Изобретение относится к деревообрабатывающей промышленности, а именно к оборудованию для производства лущеного шпона.
Целью изобретения является повышение точности работы устройства, его быстродействия и расширение его технологических возможностей.
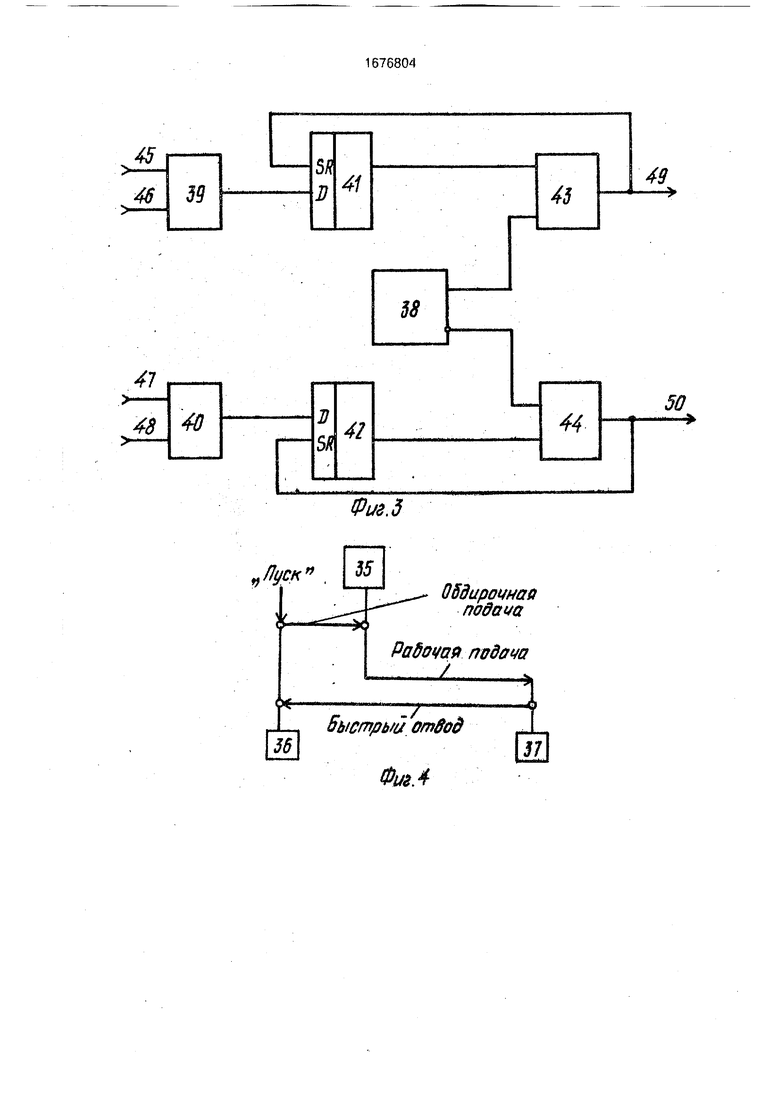
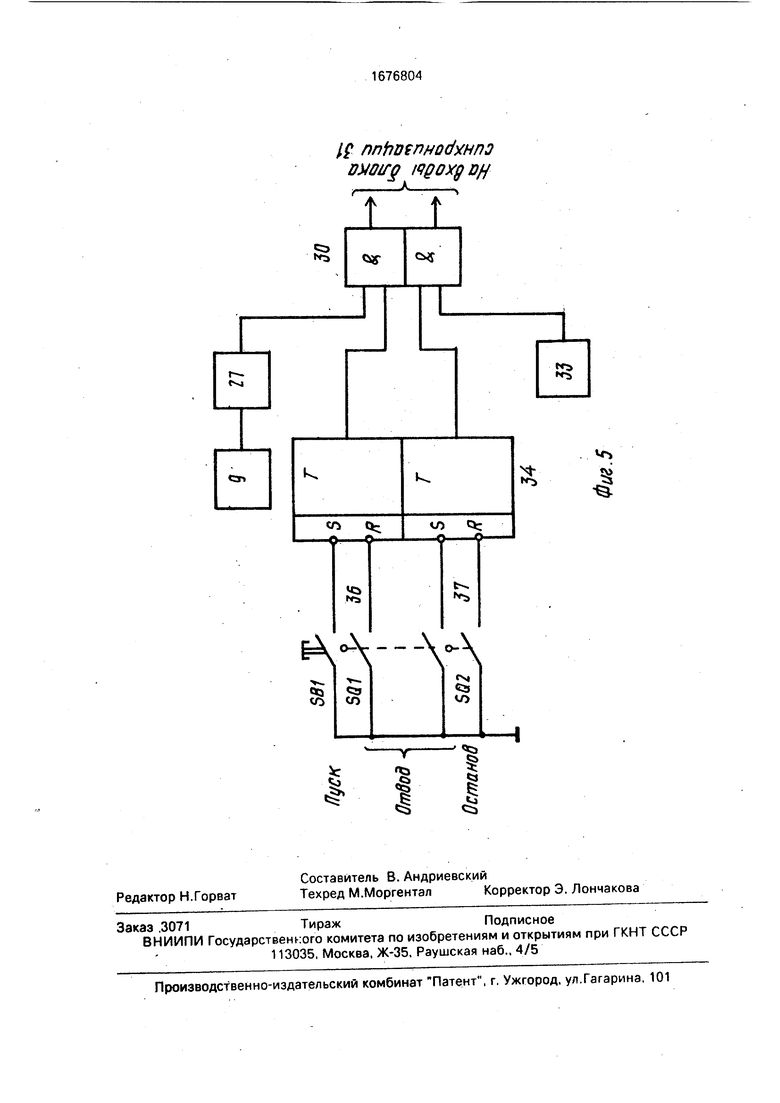
На фиг.1 изображена принципиальная гидрокинематическая схема предлагаемого устройства; на фиг.2 - структурная схема системы управления; на фиг.З - функциональная схема блока синхронизации импульсов; на фиг.4 - циклограмма работы механизма подачи; на фиг.5 - связь триггера с блоком синхронизации импульсов.
Разлущиваемый чурак 1 зажимается выдвижными телескопическими шпинделями 2 и 3, приводимыми во вращение электродвигателем 4 через клиноременную передачу 5, вал 6 механизма синхронизации шпинделей и косозубые шестерни 7. На валу шестерни 8 механизма синхронизации шпинделей установлен диск фотоэлектрического импульсного датчика 9, который при каждом обороте шпинделя посылает в систему управления определенное количество Zi электрических импульсов.
Поперечная подача ножевого суппорта
10осуществляется двумя гидроцилиндрами
