Изобретение относится к области авиационной техники, в частности, к конструкции буксируемых систем.
Цель изобретения - расширение эксплуатационных характеристик за счет увеличения диапазона углов отклонения плоской системы от вертикали.
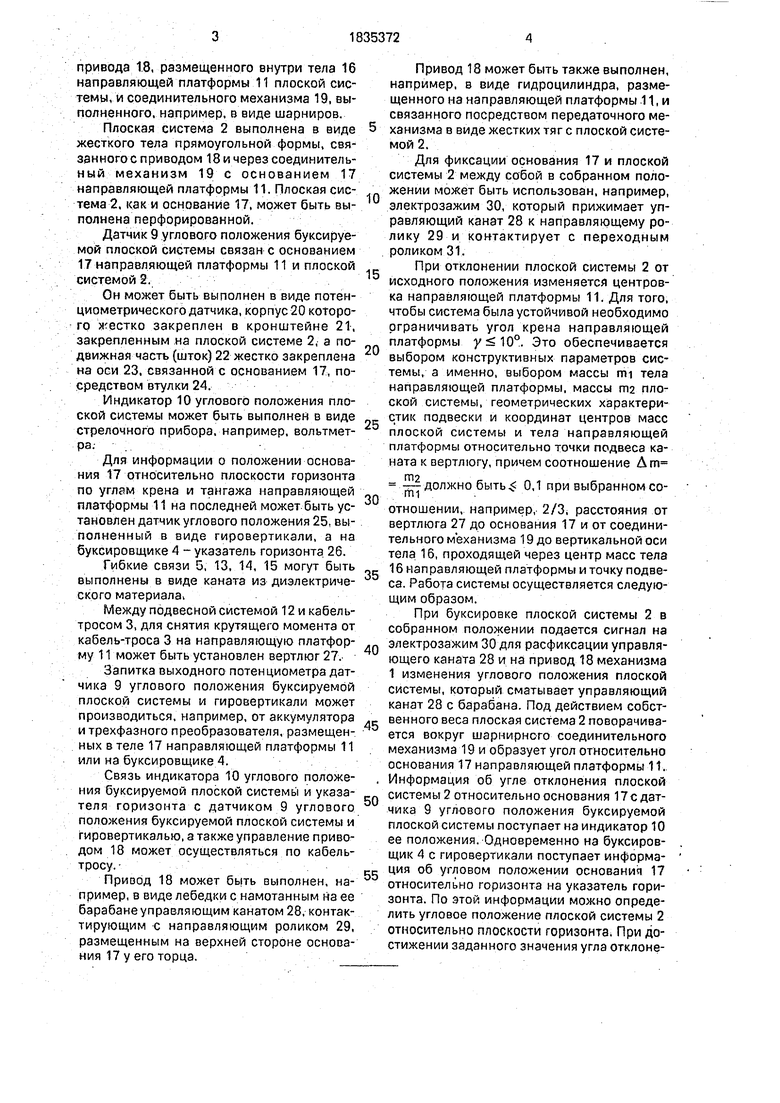
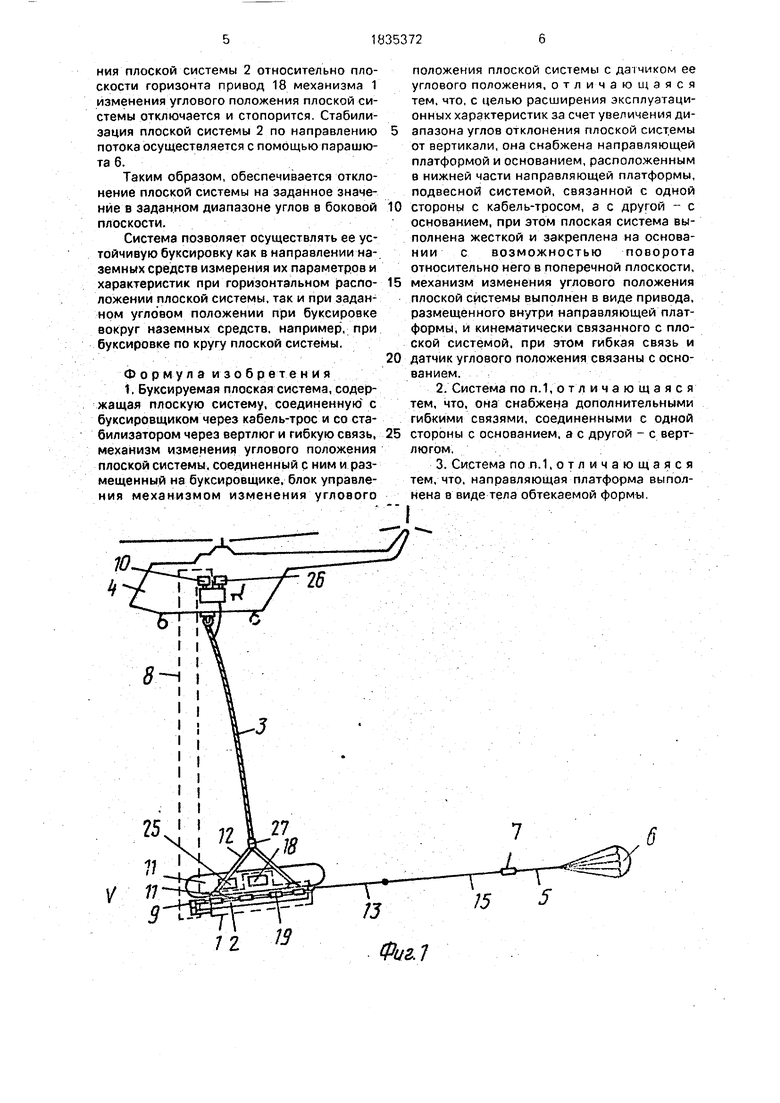
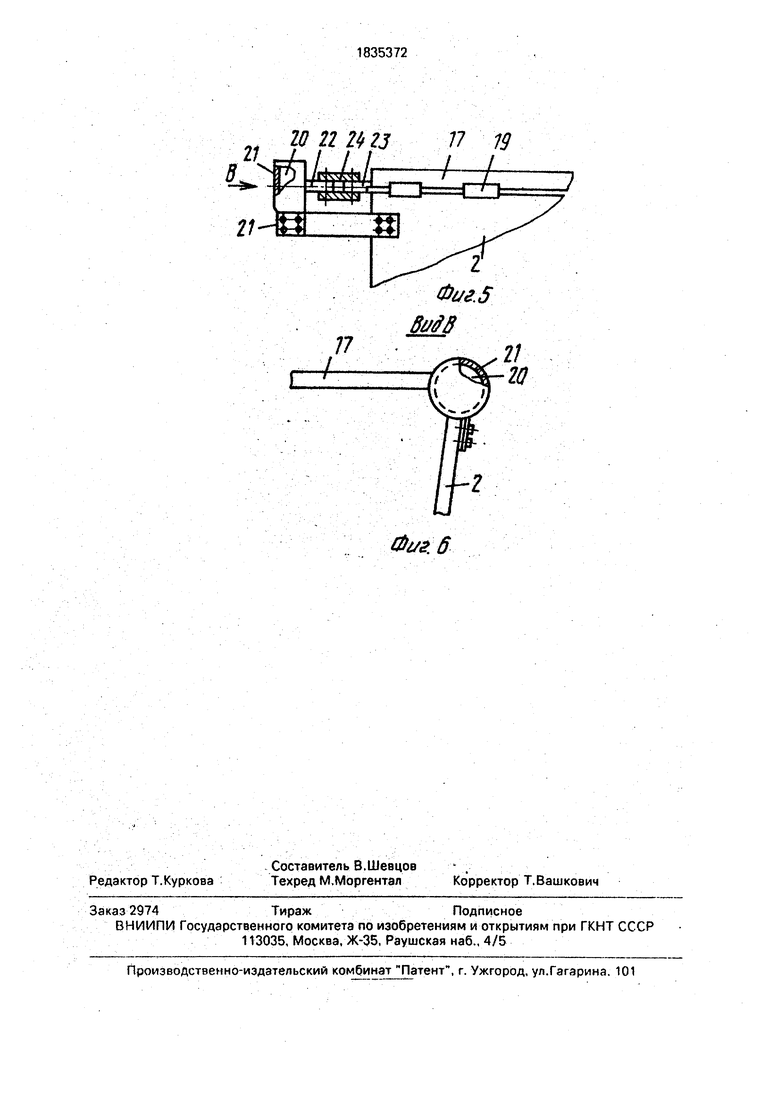
Конструкция буксируемой плоской системы представлена на фиг. 1 - 6, где изображены; на фиг. 1 - общий вид буксируемой системы с расположением плоской системы в горизонтальной плоскости; на фиг.2 - общий вид буксируемой системы с отклоненным положением плоской системы; на фиг.З - система в отклоненном положении (вид сбоку); на фиг.4 - система в отклоненном положении (вид А); на фиг,5 - конструкция крепления датчика углового положения плоской системы; на фиг.6 - конструкция креп- , ления датчика углового положения плоской системы, вид В.
