(Л
С

| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель метеорологической дальности видимости | 1990 |
|
SU1784843A1 |
| Способ измерения параметров колебательных контуров | 1989 |
|
SU1651235A1 |
| Способ преобразования частоты следования импульсов в код | 1974 |
|
SU528701A1 |
| Система регулирования объектов высокого порядка с запаздыванием | 1989 |
|
SU1667002A1 |
| Способ преобразования временного сдвига между двумя сигналами и устройство для его осуществления | 1989 |
|
SU1723560A1 |
| СПОСОБ ИЗМЕРЕНИЯ СРЕДНЕГО ЗНАЧЕНИЯ НАПРЯЖЕНИЯ ПРОИЗВОЛЬНОЙ ФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2034302C1 |
| Цифровой измеритель температуры | 1988 |
|
SU1583757A1 |
| Устройство для измерения сопротивления | 1988 |
|
SU1649468A1 |
| Способ контроля работоспособности ленточного конвейера и устройство для его осуществления | 1988 |
|
SU1555240A1 |
| Устройство для измерения ортогональных составляющих сигнала | 1987 |
|
SU1465809A1 |
Изобретение относится к контрольно-, измерительной технике и предназначено для измерения параметров последовательных и параллельных колебательных контуров. Цель изобретения - повышение точности преобразования путем уменьшения количества операций над выходным сигналом измерительного блока и устранения дифференцирования и двойного дифференцирования. Способ состоит в воздействии на измерительный блок сигналом и интегрировании его выходного сигнала со ступенчато-изменяющимися коэффициентами на заданном интервале времени. Выходной сигнал измерительного блока можно интегрировать с переменными знаками на заданном интервале времени. 1 з п. ф-лы. 1 табл., 2 ил.
Изобретение относится к контрольно- измерительной технике и предназначено для измерения параметров параллельных и последовательных контуров.
Известен способ измерения параметров нерезонансных пассивных трехэлементных двухполюсников, заключающийся в преобразовании параметров двухполюсника в активную величину и последовательном осуществлении двух состояний квазиравновесия путем изменения частоты питающего напряжения и последующем умножении и делении промежуточных величин,
Однако данный способ обладает низким быстродействием и сложностью, что связано с необходимостью осуществления двух состояний квазиравновесия.
Известен также способ измерения параметров колебательных контуров, заключающийся в воздействии на измерительный
блок одновременно ступенчатым, линейно изменяющимся и параболическим напряжениями с определенными весовыми коэффициентами, причем значения весовых коэффициентов устанавливают перед измерением каждого из параметров, а значение измеряемого параметра определяют по мгновенным значениям выходной реакции измерительного блока в выбранный момент времени.
Недостатками данного способа являются низкая точность, обусловленная необходимостью измерения мгновенных значений, и низкое быстродействие, связанное с необходимостью изменения коэффициентов при измерении различных параметров.
Наиболее близким к предлагаемому техническим решением является способ инвариантного преобразования параметров двухполюсных электрических цепей, осноVJ
hO
ел со ю
ванный на подаче на измерительный блок ступенчатого напряжения и последующей обработке выходного сигнала измерительного блока выполнением последовательных операций дифференцирования, интегриро- вания и вычитания выходного сигнала.
Недостатком известного способа является низкая точность. Обусловлено это тем, что над выходным сигналом измерительного блока выполняется большое количество аналоговых операций. Дифференцирование и двойное дифференцирование являются неустойчивыми операциями. При их осуществлении выделяются высокочастотные шумовые составляющие, которых могло даже не быть в спектре входного сигнала (шумы операционных усилителей). Это при- водит к увеличению случайной погрешности преобразования.
Целью изобретения является повыше- ние точности преобразования.
Поставленая цель достигается тем, что по способу преобразования параметров колебательных контуров, заключающемуся в воздействии опорным сигналом на измери- тельный блок и интегрировании его выходного сигнала, интегрирование осуществляется со ступенчато изменяющимися коэффициентами на заданном интервале времени.
Кроме того, выходной сигнал измерительного блока интегрируют с переменными знаками на заданном интервале времени.Преобразование параметров колеба- тельного контура осуществляется следую- щим образом.
На вход измерительного блока, состоящего из определенным образом включенных исследуемого колебательного контура, операционного.усилителя и опорного элемента, подают опорный сигнал, например линейно изменяющееся напряжение. Выходное напряжение измерительного блока интегрируют на определенном интервале времени. При этом интегрирование осуществляется с коэффициентами, значения которых ступенчато изменяются во время .интегрирования, или интегрирование происходит с изменением знака. Момент изме- нения знака -или коэффициентов и их значения задаются такими, что результат интегрирования пропорционален только одному параметру колебательного контура.