11и 12. Каждый гидроцилиндр связан двумя гидролиниями 13 и 14-с выходными окнами соответствующего четырех кромочного дросселирующего гидрораспределителя 15 и 16. Управление дросселирующими гидрораспределителями 15 и 16 осуществляется шаговыми электродвигателями 17 и 18 с помощью винтовых преобразователей, состоящих из гайки 19, смонтированной в шарикоподшипниках, и взаимодействуюCN VJ
СЬ
00
g
щего с ней валика управления 20 с резьбовым концом.
Винтовой преобразователь на входе каждого дросселирующего гидрораспределителя предназначен для преобразования углов поворота ротора шагового двигателя в соответствующее линейное смещение плунжера 21.
Величина перемещения ножевого суппорта 10 контролируется фотоэлектрическим импульсным датчиком 22, который установлен соосно с винтом 23 обратного винтового механизма и связан с ним посредством беззазорной муфты. Винт 23 смонтирован в радиально-упорных шарикоподшипниках 24 и взаимодействует с гайкой 25, установленной в суппорте. Перемещению суппорта 10 на шаг резьбы соответствует один полный оборот винта и связанного с ним ротора датчика 22, формирующего при этом определенное количества 2.1 электрических импульсов.
Гидросистема питается от насосной установки 26.
