Изобретение относится к грузозахватным устройствам, в частности к захватам для подъема и сдвигания штабеля штучных грузов, расположенных с зазорами, например гипсовых плит при съеме их с сушильных вагонеток.
Цель изобретения - повышение удобства в эксплуатации.
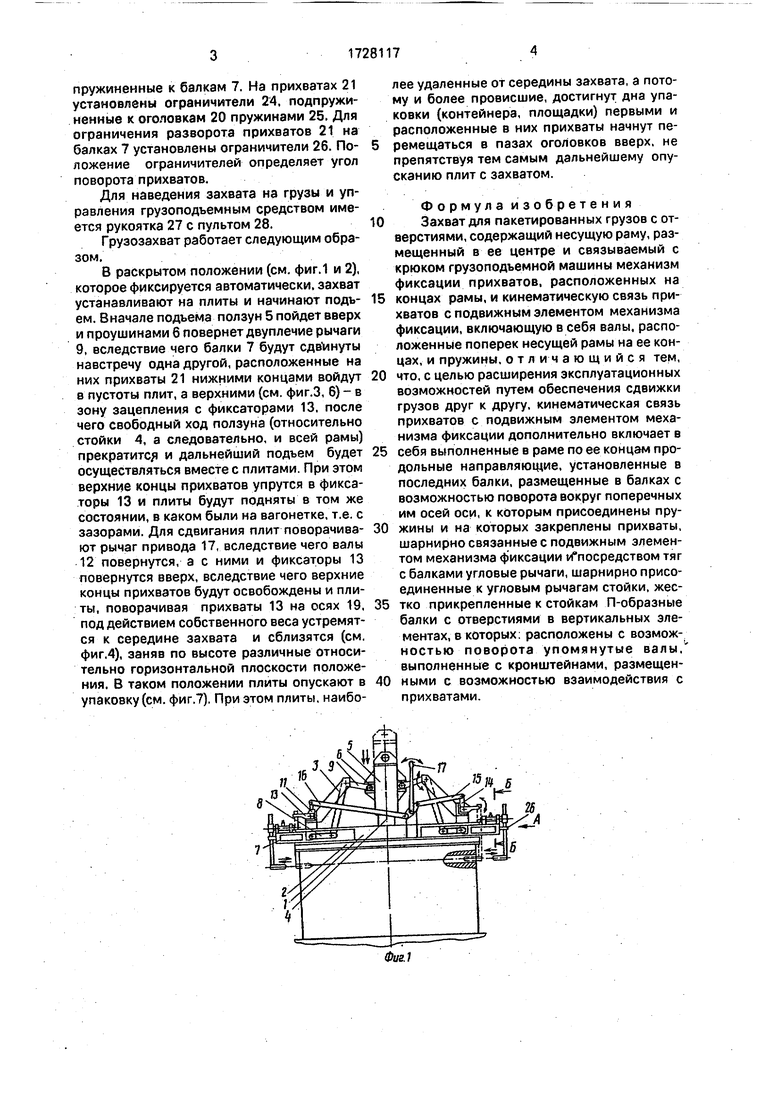
