2 и 3 расположены по центру транспортного средства в плоскости его продольной оси 6, а колеса 4 и 5 - в плоскости центра масс несущего элемента по оси 7, перпендикулярной оси 6. Все колеса, включая боковые, выполнены постоянноопорными (не убираемыми) с одинаковыми параметрами и при этом ведущими и управляемыми (поворотными) являются переднее 2 и/или заднее 3 колеса в любой целесообразной комбинации, а боковые колеса 4 и 5 - ведомыми.
ТС содержит привод ведущих колес, узел поворота управляемого колеса (колес) и соответствующие узлы для установки колес на несущем элементе 1, выполненные любым изестным образом, например в виде независимых управляемых упругих подвесок; - перечисленные узлы из-за их традиционного конструктивного исполнения на прилагаемых чертежах условно не показаны.
Для обеспечения при движении ТС по криволинейной траектории (на поворотах) поперечного крена несущего элемента 1 предназначен подключенный к управляющей системе 8 исполнительный механизм, функции которого в предлагаемом ТС выполняют боковые колеса 4 и 5 и приводной узел 9, например в виде двух гидро-пневмоцилиндров 10 и 11, подключенных к общей замкнутой линии питания 12, содержащей управляемое золотниковое устройство 13, которое поддерживает в цилиндрах уравновешенное рабочее давление при прямолинейном движении транспортного средства, а при его криволинейном движении для приложения к несущему элементу 1 требуемого крена в сторону центра поворота обеспечивает перераспределение рабочего давления из цилиндра, расположенного с внутренней стороны по отношению к центру поворота, в цилиндр, расположенный с наружной стороны поворота. Узел 9 может быть выполнен и любым другим целесообразным образом, продиктованным особенностями назначения и конкретного конструктивного исполнения ТС. Так, для легкового автомобиля узел 9 может быть выполнен в виде двух независимых управляемых гидро-пневмоподвесок, с помощью которых боковые колеса 4 и 5 установлены на несущем элементе 1 и которые при этом являются цилиндрами 10 и 11 в узле 9.
Как вариант, приводной узел 9 может быть выполнен в виде двух шестеренчато-реечных механизмов, в которых каждая из реек связана одним концом с соответствующим ей по расположению боковым колесом, а другим - с шестерней, имеющей вал с приводом от электродвигателя, подключенного к управляющей системе.
Управляющая система 8, связанная, например, с бортовым компьютером (не показан), содержит в качестве средств для задания и контроля (отслеживания) величины и направления поперечного крена несущего элемента 1, например в конкретном исполнении ТС это может быть, соответственно, акселерометр 14, предназначенный для отслеживания величины центростремительного ускорения, которое является определяющим величину действующей при повороте центробежной силы.
Пояснение работы ТС дано на конкретном примере его исполнения, в виде легкового автомобиля (фиг.1), кузов которого является несущим, и колеса установлены на кузове в порядке, описанном выше, при этом боковые колеса 4 и 5 установлены с помощью управляемых гидроподвесок, переднее колесо - с помощью подвески в виде мотоциклетной вилки, а заднее колесо - посредством пружины и гидроамортизатора. Поворотным является переднее колесо 2, заднее колесо 3 - ведущим. Приводной узел 9 выполнен в соответствии с п.4 формулы изобретения, и гидроподвески боковых колес выполняют в нем роль цилиндров 10 и 11.
При прямолинейном движении ТС каждое из колес 2-5 несет одинаковую нагрузку, а рабочее давление в цилиндрах 10 и 11 приводного узла 9 уравновешено. При повороте ТС, например вправо по ходу движения, траектория которого задается поворотом переднего колеса 2, крен несущего элемента 1, требуемый для уравновешивания момента центробежной силы, осуществляется боковыми колесами 4 и 5 следующим образом. По сигналу от акселерометра 14, отслеживающему величину центростремительного ускорения, управляющей системой устанавливаются соответствующий ему параметр центробежной силы, требуемое направление и угол крена α и подается соответствующая команда на золотниковое устройство 13, которым создается перераспределение в цилиндрах 10 и 11 на величину, соответствующую углу крена и требуемой для обеспечения величины выдвижения левого бокового колеса, т.е. со стороны правого бокового колеса 5 в цилиндре 11 давление уменьшится и в цилиндре 10 со стороны колеса 4 увеличится, выдвигая это колесо перпендикулярно оси его вращения в сторону опорной поверхности, чем и обеспечивается крен в сторону центра поворота, в рассматриваемом случае - вправо. По окончании поворота командой от системы 8 золотниковое устройство 13 снова уравновешивает рабочее давление в цилиндрах 10 и 11.