Буксируемая плоская система содержит механизм 1 изменения углового положения плоской системы 2, кабель-трос 3, одним концом связанный с буксировщиком 4, например, вертолетом и т.д., гибкую связь 5,
одним концом связанную со стабилизатором б буксируемой системы по направлению потока, например, парашютом, конусом и т.д., а другим - с вертлюгом 7, и блок 8 управления механизмом углового положения плоской системы, имеющий датчик 9 углового положения буксируемой плоской системы, связанный с индикатором 10 ее положения, размещенным на буксировщике 4.
Система также снабжена направляющей платформой 11 nnof. ой системы, подвесной системой 12 И дополнительными гибкими связями 13, 14, 15.
Направляющая платформа 11 плоской системы выполнена в виде тела 16 обтекаемой формы, на котором снизу закреплено основание 17лрямоугольной формы, расположенное в горизонтальной плоскости тела 16 и связанное с одной стороны через подвесную систему 12 с другим концом кабель- троса 3, а е другой стороны через дополнительные гибкие связи 13, 14, 15 - с вертлюгом 7.
Механизм 1 изменения углового положения плоской системы выполнен в япде.
сл
с
00
со ся
00
К)
привода 1.8, размещенного внутри тела 16 направляющей платформы 11 плоской системы, и соединительного механизма 19, выполненного, например, в виде шарниров.
Плоская система 2 выполнена в виде жесткого тела прямоугольной формы, связанного с приводом 18 и через соединительный механизм 19 с основанием 17 направляющей платформы 11. Плоская система 2, как и основание 17, может быть выполнена перфорированной.
Датчик 9 углового положения буксируемой плоской системы связан с основанием 1.7 направляющей платформы 11 и плоской системой 2.
Он может быть выполнен в виде потен- циометрического датчика, корпус 20 которого жестко закреплен в кронштейне 21, закрепленным на плоской системе 2, а подвижная часть (шток) 22 жестко закреплена на оси 23. связанной с основанием 17, посредством втулки 24.
Индикатор 10 углового положения плоской системы может быть выполнен в виде стрелочного прибора, например, вольтметра.- .
Для информации о положении основания 17 относительно плоскости горизонта по углам крена и тангажа направляющей платформы 11 на последней может быть установлен датчик углового положения 25, вы- полненный в аиде гировертикали, а на буксировщике А - указатель горизонта 26.
Гибкие связи 5, 13, 14, 15 могут быть выполнены в виде каната из диэлектрического материала.
Между подвесной системой 12 и кабель- тросом 3, для снятия крутящего момента от кабель-троса 3 на направляющую платформу 11 может быть установлен вертлюг 27.
Запитка выходного потенциометра датчика 9 углового положения буксируемой плоской системы и гировертикали может производиться, например, от аккумулятора и трехфазного преобразователя, размещенных в теле 17 направляющей платформы 11 или на буксировщике 4.
Связь индикатора 10 углового положения буксируемой плоской системы и указателя горизонта с датчиком 9 углового положения буксируемой плоской системы и гировертикалью, а также управление приводом 18 может осуществляться по кабель- тросу.Привод 18 может быть выполнен, например, в виде лебедки с намотанным на ее барабане управляющим канатом 28, контактирующим с направляющим роликом 29, размещенным на верхней стороне основания 17 у его торца.
0
5
0
5
0
5
0
5
0
5
Привод 18 может быть также выполнен, например, в виде гидроцилиндра, размещенного на направляющей платформы 11, и связанного посредством передаточного механизма в виде жестких тяг с плоской системой 2.
Для фиксации основания 17 и плоской системы 2 между собой в собранном положении может быть использован, например, электрозажим 30, который прижимает управляющий канат 28 к направляющему ролику 29 и контактирует с переходным роликом 31,
При отклонении плоской системы 2 от исходного положения изменяется центровка направляющей платформы 11. Для того, чтобы система была устойчивой необходимо ограничивать угол крена направляющей платформы у 10°. Это обеспечивается выбором конструктивных параметров системы, а именно, выбором массы гщ тела направляющей платформы, массы тг плоской системы, геометрических характеристик подвески и координат центров масс плоской системы и тела направляющей платформы относительно точки подвеса каната к вертлюгу, причем соотношение Дт
ГП2
должно быть 0,1 при выбранном comi
отношении, например, 2/3, расстояния от вертлюга 27 до основания 17 и от соединительного механизма 19 до вертикальной оси тела 16, проходящей через центр масс тела 16 направляющей платформы и точку подвеса. Работа системы осуществляется следующим образом.