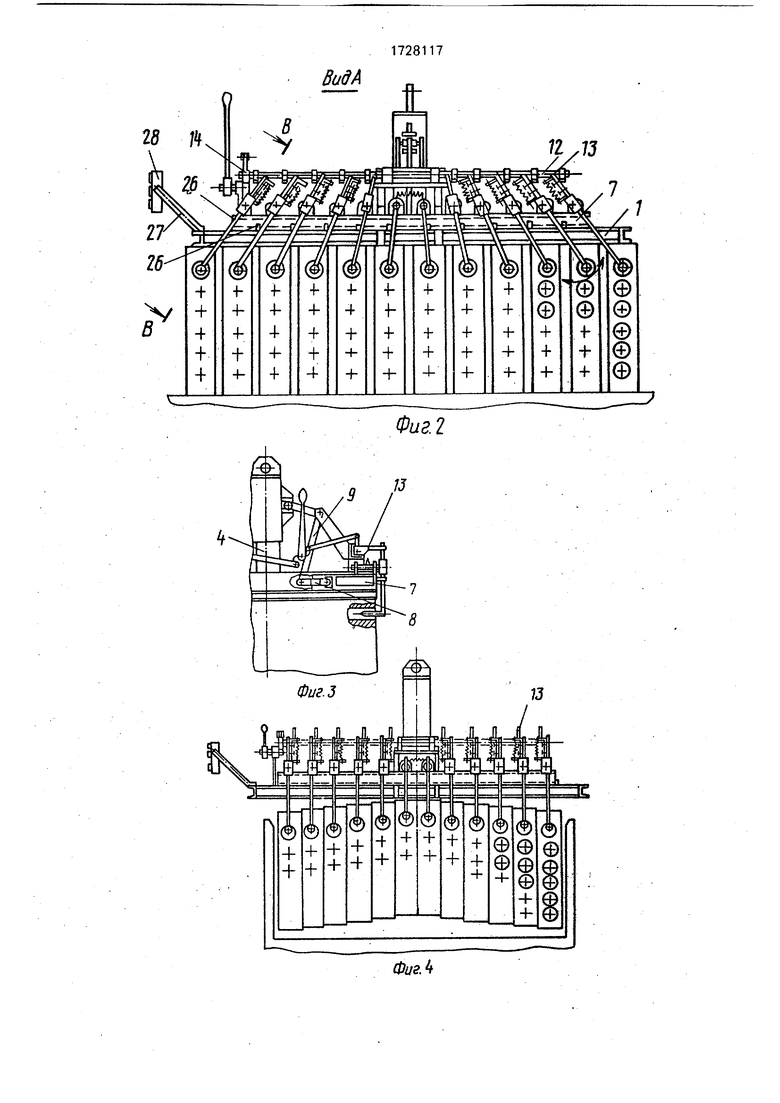
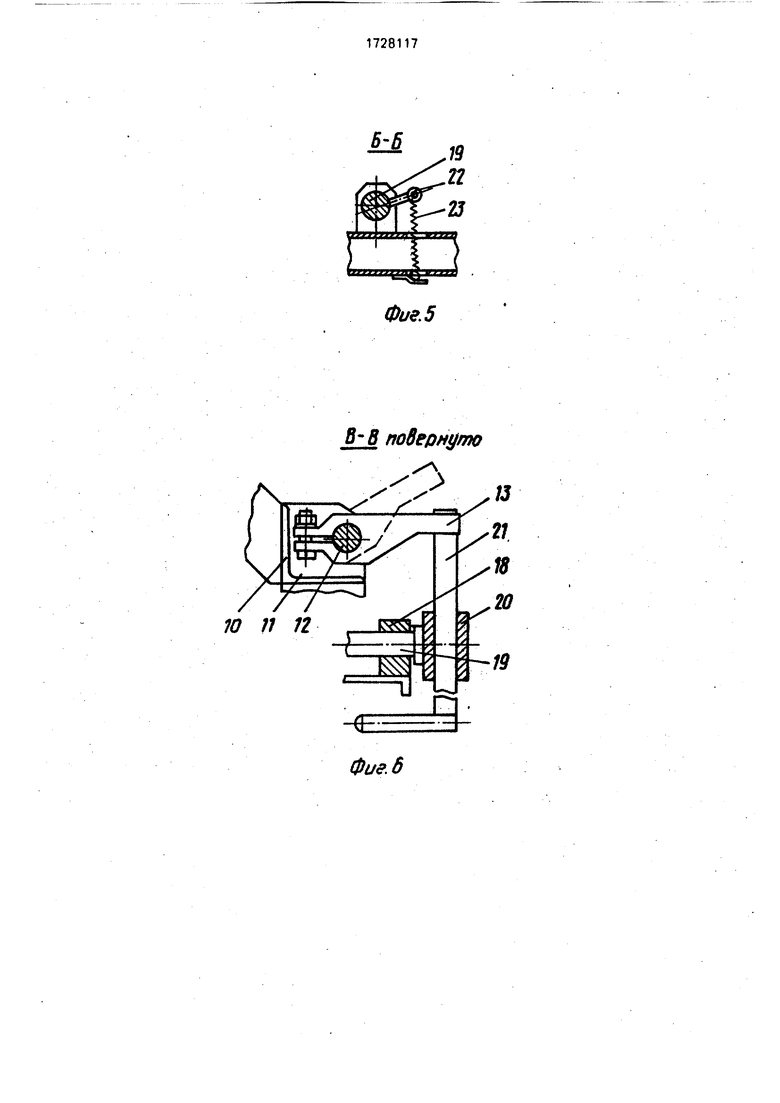
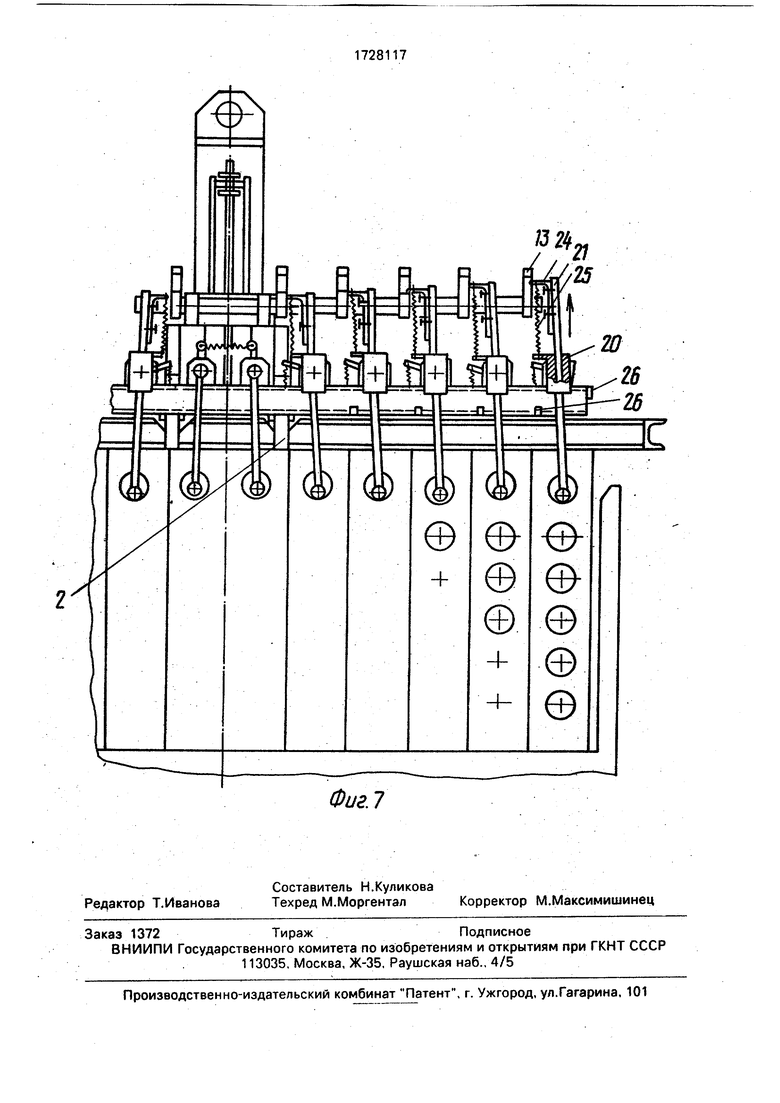
На фиг. 1 изображен захват в раскрытом положении, установленный на плиты, подлежащие подъему и сдвижке; на фиг.2 - вид по стрелке А на фиг.1; на фиг.З - то же, что и на фиг.1, но балки с прихватами сведены; на фиг.4 - захват с плитами поднят и расположен над упаковкой (контейнер), плиты сдвинуты в пакет; на фиг. 5 - ось и пружина, сечение Б-Б на фиг.1; на фиг.6 - сечение В-В по прихвату на фиг.2; на фиг.7 - положение захвата и плит после укладки их в упаковку.
