Изобретение относится к авиационной технике, в частности к устройствам для буксировки измерительных систем, например рупорных антенных систем, на гибкой связи, и может быть использовано при буксировке измерительных систем вокруг и в направлении наземных радиосредств в одном полете для определения их параметров и характеристик.
Известна буксируемая измерительная система, содержащая буксировщик, например вертолет, связанный через датчик измерительной системы, например антенну, со стабилизатором ее положения по направлению потока (конусным парашютом).
Недостатком системы является низкое быстродействие прохождения заданных сечений пространства по высоте при движении измерительной системы вокруг и в направлении центра круговой траектории в одном полете и низкие эксплуатационные характеристики.
Известна также буксируемая измерительная система, содержащая связанные с буксировщиком одними концами вертикально расположенные несущие канаты, другие концы которых связаны с несущим модулем, датчик измерительной системы и элемент его ориентации.
Данная система имеет низкое быстродействие и низкие эксплуатационные характеристики, обусловленные тем, что не обеспечивается одновременное прохождение измерительной системой заданного сечения S1 = L˙H с шагом Δ Н по высоте, расположенного на круговой траектории с центром в точке 01 и радиусом R на высотах Нмакс, так как в этом случае измерительная система последовательно буксируется на высотах от Н1 до Н5 и не обеспечивает последующего одновременного прохождения сечения, расположенного в направлении центра круговой траектории О1 по углу места ϕ1 хН и в заданном угле азимута Ψ1 на разных высотах в одном полете. Кроме того, при последовательном прохождении ряда высот при движении по кругу и в направлении центра круга снижается точность из-за ошибок пилотирования, так как при повторном движении по кругу трудно выдерживать тот же радиус R круговой траектории, высоту полета и направление на центр круговой траектории из-за действия возмущений, изменения параметров среды и т. д. Увеличение времени ведет к дополнительному расходу топлива буксировщика и материальных ресурсов на проведение работ по буксировке измерительной системы в заданных сечениях пространства.
Целью изобретения является расширение эксплуатационных характеристик системы и сокращение времени регистрации характеристик наземных антенн за счет одновременного снятия их характеристик в заданных сечениях по высоте при буксировке измерительной системы по круговой траектории и в направлении ее центра в одном полете.
Поставленная цель достигается тем, что буксируемая измерительная система, содержащая связанные с буксировщиком одними концами вертикально расположенные несущие канаты, другие концы которых связаны с несущим модулем, датчик измерительной системы и элемент его ориентации, согласно изобретению снабжена механизмом изменения положения измерительной системы, выполненными в виде двух приводов, размещенных соответственно на буксировщике и несущем модуле и кинематически связанных с несущими канатами, дополнительными датчиками и элементами их ориентации, причем датчики измерительной системы, измерительные оси которых расположены перпендикулярно продольной плоскости, закреплены на элементах их ориентации, закрепленных на несущих канатах параллельно друг другу и продольной оси буксировщика.
Кроме того, элементы ориентации датчиков выполнены перфорированными.