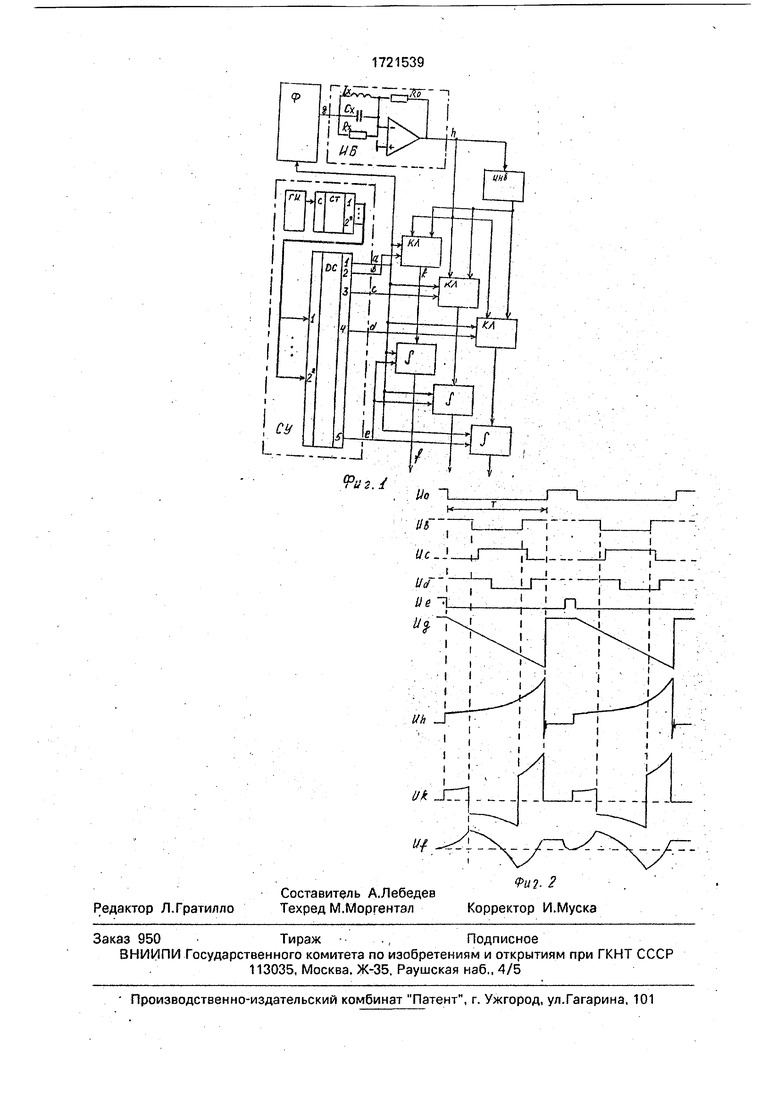
На фиг, 1 представлена схема устройст- ва для осуществления предлагаемого способа; на фиг. 2 - временные диаграммы, поясняющие его работу.
Устройство содержит формирователь линейно изменяющегося напряжения, измерительный блок, счетчик, генератор импульсов, четыре блока постоянной памяти, три цифроаналоговых преобразователя и три интегратора.
Выход формирователя линейно изменяющегося напряжения подключен к измерительному блоку, а вход формирователя соединен с вторым выходом четвертого блока постоянной памяти. Генератор импульсов подключен к входу счетчика, выходы которого соединены с входами блоков постоянной памяти. Выходы первого, второго и третьего блоков постоянной памяти соединены с цифровыми входами первого, второго и третьего цифроаналоговых преобразователей соответственно. Выходы цифроаналоговых преобразователей соединены с первыми входами интеграторов, вторые и третьи входы которых объединены и подключены соответственно к первому и второму выходам четвертого блока памяти.
Устройство позволяет преобразовывать в напряжение параметры параллельных и последовательных трех- и двухэлементных контуров.
Устройство работает следующим образом.