Захват состоит из рамы 1, которая содержит направляющие 2, стойки 3. стойку 4,
на которую надет ползун 5 с проушинами 6. Стойка с ползуном образует вертикально подвижную пару, внутри которой расположено автоматическое устройство фиксации захвата (на фиг. не показано) в открытом (см. фиг.1 и 2) и закрытом (см. фиг. 3,4,7) положениях. В пазах направляющих 2 размещены две параллельные балки, 7, тягами 8 шарнирно соединенные с нижними концами двуплечих рычагов 9, верхние плечи которых входят в кинематическую пару с проушинами 6 ползуна 5. Основания стоек 3 укреплены на балочках 10 (см. фиг.6), на которых в подшипниках 11 установлены параллельные валы 12, несущие фиксаторы 13. С одного конца валы 12 имеют рычаги 14, тягами 15, 16 кинематически связанные с приводом 17 поворота валов 12. На балках 7 в подшипниках 18 установлены оси 19. имеющие оголовки 20 с пазами, в которые подвижно вставлены прихваты 21. Оси 19 имеют ввернутые в них рычажки 22, пружинами 23 подсл
с
VI ю
00
VI
пружиненные к балкам 7. На прихватах 21 установлены ограничители 24. подпружиненные к оголовкам 20 пружинами 25. Для ограничения разворота прихватов 21 на балках 7 установлены ограничители 26. Положение ограничителей определяет угол поворота прихватов.
Для наведения захвата на грузы и управления грузоподъемным средством имеется рукоятка 27 с пультом 28.
Грузозахват работает следующим образом.
В раскрытом положении (см. фиг.1 и 2), которое фиксируется автоматически, захват устанавливают на плиты и начинают подъем. Вначале подъема ползун 5 пойдет вверх и проушинами б повернет двуплечие рычаги 9, вследствие чего балки 7 будут сдвинуты навстречу одна другой, расположенные на них прихваты 21 нижними концами войдут в пустоты плит, а верхними (см. фиг.З, 6) - в зону зацепления с фиксаторами 13, после чего свободный ход ползуна (относительно стойки 4, а следовательно, и всей рамы) прекратится и дальнейший подъем будет осуществляться вместе с плитами. При этом верхние концы прихватов упрутся в фиксаторы 13 и плиты будут подняты в том же состоянии, в каком были на вагонетке, т.е. с зазорами. Для сдвигания плит поворачивают рычаг привода 17, вследствие чего валы 12 повернутся, а с ними и фиксаторы 13 повернутся вверх, вследствие чего верхние концы прихватов будут освобождены и плиты, поворачивая прихваты 13 на осях 19 под действием собственного веса устремятся к середине захвата и сблизятся (см фиг.4), заняв по высоте различные относительно горизонтальной плоскости положения. В таком положении плиты опускают в упаковку (см. фиг.7). При этом плиты, наиболее удаленные от середины захвата, а потому и более провисшие, достигнут дна упаковки (контейнера, площадки) первыми и расположенные в них прихваты начнут пе- ремещаться в пазах оголовков вверх, не препятствуя тем самым дальнейшему опусканию плит с захватом.
Формула изобретения 10 Захват для пакетированных грузов с отверстиями, содержащий несущую раму, размещенный в ее центре и связываемый с крюком грузоподъемной машины механизм фиксации прихватов, расположенных на 15 концах рамы, и кинематическую связь прихватов с подвижным элементом механизма фиксации, включающую в себя валы, расположенные поперек несущей рамы на ее концах, и пружины, отличающийся тем 20 что, с целью расширения эксплуатационных возможностей путем обеспечения сдвижки грузов друг к другу, кинематическая связь прихватов с подвижным элементом механизма фиксации дополнительно включает в 25 себя выполненные в раме по ее концам продольные направляющие, установленные в последних балки, размещенные в балках с возможностью поворота вокруг поперечных им осей оси, к которым присоединены пру- 0 жины и на которых закреплены прихваты шарнирно связанные с подвижным элементом механизма фиксации й посредством тяг с балками угловые рычаги, шарнирно присоединенные к угловым рычагам стойки, жес- 5 тко прикрепленные к стойкам П-образные балки с отверстиями в вертикальных элементах, в которых: расположены с возможностью поворота упомянутые валы выполненные с кронштейнами, размещен- 0 ными с возможностью взаимодействия с прихватами.