При буксировке плоской системы 2 в собранном положении подается сигнал на электрозажим 30 для расфиксации управляющего каната 28 и на привод 18 механизма 1 изменения углового положения плоской системы, который сматывает управляющий канат 28 с барабана. Под действием собственного веса плоская система 2 поворачивается вокруг шарнирного соединительного механизма 19 и образует угол относительно основания 17 направляющей платформы 11.. Информация об угле отклонения плоской системы 2 относительно основания 17 с датчика 9 углового положения буксируемой плоской системы поступает на индикатор 10 ее положения. Одновременно на буксировщик 4 с гировертикали поступает информация об угловом положении основания 17 относительно горизонта на указатель горизонта. По этой информации можно определить угловое положение плоской системы 2 относительно плоскости горизонта При достижении заданного значения угла отклонения плоской системы 2 относительно плоскости горизонта привод 18 механизма 1 изменения углового положения плоской системы отключается и стопорится. Стабилизация плоской системы 2 по направлению потока осуществляется с помощью парашюта 6.
Таким образом, обеспечивается отклонение плоской системы на заданное значение в заданном диапазоне углов в боковой плоскости.
Система позволяет осуществлять ее устойчивую буксировку как в направлении наземных средств измерения их параметров и характеристик при горизонтальном расположении плоской системы, так и при заданном угловом положении при буксировке вокруг наземных средств, например, при буксировке по кругу плоской системы.
Форму л а изобретения 1. Буксируемая плоская система, содержащая плоскую систему, соединенную с буксировщиком через кабель-трос и со стабилизатором через вертлюг и гибкую связь, механизм изменения углового положения плоской системы, соединенный с ним и размещенный на буксировщике, блок управления механизмом изменения углового
положения плоской системы с датчиком ее углового положения, отличаю и; аяся тем, что, с целью расширения эксплуатационных характеристик за счет увеличения ди5 апазона углов отклонения плоской системы от вертикали, она снабжена направляющей платформой и основанием, расположенным в нижней части направляющей платформы, подвесной системой, связанной с одной
0 стороны с кабель-тросом, а с другой - с основанием, при этом плоская система выполнена жесткой и закреплена на основании с возможностью поворота относительно него в поперечной плоскости,
5 механизм изменения углового положения плоской системы выполнен в виде привода, размещенного внутри направляющей платформы, и кинематически связанного с плоской системой, при этом гибкая связь и
0 датчик углового положения связаны с основанием.
2.Система по п. отличающаяся тем, что, она снабжена дополнительными гибкими связями, соединенными с одной
5 стороны с основанием, а с другой - с вертлюгом.
3.Система по п.1. о т л и ч а ю щ а я с я тем, что, направляющая платформа выполнена в виде тела обтекаемой формы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Буксируемая плоская система | 1989 |
|
SU1835373A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ | 1989 |
|
SU1753669A1 |
| Устройство для буксировки измерителя магнитного поля | 1990 |
|
SU1770930A1 |
| Комплекс ориентации диполей буксируемой антенной системы | 1990 |
|
SU1755522A1 |
| Устройство для буксировки гибкой системы | 1989 |
|
SU1663888A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ТЕЛА | 1988 |
|
SU1619602A1 |
| Устройство для буксировки и выпуска - уборки буксируемого тела | 1991 |
|
SU1749124A1 |
| УСТРОЙСТВО ДЛЯ ВЫПУСКА-УБОРКИ БУКСИРУЕМОГО ОБЪЕКТА | 1995 |
|
RU2094321C1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ТЕЛ | 1989 |
|
SU1797239A2 |

Изобретение относится к области авиационной техники. Цель изобретения - расширение эксплуатационных характеристик за счет увеличения диапазона отклонения буксируемой плоской системы в поперечной плоскости в одном полете. Плоская система 2 выполнена жесткой и закреплена на основании 17 направляющей платформы 11с возможностью поворота на любой заданный угол в поперечной плоскости с помощью привода 18, чем обеспечивается необходимая ориентация плоской системы при снятии характеристик наземных источников излучения. 2 з.п,ф-лы, 6 ил.
72
19
Фиг. I
Wff
-ч
в
21
го пгпз
2117 19
&г/гб
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ | 1988 |
|
SU1797238A1 |
| кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