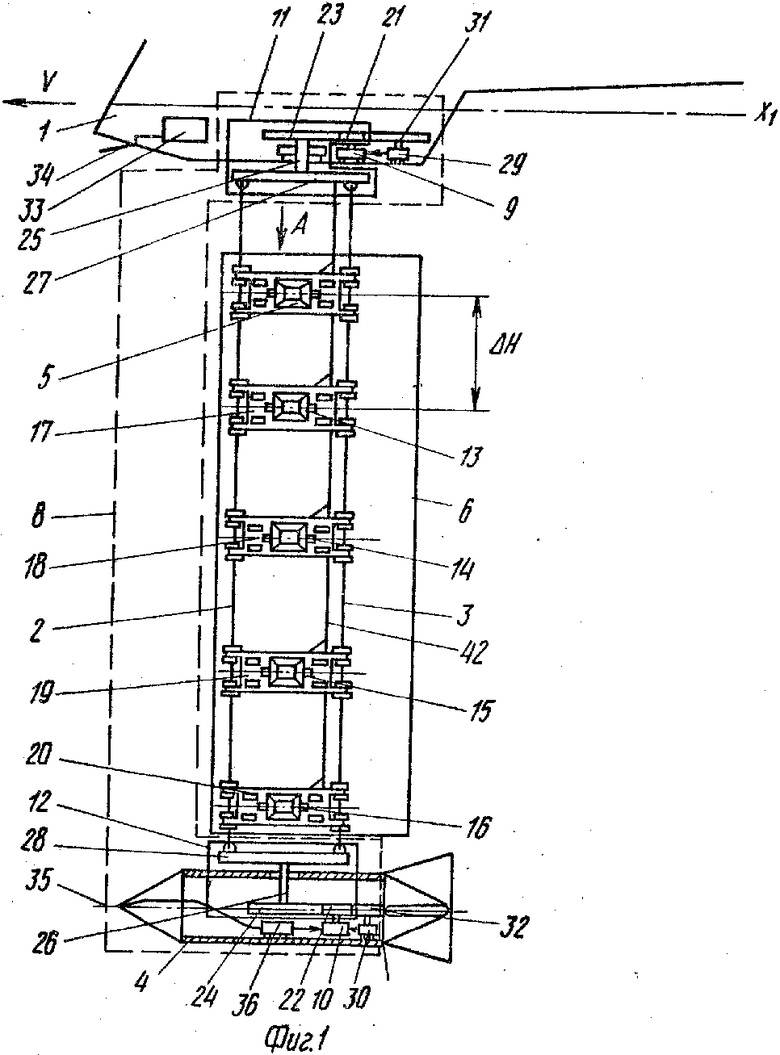
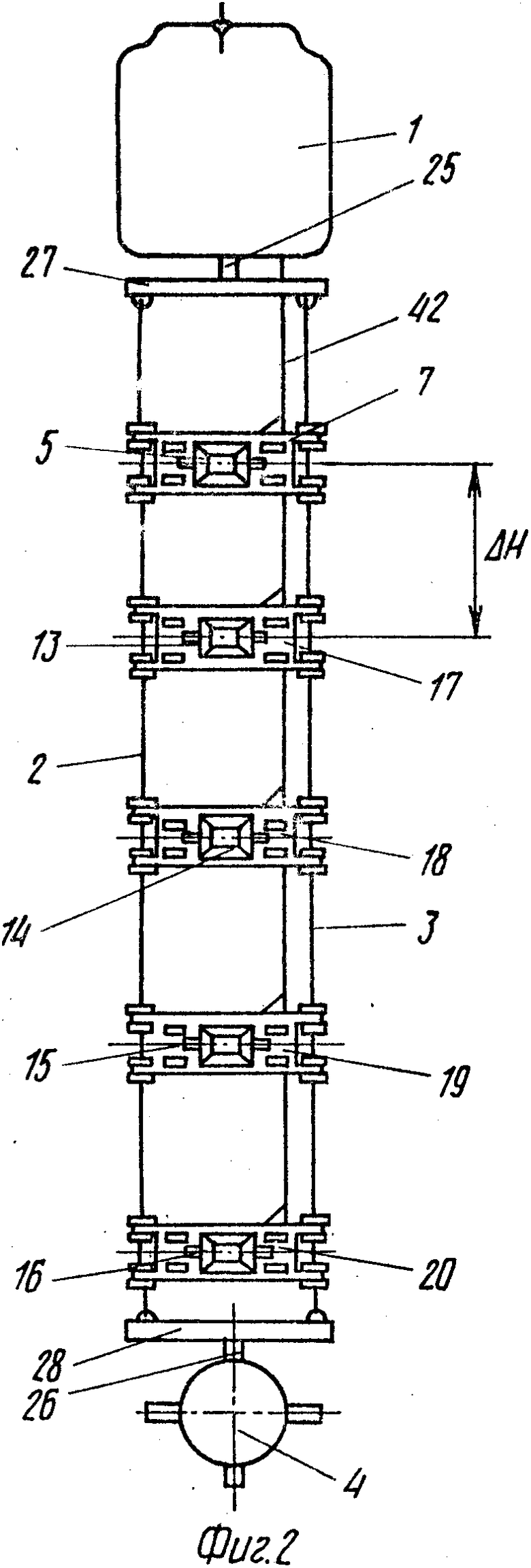
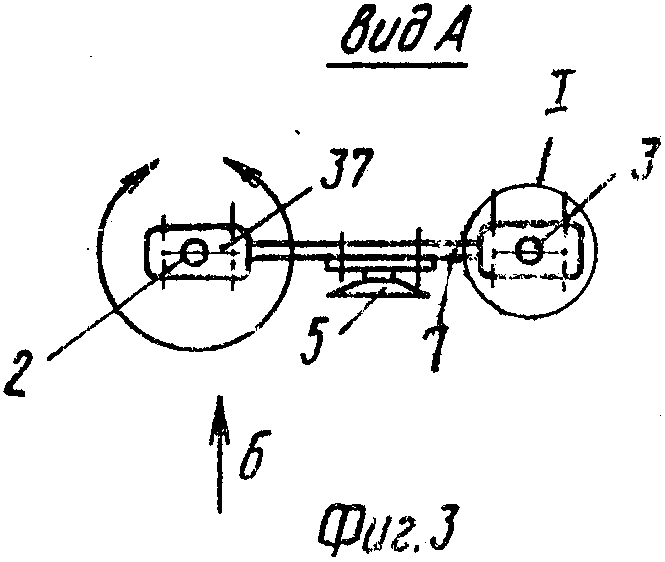
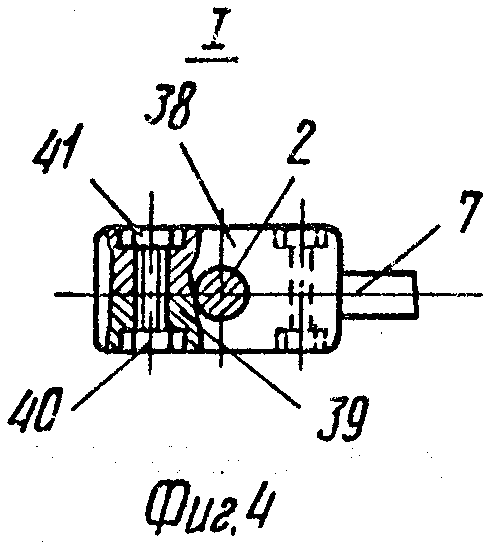
На фиг. 1 изображена схема системы при буксировке по круговой траектории; на фиг. 2 - то же, при изменении положения измерительной системы и буксировке ее в диаметральном направлении; на фиг. 3 - схема крепления элемента ориентации датчиков на несущих канатах (вид А на фиг. 1); на фиг. 4 - узел I на фиг. 3; на фиг. 5 - вид Б на фиг. 3; на фиг. 6 - схема, поясняющая работу системы при перемещении измерительной системы по круговой траектории; на фиг. 7 - схема, поясняющая работу системы при диаметральном перемещении измерительной системы; на фиг. 8 - схема, поясняющая работу системы при диаметральном перемещении измерительной системы, вид В на фиг. 7.
Буксируемая измерительная система содержит связанные с буксировщиком 1, например вертолетом, одними концами вертикально расположенные несущие канаты 2 и 3, другие концы которых связаны с несущим модулем 4, датчик 5 измерительной системы 6, например рупорную антенну, измерительная ось которой направлена перпендикулярно к продольной оси буксировщика 1, и элемент 7 его ориентации.