Под воздействием тактовых импульсов, поступающих с генератора импульсов, счетчик изменяет свое состояние. Выходной код счетчика является адресным для блоков постоянной памяти. Блок постоянной памяти запрограммирован так, что под воздействием изменяющегося кода адреса на его двух выходах формируются управляющие сигналы. Причем сигнал с второго выхода (Ua, фиг.2)задает время интегрирования Т, а сигнал с первого выхода (1)ь, фиг. 2) обнуляет интеграторы перед каждым новым циклом интегрирования. По сигналу с второго выхода блока постоянной памяти интеграторы переходят в режим интегрирования, а формирователем вырабатывается линейно изменяющееся напряжение (Uc, фиг. 2), реакция на которое измерительного блока имеет вид (, фиг. 2)
Ud (t) S Ro С + S Ro t/R + S Ro t2/2L, (1) где S - скорость изменения входного напряжения;L, С, R - параметры колебательного контура;
Ro - значение опорного сопротивления.
Выходной сигнал измерительного блока поступает на входы цифроаналоговых преобразователей, которыми в соответствии с программами, хранящимися в блоках постоянной памяти, осуществляется масштабное преобразование сигнала, причем значение коэффициента преобразования и его знак изменяются несколько раз за один
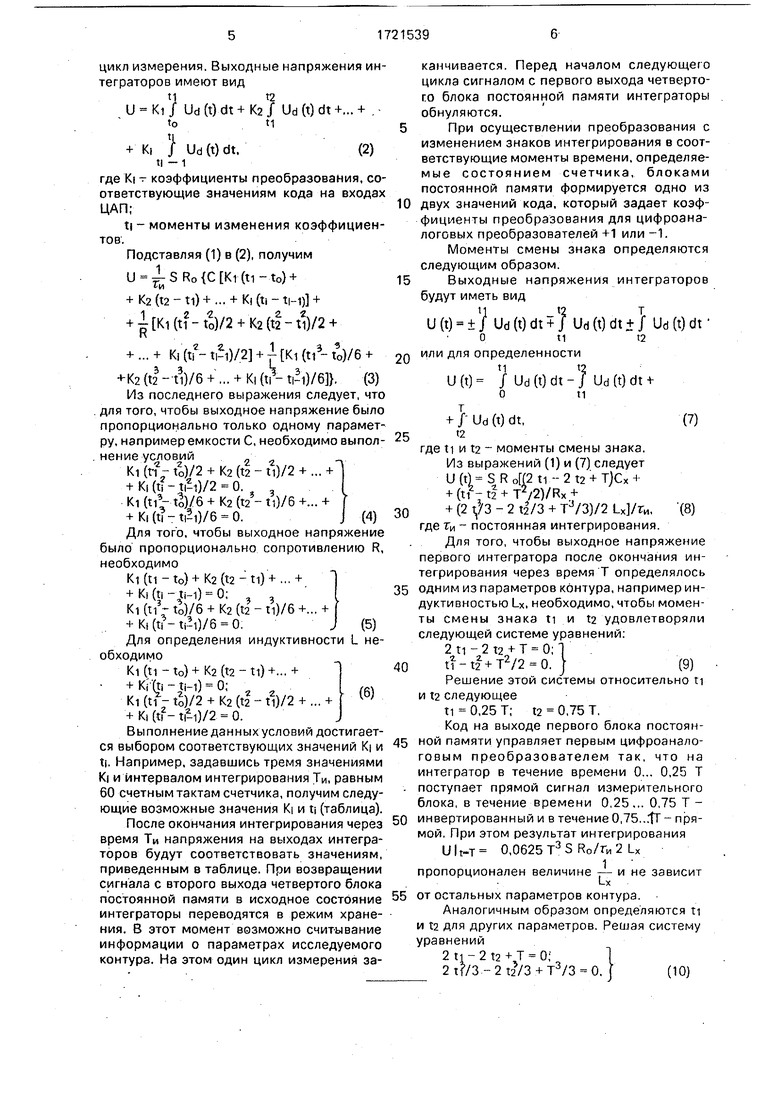
цикл измерения. Выходные напряжения интеграторов имеют вид
U - Ki J Ud (t) dt + K2 / Ud (t) dt +... + . - t0n
+ Ki / Ud (t) dt.(2)
ti - 1
где Ki - коэффициенты преобразования, соответствующие значениям кода на входах ЦАП;
ti - моменты изменения коэффициентов.