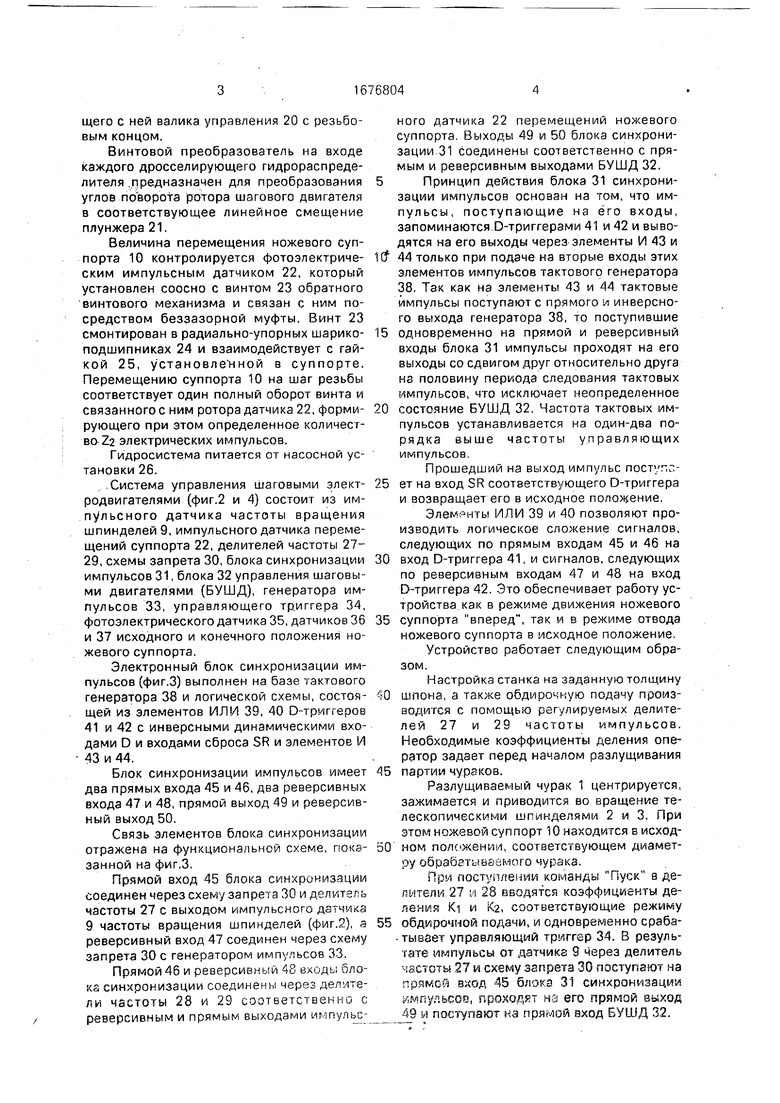
Система управления шаговыми электродвигателями (фиг.2 и 4) состоит из импульсного датчика частоты вращения шпинделей 9, импульсного датчика перемещений суппорта 22, делителей частоты 27- 29, схемы запрета 30, блока синхронизации импульсов 31, блока 32 управления шаговыми двигателями (БУШД), генератора импульсов 33, управляющего триггера 34, фотоэлектрического датчика 35, датчиков 36 и 37 исходного и конечного положения ножевого суппорта.
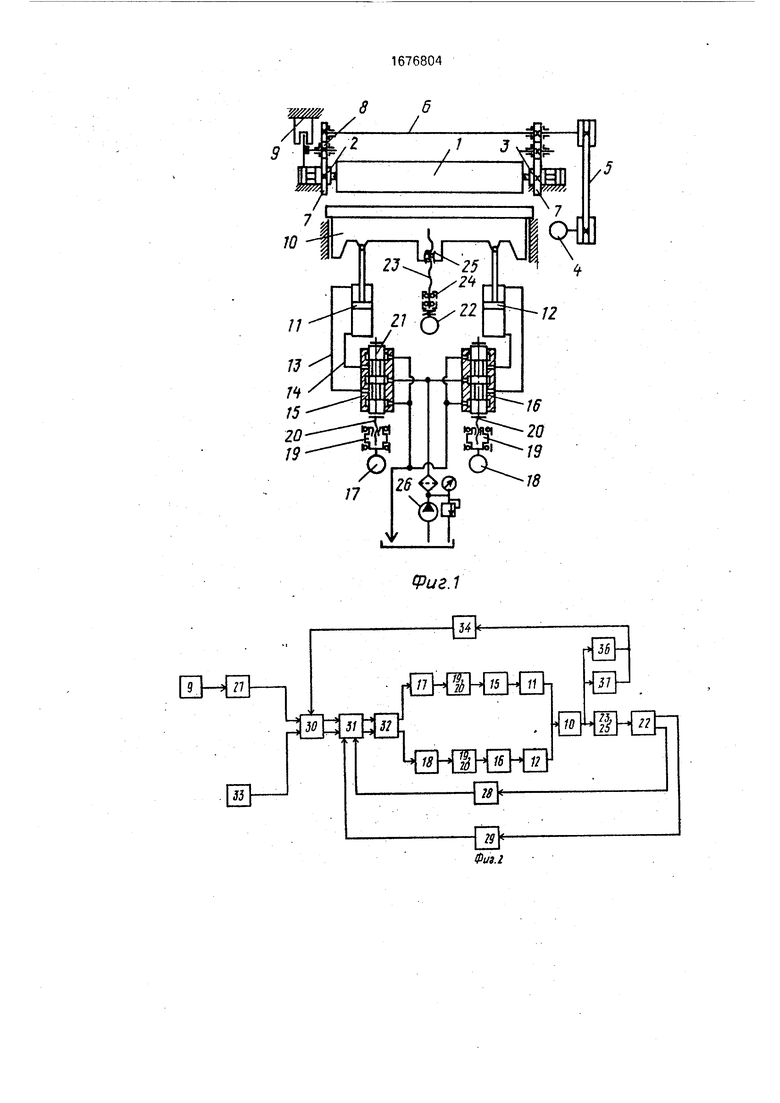
Электронный блок синхронизации импульсов (фиг.З) выполнен на базе тактового генератора 38 и логической схемы, состоящей из элементов ИЛИ 39, 40 D-триггеров 41 и 42 с инверсными динамическими входами D и входами сброса SR и элементов И 43 и 44.
Блок синхронизации импульсов имеет два прямых входа 45 и 46, два реверсивных входа 47 и 48, прямой выход 49 и реверсивный выход 50.
Связь элементов блока синхронизации отражена на функциональной схеме, показанной на фиг.З,
Прямой вход 45 блока синхронизации соединен через схему запрета 30 и делитесь частоты 27 с выходом импульсного датчика 9 частоты вращения шпинделей (фиг.2), а реверсивный вход 47 соединен через схему запрета 30 с генератором импульсов 33.
Прямой 46 и реверсивный 48 входы блока синхронизации соединены через делители частоты 28 и 29 соответственно с реверсивным и прямым выходами импульсного датчика 22 перемещений ножевого суппорта. Выходы 49 и 50 блока синхронизации 31 соединены соответственно с прямым и реверсивным выходами БУШД 32.