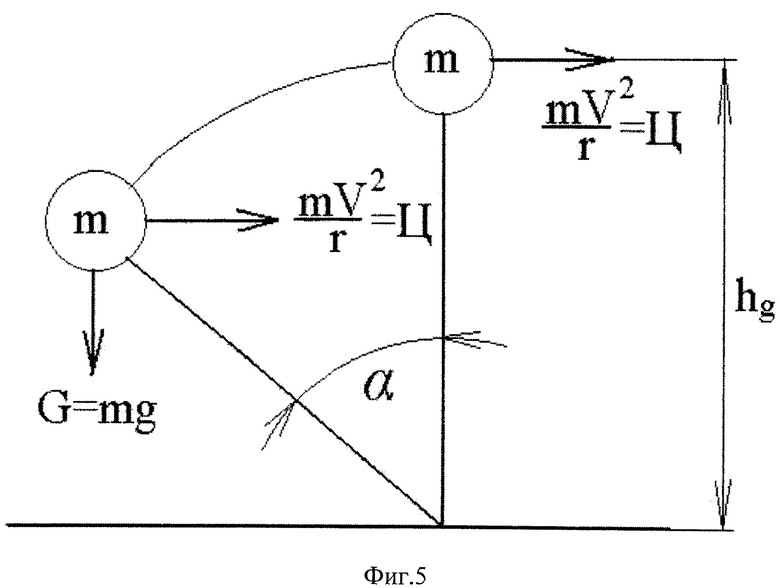
На фиг.5 показана схема действия сил на центр масс ТС, возникающих при его повороте с заданными скоростью поворота и радиусом поворота, где:
α - угол крена;
hg - высота центра масс ТС;
m - масса ТС;
V - скорость движения ТС в км/ч;
r - радиус поворота ТС;
Ц - центробежная сила;
g - ускорение свободного падения;
G - сила веса ТС.
Уравнение равновесия центра масс ТС при повороте имеет вид:
или после сокращения параметров массы и высоты центра масс и деления обеих частей на cos α:
откуда угол крена будет иметь выражение
или
Из этого соотношения видно, что устойчивость ТС при движении на повороте при задании соответствующего крена не зависит ни от массы, ни, что очень важно, от высоты центра масс, что особенно ценно, т.к. именно высота центра масс является главным отрицательным фактором, влияющим на устойчивость ТС обычной (не ромбической) четырехколесной конструкции.
Например, в приведенном примере осуществления изобретения
при V=30 км/ч и r=15М угол 
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГОВЫЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2365519C1 |
| Способ поворота, обеспечивающий безуводный режим качения шин двухосной мобильной машины | 2017 |
|
RU2656983C1 |
| СПОСОБ ПОВОРОТА КОЛЕСНЫХ БЕЗРЕЛЬСОВЫХ МОБИЛЬНЫХ МАШИН | 2000 |
|
RU2191129C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТНЫМИ КОЛЕСАМИ НАЗЕМНОГО БЕЗРЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2320512C1 |
| ЗАЩИТНЫЙ ЭКРАН ПРОТИВ ПРОКАЛЫВАНИЯ ПНЕВМАТИЧЕСКИХ ШИН | 2022 |
|
RU2804435C1 |
| Способ определения вертикальной координаты центра масс транспортного средства относительно опорной горизонтальной поверхности | 1990 |
|
SU1721461A1 |
| Всесезонный тундроход | 2016 |
|
RU2628414C1 |
| Конструкция колеса с пневматической шиной для работы на мобильной машине с большим развалом | 2019 |
|
RU2749143C1 |
| Обод колеса для шин регулируемого давления воздуха | 2020 |
|
RU2764933C1 |
| ВСЕСЕЗОННАЯ ПНЕВМАТИЧЕСКАЯ ШИНА АВТОМОБИЛЬНОГО КОЛЕСА | 2014 |
|
RU2564790C1 |
Изобретение относится к области транспортного машиностроения. Транспортное средство содержит четыре опорных колеса, размещенных по ромбической схеме на его несущем элементе. Переднее и заднее колеса расположены по центру транспортного средства в плоскости его продольной оси и одно из них выполнено поворотным. Боковые колеса: левое и правое расположены в плоскости центра масс несущего элемента по оси, перпендикулярной продольной оси. Транспортное средство содержит узлы для установки колес на несущем элементе и для управления поворотными колесами, а также привод переднего и/или заднего ведущих колес и исполнительный механизм обеспечения задаваемого на поворотах поперечного крена несущего элемента. В транспортном средстве имеется управляющая система, снабженная средствами задания и контроля (отслеживания) величины и направления поперечного крена несущего элемента. Боковые колеса выполнены ведомыми, постоянно контактирующими с опорной поверхностью, и установлены на несущем элементе с возможностью выдвижения перпендикулярно оси их вращения в направлении опорной поверхности посредством подключенного к управляющей системе регулируемого приводного узла. Боковые колеса в совокупности с приводным узлом выполняют функцию механизма обеспечения задаваемого поперечного крена несущего элемента таким образом, что крен осуществляется в сторону центра поворота на угол α, определяемый по условиям движения при повороте. Достигается повышение устойчивости транспортного средства. 6 з.п. ф-лы, 5 ил.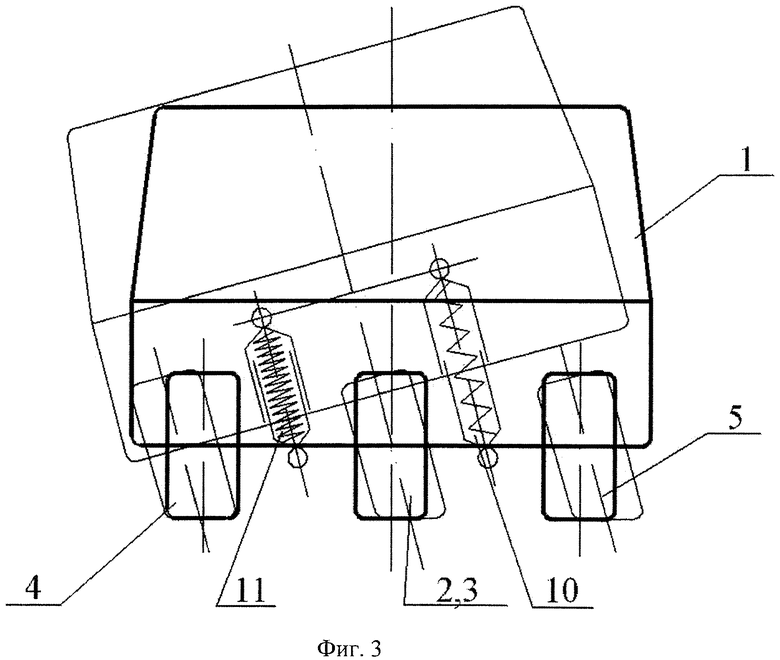