Буксируемая система снабжена механизмом 8 изменения положения измерительной системы, выполненным в виде двух приводов 9 и 10, размещенных соответственно на буксировщике 1 и несущем модуле 4 и кинематически связанных через последовательные механизмы 11 и 12 с несущими канатами 2 и 3, дополнительными датчиками 13 - 16 и элементами 17 - 20 их ориентации, причем датчики 5 и 13-16 измерительной системы 6 размещены на элементах 7 и 17-20 ориентации датчиков, которые закреплены на несущих канатах 2 и 3 параллельно друг другу и продольной оси буксировщика 1.
Элементы 7 и 17-20 ориентации выполнены перфорированными для снижения влияния на них набегающего потока и обеспечения расположения их перпендикулярно потоку.
Передаточные механизмы 11 и 12 состоят из ведущих шестерен 21 и 22, закрепленных на выходных валах приводов 9 и 10, и колес 23 и 24, взаимодействующих с шестернями 21 и 22. Колеса 23 и 24 насажены на оси 25 и 26, на которых также закреплены основания 27 и 28, с которыми связаны концы несущих канатов 2 и 3.
Для фиксации измерительных осей датчиков 5 и 13 - 16 при перемещении их из одного положения в другое (из положения, перпендикулярного продольной плоскости буксировщика, в положение, совпадающее с его продольной плоскостью) на буксировщике 1 и несущем модуле 4 установлены измерительные положения измерительных осей датчиков 5 и 13 - 16, выполненные, например, в виде концевых выключателей 29 и 30 и кинематически через колеса 31 и 32 и шестерни 21 и 22 связанные с приводами 9 и 10.
Приводы 9 и 10 выполнены в виде электродвигателей с тормозами, причем после срабатывания концевых выключателей 29 и 30 валы электродвигателей ставятся на тормоз.
Управление двигателем привода 9 осуществляется с буксировщика 1, а двигателем 10 также с буксировщика 1 по радиоканалу, например, через передатчик 33, передающую антенну 34, приемную антенну 35, приемник 36, электрически связанный с приводом 10.
Подача управляющего напряжения на обмотки двигателей приводов 9 и 10 осуществляется одновременно.
Для крепления элементов 7 и 17 - 20 на несущих канатах 2 и 3 служат пластины 37, изготовленные из диэлектрического материала, например полистирола, текстолита и другого материала.
Пластины 37 могут быть выполнены разрезными и состоящими из двух половин 38 и 39, закрепленных посредством винтов 40 и гаек 41 на несущих канатах 2. Аналогично выполнено крепление пластин на несущем канате 3.
Несущий модуль 4 выполнен с оперением, например, крестообразной формы.
Элементы ориентации датчиков выполнены в виде пластин.
Для передачи информации на борт буксировщика 1 с датчиков 5 и 13 - 16 служит кабель-трос 42.
Несущие канаты могут быть выполнены металлическими, а в ряде случаев из диэлектрика, например капрона, дакрона и т. д.
Расстояние между датчиками измерительной системы Δ Н определяется из конструктивных соображений, а именно высот Н1-Н5, на которых необходимо перемещение датчиков.
Расстояние между буксировщиком 1 и датчиком 5 измерительной системы 6 выбирается конструктивно исходя из заданной величины превышения буксировщика 1 относительно максимальной высоты сечения Нмакс.
Вес несущего модуля выбирается из конструктивных соображений, а именно минимального отклонения от вертикали канатов 2 и 3 и обеспечения устойчивого положения измерительных осей датчиков измерительной системы.
Система работает следующим образом.