Принцип действия блока 31 синхронизации импульсов основан на том, что импульсы, поступающие на его входы, запоминаются D-триггерзми 41 и 42 и выводятся на его выходы через элементы И 43 и
0 44 только при подаче на вторые входы этих элементов импульсов тактового генератора 38. Так как на элементы 43 и 44 тактовые импульсы поступают с прямого и инверсного выхода генератора 38, то поступившие
5 одновременно на прямой и реверсивный входы блока 31 импульсы проходят на его выходы со сдвигом друг относительно друга на половину периода следования тактовых импульсов, что исключает неопределенное
0 состояние БУШД 32. Частота тактовых импульсов устанавливается на один-два порядка выше частоты управляющих импульсов
Прошедший на выход импульс поступс5 ет на вход SR соответствующего D-триггера и возвращает его в исходное положение.
Элем/анты ИЛИ 39 и 40 позволяют производить логическое сложение сигналов, следующих по прямым входам 45 и 46 на
0 вход D-триггера 41, и сигналов, следующих по реверсивным входам 47 и 48 на вход D-триггера 42. Это обеспечивает работу устройства как в режиме движения ножевого
5 суппорта вперед, так и в режиме отвода ножевого суппорта в исходное положение. Устройство работает следующим образом.
Настройка станка на заданную толщину
0 шпона, а также обдирочную подачу производится с помощью регулируемых делителей 27 и 29 частоты импульсов. Необходимые коэффициенты деления оператор задает перед началом разлущивания
5 партии чураков.
Разлущиваемый чурак 1 центрируется, зажимается и приводится во вращение телескопическими шпинделями 2 и 3. При этом ножевой суппорт 10 находится в исход0 ном положении, соответствующем диаметру обраЬгтиьазмого чурака.