1. Транспортное средство с четырьмя опорными колесами, размещенными по ромбической схеме на его несущем элементе, в котором переднее и заднее колеса расположены по центру транспортного средства в плоскости его продольной оси и, по меньшей мере, одно из них, например переднее, выполнено поворотным, а боковые колеса: левое и правое расположены в плоскости центра масс несущего элемента по оси, перпендикулярной упомянутой продольной оси, содержащее узлы для установки колес на несущем элементе и для управления поворотными колесами, а также привод ведущих колес: переднего и/или заднего, и исполнительный механизм обеспечения задаваемого на поворотах поперечного крена несущего элемента, отличающееся тем, что в нем имеется управляющая система, снабженная средствами задания и контроля (отслеживания) величины и направления поперечного крена несущего элемента, боковые колеса выполнены ведомыми, постоянно контактирующими с опорной поверхностью, установлены на несущем элементе с возможностью выдвижения перпендикулярно оси их вращения в направлении опорной поверхности посредством подключенного к управляющей системе регулируемого приводного узла, и в совокупности с этим приводным узлом выполняют функцию механизма обеспечения задаваемого поперечного крена несущего элемента таким образом, что крен осуществляется в сторону центра поворота на угол α, определяемый по условиям движения при повороте.
2. Транспортное средство по п.1, отличающееся тем, что угол крена α устанавливается управляющей системой по соотношению
где V - скорость движения ТС, км/ч;
r - радиус поворота ТС.
3. Транспортное средство по п.1, отличающееся тем, что приводной узел выдвижения выполнен в виде двух гидропневмоцилиндров, подключенных к общей замкнутой линии питания, содержащей управляемое золотниковое устройство, которое поддерживает в цилиндрах уравновешенное рабочее давление при прямолинейном движении транспортного средства, а при его движении на поворотах обеспечивает перераспределение рабочего давления из цилиндра, расположенного с внутренней стороны по отношению к центру поворота, в цилиндр, расположенный с наружной стороны поворота, для приложения к несущему элементу требуемого крена.
4. Транспортное средство по любому из пп.1-3, отличающееся тем, что боковые колеса установлены на несущем элементе посредством двух независимых управляемых гидропневмоподвесок, являющихся цилиндрами приводного узла выдвижения.
5. Транспортное средство по п.1, отличающееся тем, что приводной узел выдвижения каждого бокового колеса выполнен в виде связанного с ним шестеренчато-реечного механизма, снабженного электромотором, подключенным к управляющей системе.
6. Транспортное средство по п.1, отличающееся тем, что несущим элементом является его кузов.
7. Транспортное средство по п.1, отличающееся тем, что в нем несущим элементом является рама кузова или шасси.
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1998 |
|
RU2156203C2 |
| Моторная повозка | 1932 |
|
SU32310A1 |
| Устройство для контроля параметров | 1977 |
|
SU714360A1 |
| ЭЛЕКТРОЛИТ ДЛЯ ОСАЖДЕНИЯ СПЛАВА МЕДЬ - ИНДИЙ | 1988 |
|
SU1568581A1 |