Буксировщик 1 располагается на заданном режиме R при круговой буксировке и на заданной высоте так, чтобы элементы 7 и 17 - 20 ориентации датчиков 5 и 13 - 16 располагались на высотах от Н5 до Н1 и измерительные оси датчиков 5 и 13 - 16 были направлены перпендикулярно продольной плоскости буксировщика 1 и на центр круга. Буксировщик 1 за один раз проходит по кругу с постоянным расстоянием между датчиками 5 и 13 - 16 заданное сечение S1. Информация о параметрах и характеристиках наземных антенн, расположенных в центре круга О1, снимается при прохождении по кругу и передается на регистратор на борту буксировщика 1. Для буксировки датчиков 5 и 13 - 16 измерительной системы 6 в диаметральном направлении производят изменение положения измерительных осей датчиков 5 и 13 - 16 за счет их поворота на заданный угол, например 90о. Для этого подается электрический сигнал на электродвигатели приводов 9 и 10 механизма 8 изменения положения измерительной системы 6. Приводы 9 и 10 через передаточные механизмы 11 и 12 поворачивают несущие канаты 2 и 3 вокруг вертикальных осей буксировщика 1 и несущего модуля 4. Вместе с несущими канатами 2 и 3 поворачиваются на заданный угол элементы 7 и 17 - 20 ориентации датчиков 5 и 13 - 16 измерительной системы 6, с положением которых жестко связаны измерительные оси датчиков 5 и 13 - 16. По достижении заданного угла 90о срабатывают концевые выключатели 29 и 30, отключающие электродвигатели приводов 9 и 10 и ставящие их выходные валы на тормоз путем подачи на них напряжения. Буксировщик 1 после перемещения измерительных осей датчиков 5 и 13 - 16 буксирует измерительную систему 6 в диаметральном положении на центр круговой траектории и за один раз на разных высотах расположения ее датчиков. Информация о параметрах и характеристиках наземных антенн, расположенных в центре круга О1, снимается и передается на борт буксировщика 1.
Таким образом, в одном полете обеспечивается буксировка измерительной системы по круговой и радиальной (диаметральной) траектории за один рабочий цикл.
Предложенная буксируемая измерительная система позволяет повысить быстродействие прохождения заданных сечений пространства по высоте при движении измерительной системы по и в направлении центра круговой траектории в одном полете за счет размещения измерительной системы с шагом по высоте и обеспечения перемещения измерительной системы из одного положения в другое.
Кроме того, обеспечиваются более высокая точность прохождения заданных сечений по высоте и сокращаются расходы на топливо и материальные ресурсы при проведении работ данного типа. (56) 1. Фрадин А. З. , Рыжков Е. В. Измерения параметров антенно-фидерных устройств. М. : Госиздат литературы по вопросам связи и радио, 1962, с. 270, рис. 9.15.
2. Авторское свидетельство СССР N 1496165, кл. В 64 D 3/00, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКСИРУЕМОЕ АНТЕННОЕ УСТРОЙСТВО | 1989 |
|
SU1762503A1 |
| Устройство для буксировки измерителя магнитного поля | 1990 |
|
SU1770930A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Устройство для буксировки гибкой системы | 1989 |
|
SU1663888A1 |
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| СПОСОБ УПРАВЛЕНИЯ АВИАЦИОННОЙ БУКСИРОВОЧНОЙ ТРОСОВОЙ СИСТЕМОЙ | 2009 |
|
RU2395430C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПО КРУГУ АВИАЦИОННОЙ БУКСИРОВОЧНОЙ ТРОСОВОЙ СИСТЕМЫ | 2011 |
|
RU2466062C1 |




Изобретение относится к авиационной технике, в частности к устройствам для буксировки измерительных систем. Цель изобретения - расширение эксплуатационных характеристик системы и сокращение времени регистрации характеристик наземных антенн за счет одновременного снятия их характеристик в заданных сечениях по высоте при буксировке измерительной системы по круговой траектории и в направлении ее центра в одном полете. Снятие характеристик антенн одновременно в нескольких сечениях обеспечивается размещением нескольких датчиков с заданным шагом по высоте на соответствующих элементах ориентации, закрепленных на несущих канатах. Снятие характеристик антенн при буксировке измерительной системы как по круговой траектории, так и в направлении ее центра обеспечивается механизмом изменения положения измерительной системы в виде приводов, поворачивающих измерительную систему в нужном направлении. 1 з. п. ф-лы, 8 ил.