При поступлении команды Пуск в делители 27 и 28 вводятся коэффициенты деления KI и Кг. соответствующие режиму
5 обдирочной подачи, и одновременно срабатывает управляющий триггер 34. В результате импульсы от датчика 9 через делитель частоты 27 и схему запрета 30 поступают на прямой вход 45 блока 31 синхронизации /мпульсов, проходят на его прямой выход 49 и поступают на прямой вход ЕУШД 32.
В БУШД 32 импульсы распределяются по фазам шаговых двигателей 17 и 18 в последовательности, определяемой необходимым направлением перемещения ножевого суппорта 10, усиливаются по мощности и подаются на управляющие обмотки шаговых двигателей 17 и 18.
При включении шаговых электродвигателей 17 и 18 начинают вращаться гайки 19 винтовых преобразователей, в которые ввинчиваются валики управления 20.
Плунжеры 21 смещаются из нейтрального положения и открывают выходные окна дросселирующих гидрораспределителей 15 и 16. В результате поршни гидроцилиндров 11 и 12 приходят в движение и начинают перемещать ножевой суппорт 10.
Подключение шаговых двигателей 17 и 18 параллельно к выходам одного блока 32 управления шаговыми двигателями обеспечивает синхронное перемещение поршней гидроцилиндров 11 и 12.
Поступательное перемещение суппорта 10 с помощью импульсного датчика 22 преобразуется в последовательность импульсов обратной связи, число которых Мое пропорционально величине, а частота foe скорости перемещения суппорта 10.
Импульсы по каналу обратной связи через делитель частоты 29 поступают на реверсивный вход 48 блока 31 синхронизации импульсов, проходят на его реверсивный выход 50 и поступают на реверсивный вход БУШД 32.
Таким образом, во время перемещения ножевого суппорта управляющие импульсы поступают как на прямой, так и на реверсивный входы БУШД 32. При этом шаговые двигатели 17 и 18 работают в режиме двух- частотного управления, обеспечивающего широтно-импульсную модуляцию фазных напряжений шаговых двигателей. Частота вращения роторов шаговых двигателей 17 и 18 в этом случае определяется выражением
(fn -fp) ,
где tVi. fp - частоты импульсов, поступающих соответственно на прямой и реверсивный входы БУШД;
а- угловая дискрета шаговых двигателей.
Если fVi fp, то роторы шаговых двигателей 17 и 18 вращаются в ту или иную сторону, изменяя положение плунжеров дросселирующих гидрораспределителей 15 и 16, а следовательно, скорость перемещения поршней гидроцилиндров 11, 12 и связанного с ними ножевого суппорта 10.
При равенстве частот, т.е. fM fp, роторы шаговых двигателей 17 и 18 останавливаются, удерживая плунжеры дросселирующих гидрораспределителей в положении, соответствующем установившейся скорости перемещения ножевого суппорта, обеспечивающей заданную делителями величину подачи.
После того, как чурак приобрел прэвильную цилиндрическую форму и срезаемый шпон пошел в виде сплошной ленты, срабатывает фотоэлектрический датчик 35 (фиг.4) и переключает суппорт с режима обдирочной подачи на рабочую. При этом величина
подачи определяется значениями коэффициентов деления Ki и К2, которые вводятся в делители частоты 27 и 29 по команде датчика 35.
В результате перемещение ножевого
суппорта 10 на каждый оборот шпинделей 2 и 3 остается постоянным и соответствует толщине срезаемого шпона:
25
л Zi S К2
л Z7KT
где Zi, Z2 - количество импульсов, формируемое за один оборот соответственно импульсным датчиком 9 частоты вращения
шпинделей и импульсным датчиком 22 перемещения ножевого суппорта 10; S - шаг винта 23 обратной связи; Ki и Ка - соответственно коэффициенты деления делителей частоты 27 и 29.
Таким образом, при помощи делителей частоты 27 и 29 возможно задание практически любой скорости движения ножевого суппорта 10, а следовательно, толщины шпона.
В процессе разлущивания чурака ножевой суппорт приближается к осп-шпинделей. При наименьшем допускаемом размере остатка (карандаша) срабатывает датчик 37 конечного положения суппорта.
При этом сигнал поступает на управляющий триггер 34, который переключает схему 30 запрета и на вход БУШД 32 начинают поступать импульсы от генератора импульсов 33. Начинается ускоренный отвод ножевого
суппорта в исходное положение, определяемое датчиком 36 исходного положения ножевого суппорта.