Подставляя (1) в (2), получим
U SRo{C Kr(ti-to) + + К2 (t2 - ti) + ... + Ki (ti - ti-i) +
+ (tiZ-fc)/2 + Mt2-tV2 + - к
+ ... + Ki ( tM)/2 +1 Ki (Ц3- to)/6 +
+K2 (t -tVe +... + KI (tl3- ti-i). (3)
Из последнего выражения следует, что для того, чтобы выходное напряжение было пропорционально только одному параметру, например емкости С, необходимо выполнение условий
Ki ()/2 + K2(t2-ti)/2 + ...+
+ )/2-0 ,
Ki (ti --tS)/6 + K2 fa - ti)/6 +... +
+ Ki(tiTtЈi)/6 0.J (4)
Для того, чтобы выходное напряжение
было пропорционально сопротивлению R,
необходимо
Ki (ti - to)+K2(t2-tl) +...+
+ Ki (ti - ti-i) 0; Ki()/6 + K2(ti-ti)/6+... + + Ki (ti - ti-i)/6 0:J (5)
Для определения индуктивности L необходимо
Kl(t1 -to)+ K2(t2-tl)+... +
+ Kr(ti - ti-i) 0;, (Q
Ki (ti - to)/2 + K2 (t - ti)/2 + ...+ w
+ Ki (ti - tЈi)/2 0.
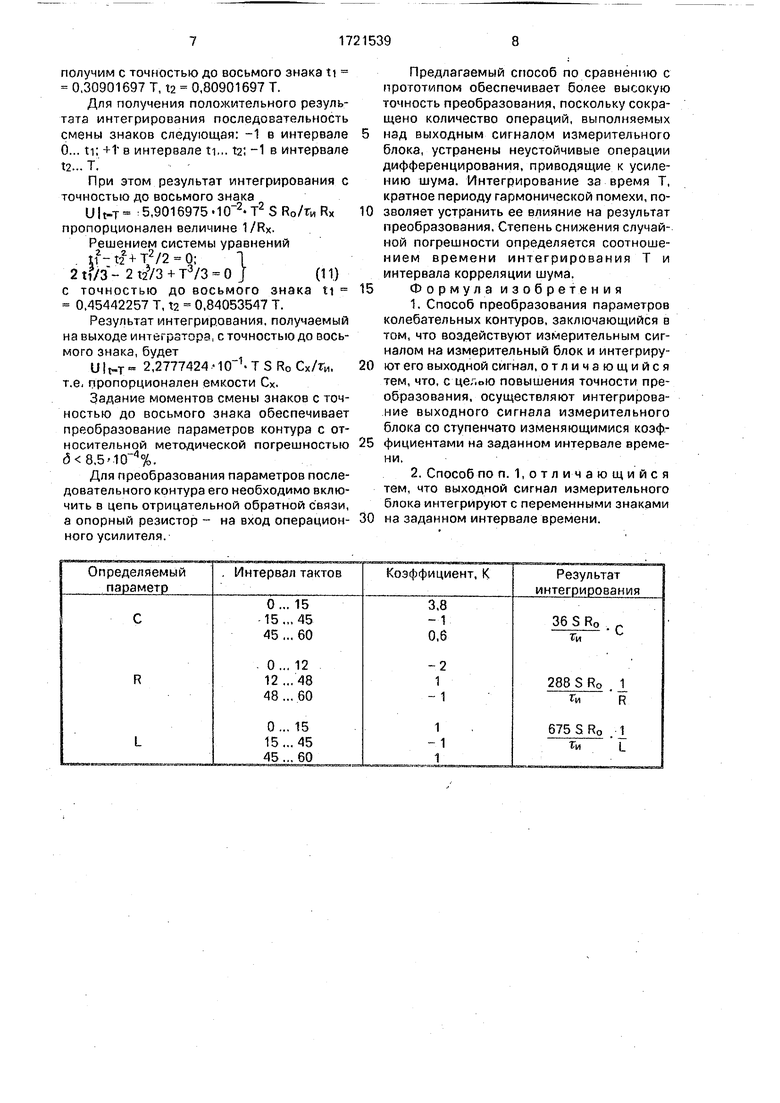
Выполнение данных условий достигается выбором соответствующих значений KI и ti. Например, задавшись тремя значениями Ki и интервалом интегрирования Ти, равным 60 счетным тактам счетчика, получим следующие возможные значения KI и ti (таблица).
После окончания интегрирования через время Ти напряжения на выходах интеграторов будут соответствовать значениям, приведенным в таблице. При возвращении сигнала с второго выхода четвертого блока постоянной памяти в исходное состояние интеграторы переводятся в режим хранения. В этот момент возможно считывание информации о параметрах исследуемого контура. На этом один цикл измерения заканчивается. Перед началом следующего цикла сигналом с первого выхода четвертого блока постоянной памяти интеграторы обнуляются.