Фиа2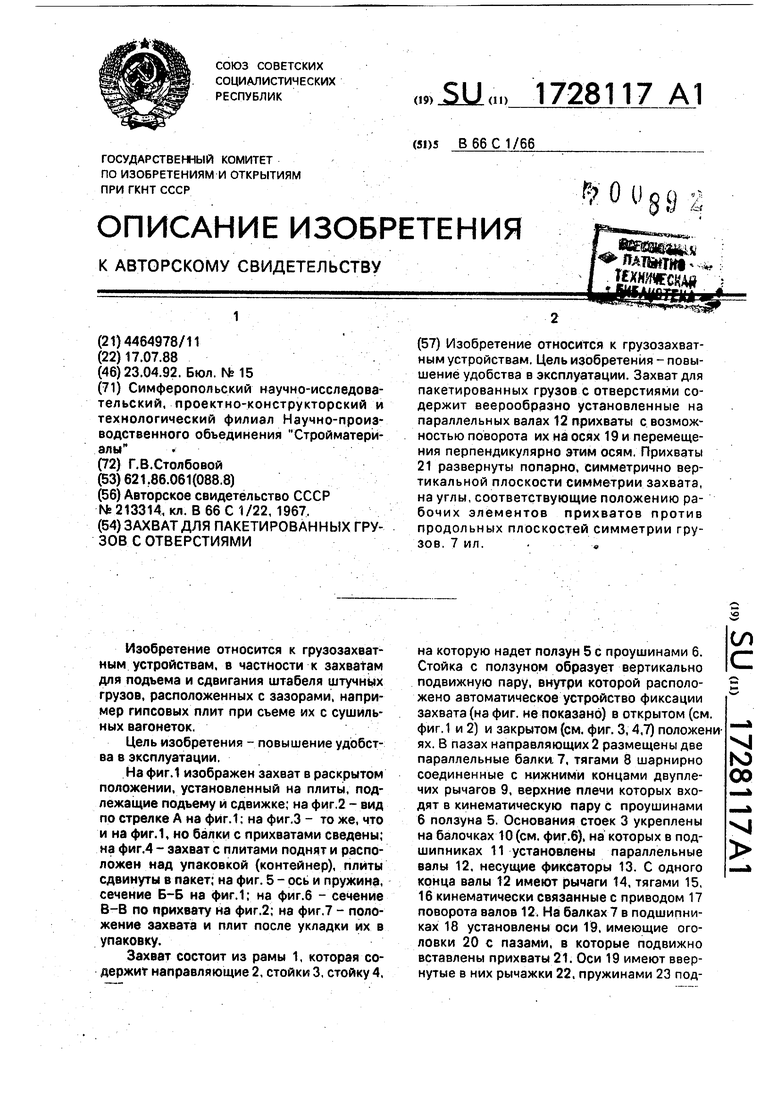
| название | год | авторы | номер документа |
|---|---|---|---|
| МОСТОВАЯ КОНСТРУКЦИЯ И МОСТОСБОРОЧНАЯ МАШИНА ДЛЯ ТРАНСПОРТИРОВКИ, СБОРКИ И УКЛАДКИ НА ПРЕГРАДУ МОСТОВОЙ КОНСТРУКЦИИ | 2001 |
|
RU2210656C2 |
| РАМА ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 2006 |
|
RU2327328C1 |
| ТРАНСПОРТНО-УСТАНОВОЧНЫЙ АГРЕГАТ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2011 |
|
RU2478539C2 |
| АГРЕГАТ ДЛЯ УДАЛЕНИЯ ИЗ ГРУНТА АНКЕРОВ И ФУНДАМЕНТОВ ОПОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2001 |
|
RU2280734C2 |
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| Автоматизированная линия для сварки балок коробчатого сечения | 1988 |
|
SU1618559A1 |
| МОСТОУКЛАДЧИК | 1996 |
|
RU2102556C1 |
| АВТОПОЕЗД | 1997 |
|
RU2131369C1 |
| ПЕРЕДВИЖНОЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 2002 |
|
RU2238236C2 |
| Транспортное средство для перевозки грузов | 1988 |
|
SU1579806A2 |
Изобретение относится к грузозахватным устройствам. Цель изобретения - повышение удобства в эксплуатации. Захват для пакетированных грузов с отверстиями содержит веерообразно установленные на параллельных валах 12 прихваты с возможностью поворота их на осях 19 и перемещения перпендикулярно этим осям. Прихваты 21 развернуты попарно, симметрично вертикальной плоскости симметрии захвата, на углы, соответствующие положению рабочих элементов прихватов против продольных плоскостей симметрии грузов. 7 ил.«
Фиг А
В-В повернуто
Фие.6
Фиг. 5
| АВТОМАТИЧЕСКИЙ ТОРЦОВЫЙ ЗАХВАТ ДЛЯ ТРУБ | 0 |
|
SU213314A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