Во время отвода в исходное положение на вход 46 блока 31 синхронизации импульсов через делитель 28 частоты поступают импульсы с реверсивного выхода датчика 22 перемещений ножевого суппорта. Формула изобретения
1. Устройство для управления подачей ножевого суппорта лущильного станка, включающее насосную установку, исполнительные гидроцилиндры, связанные с суппортом, первый дросселирующий гидрораспределитель с выполненным в виде шагового электродвигателя приводом перемещения его плунжера, импульсный датчик частоты вращения шпинделей, подключенный к входу первого делителя частоты импульсов, блок управления шаговыми электродвигателями, генератор импульсов, схему запрета, триггер, а также датчики исходного и конечного положения суппорта, причем выход делителя частоты подключен к первому входу схемы запрета, а выход триггера - к второму ее входу, причем первый выход блока управления шаговыми двигателями посредством шагового двигателя связан с плунжером дросселирующего гидрораспределителя, при этом штоковая полость первого исполнительного гидроцилиндра связана с первой, а бесштоковая - с второй линиями первого дросселирующего гидрораспределителя, третья и четвертая линии которого объединены и связаны со сливом, а пятая соединена с выходом насосной установки, с возможностью сообщения в одном положении плунжера первой линии с четвертой, а второй - с пятой, а во втором положении плунжера первой линии - с пятой, а второй - с третьей, отличающее- с я тем, что, с целью повышения точности в работе устройства, повышения быстродействия и расширения его технологических возможностей, оно снабжено вторым дросселирующим гидрораспределителем с соответствующим шаговым электродвигателем на входе, включенным аналогично первому дросселирующему гидрораспределителю к второму гидроцилиндру, импульсным датчиком перемещения суппорта, вторым и третьим делителями частоты импульсов,
электронным блоком синхронизации импульсов, который имеет два прямых и два реверсивных входа, а также прямой и реверсивный выходы, причем первый прямой
вход подключен к первому выходу схемы запрета, второй прямой вход соединен через второй делитель частоты с реверсивным выходом импульсного датчика перемещений суппорта, первый реверсивный входсоединен с вторым выходом схемы запрета, второй вход которой связан с генератором импульсов, второй реверсивный вход соединен через делитель частоты с прямым выходом импульсного датчика перемещений
суппорта, а прямой и реверсивный выходы блока синхронизации импульсов подключены соответственно к прямому и реверсивному входам блока управления шаговыми электродвигателями, к второму выходу которого подключен параллельно первому второй шаговый двигатель второго дросселирующего гидрораспределителя.