5При осуществлении преобразования с
изменением знаков интегрирования в соответствующие моменты времени, определяе- мые состоянием счетчика, блоками постоянной памяти формируется одно из
0 двух значений кода, который задает коэффициенты преобразования для цифроана- логовых преобразователей +1 или -1.
Моменты смены знака определяются следующим образом.
5 Выходные напряжения интеграторов будут иметь вид
и(т)-±У Ud(t)dt + f Ud(t)dt + / Ud(t)df
О1112
Q или для определенности tit
U (t) / Ud (t) dt - J Ud (t) dt + оn
+ }-Ud(t)dt,(7)
5t2
где ti и t2 - моменты смены знака.
Из выражений (1) и (7) следует
U(t)SR0f(: + (tM+T
2 ti - 2 12 + Т)Сх + /2)/Rx
0+ (2 V/3 - 2 t|/3 + rV3)/2 . (8)
где ти - постоянная интегрирования.
Для того, чтобы выходное напряжение первого интегратора после окончания интегрирования через время Т определялось
5 одним из параметров контура, например индуктивностью LX, необходимо, чтобы моменты смены знака ti и t2 удовлетворяли следующей системе уравнений:
ci - 2 t2 + Т 0; Т -t2 + T2/2 0. )
Г
0 r/ U. J(9)
Решение этой системы относительно ti и t2 следующее
ti 0,25 T; t2 0,75 Т. Код на выходе первого блока постоян- 5 ной памяти управляет первым цифроанало- говым преобразователем так, что на интегратор в течение времени 0... 0,25 Т . поступает прямой сигнал измерительного блока, в течение времени 0,25... 0,75 Т - 0 инвертированный и в течение 0,75...1Т - прямой. При этом результат интегрирования 0,0625 Т3 S RO/ГИ 2 Lx
пропорционален величине -- и не зависит
Lx
5 от остальных параметров контура.
Аналогичным образом определяются ti и ta для других параметров. Решая систему уравнений
2 ti-2t2 + T 0;
2 - 2 t2/3 .+ Т3/3 0. f(10)
получим с точностью до восьмого знака ti 0,30901697 Т, t2 0,80901697 Т.
Для получения положительного результата интегрирования последовательность смены знаков следующая: -1 в интервале 0... ti; +1 в интервале ti... t2; -1 в интервале
При этом результат интегрирования с точностью до восьмого знака
U|t-T : 5,9016975 Т2 SRo/tviRx пропорционален величине 1/Rx.
Решением системы уравнений . tf-t22+T2/2 0-1
2 ti/3 - 2 t23/3 + Т3/3 О )(11}
с точностью до восьмого знака ti 0.45442257 Т, tz 0,84053547 Т.
Результат интегрирования, получаемый на выходе интегратора, с точностью до восьмого знака, будет
Ult-т 2,2777424-10 -Т SRoCx/tV,, т.е, пропорционален емкости Сх.
Задание моментов смены знаков с точностью до восьмого знака обеспечивает преобразование параметров контура с относительной методической погрешностью ,.
Для преобразования параметров последовательного контура его необходимо включить в цепь отрицательной обратной связи, а опорный резистор - на вход операционного усилителя.
5
0
5
0
Предлагаемый способ по сравнению с прототипом обеспечивает более высокую точность преобразования, поскольку сокращено количество операций, выполняемых над выходным сигналом измерительного блока, устранены неустойчивые операции дифференцирования, приводящие к усилению шума. Интегрирование за время Т, кратное периоду гармонической помехи, позволяет устранить ее влияние на результат преобразования. Степень снижения случайной погрешности определяется соотношением времени интегрирования Т и интервала корреляции шума.
Формул а изобретения
1,Способ преобразования параметров колебательных контуров, заключающийся в том, что воздействуют измерительным сигналом на измерительный блок и интегрируют его выходной сигнал, отличающийся тем, что, с цел о ю повышения точности преобразования, осуществляют интегрирование выходного сигнала измерительного блока со ступенчато изменяющимися коэффициентами на заданном интервале времени.
///
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НЕРЕЗОНАНСНЫХ ПАССИВНЫХ ТРЕХЭЛЕМЕНТНЫХ ДВУХПОЛЮСНИКОВ | 0 |
|
SU234508A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения параметров колебательных контуров | 1979 |
|
SU783709A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| БЫСТРОДЕЙСТВУЮЩЕЕ УСТРОЙСТВО ПОЭЛЕМЕНТНОГО ДОПУСКОВОГО КОНТРОЛЯ ПАРАМЕТРОВ СЛОЖНЫХ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ | 1972 |
|
SU421949A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