2. Устройство поп.1,отличающеес я тем, что блок синхронизации импульсов выполнен в виде тактового генератора с прямым и инверсным выходами и двух цепей, каждая из которых содержит элемент ИЛИ, D-триггер с динамическим инверсным
управляющим входом и входом сброса и двухвходовый элемент И. причем в каждой цепи выход элемента ИЛИ подключен к входу D-триггера, выход которого соединен с входом элемента И, второй вход элемента И
соединен в первой цепи с прямым, а во второй - с инверсным выходами тактового генератора, выход элемента И соединен с входом сброса D-триггера, этом выходы блока синхронизации образованы выходами элементов И, а каждая пара входов блока синхронизации содержит по одному входу от каждого элемента ИЛИ.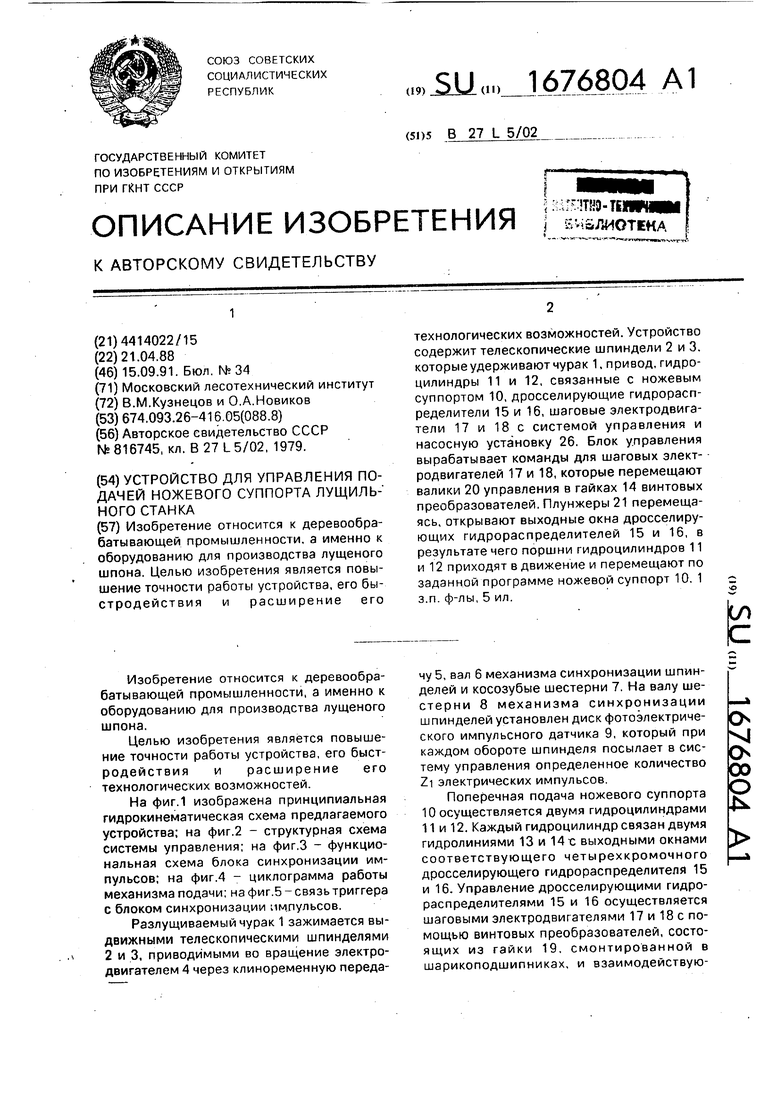
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления подачейНОжЕВОгО СуппОРТА лущильНОгО CTAHKA | 1979 |
|
SU816745A1 |
| Устройство для позиционирования рабочих органов деревообрабатывающих станков | 1987 |
|
SU1412945A1 |
| Программное устройство для поддержания постоянства скорости резания | 1984 |
|
SU1211696A1 |
| Устройство стабилизации скорости резания для токарно-винтовых станков с числовым программным управлением | 1983 |
|
SU1180845A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
| УСТРОЙСТВО ДЛЯ ОБТОЧКИ КРИСТАЛЛОВ | 1991 |
|
RU2030998C1 |
| Аналого-цифровое устройство для управления токарным станком | 1980 |
|
SU947830A1 |
| Устройство для дробления стружки на станках с программным управлением | 1982 |
|
SU1072001A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Система программного управления | 1982 |
|
SU1022116A1 |
Изобретение относится к деревообрабатывающей промышленности, а именно к оборудованию для производства лущеного шпона. Целью изобретения является повышение точности работы устройства, его быстродействия и расширение его технологических возможностей. Устройство содержит телескопические шпиндели 2 и 3. которые удерживают чурак 1, привод, гидроцилиндры 11 и 12, связанные с ножевым суппортом 10, дросселирующие гидрораспределители 15 и 16, шаговые электродвигатели 17 и 18 с системой управления и насосную установку 26. Блок управления вырабатывает команды для шаговых электродвигателей 17 и 18, которые перемещают валики 20 управления в гайках 14 винтовых преобразователей. Плунжеры 21 перемещаясь, открывают выходные окна дросселирующих гидрораспределителей 15 и 16, в результате чего поршни гидроцилиндров 11 и 12 приходят в движение и перемещают по заданной программе ножевой суппорт 10. 1 з.п. ф-лы, 5 ил.
Фиг.1
S№№
SI
39
5/
41
40
SK
42
Sbicfnobw отбод
43
49
44
50
Фиг.5
Обдирочная подача
Рабочая подача
...... /
37
Фиг. 4
№ ппЬо пнйдунпэ
DUOlf§ WQUXgDtf
w-v
tt
| Устройство для управления подачейНОжЕВОгО СуппОРТА лущильНОгО CTAHKA | 1979 |
|
SU816745A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
