Лвтоматичеокие торцовые захваты для труб, содержащие траверсу, поворотные подпружиненные крюки, гибкие тяги для поворота крюков и механизм фиксации, обаспечивающий фимспроваиные пололсения :крЮ:Ков в рабочем и нерабочем состояниях, известны.
Цель изобретения - обеспечить возможность переналадки захватов для подъема труб различного диаметра.
Это достигается тем, что в предложенном захвате крюйи вынолнены нодвижными вдоль поворотных труб, р.дзмещениых на концах траверсы и имеющих направляющие прорези для штырей, установлепных в обоймах крюков, надетых на поворотные трубы.
Для одновременной переналадки всех крюков, расположенных на каждой из поворотных труб, внутри последних могут быть установлены винты с резьбой различного щага на участках расположения крюков, взаимодействующей с резьбой гаек, прикрепленных к штырям крюков.
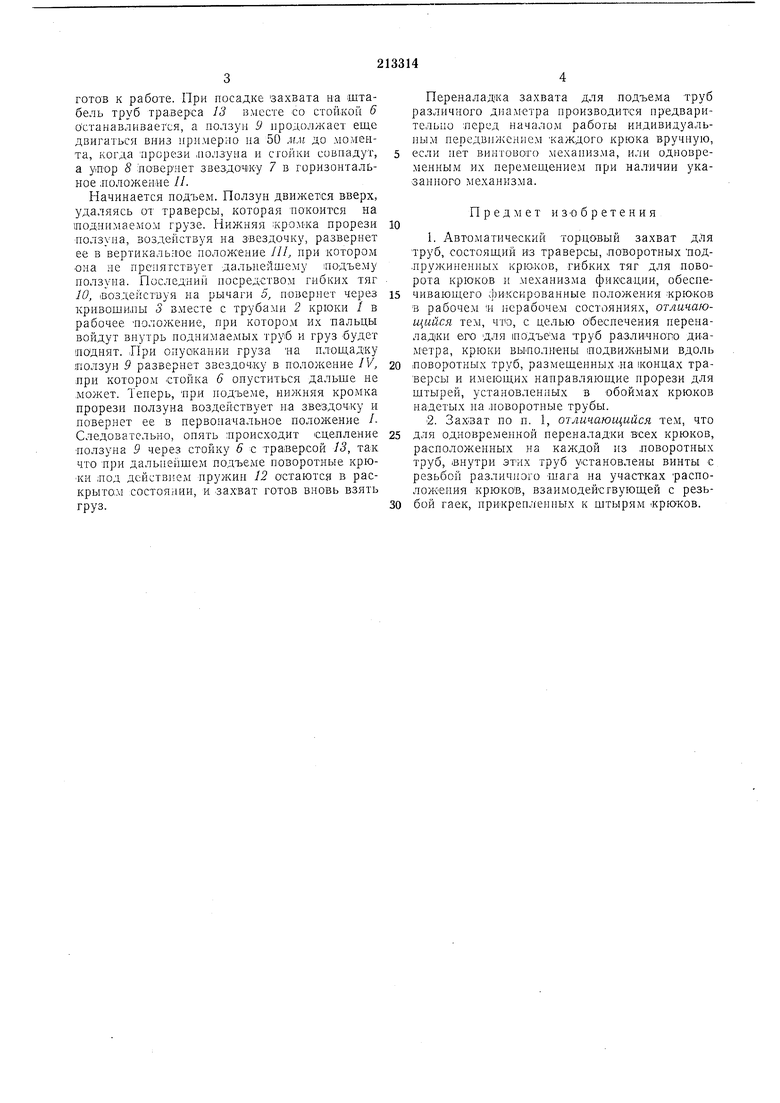
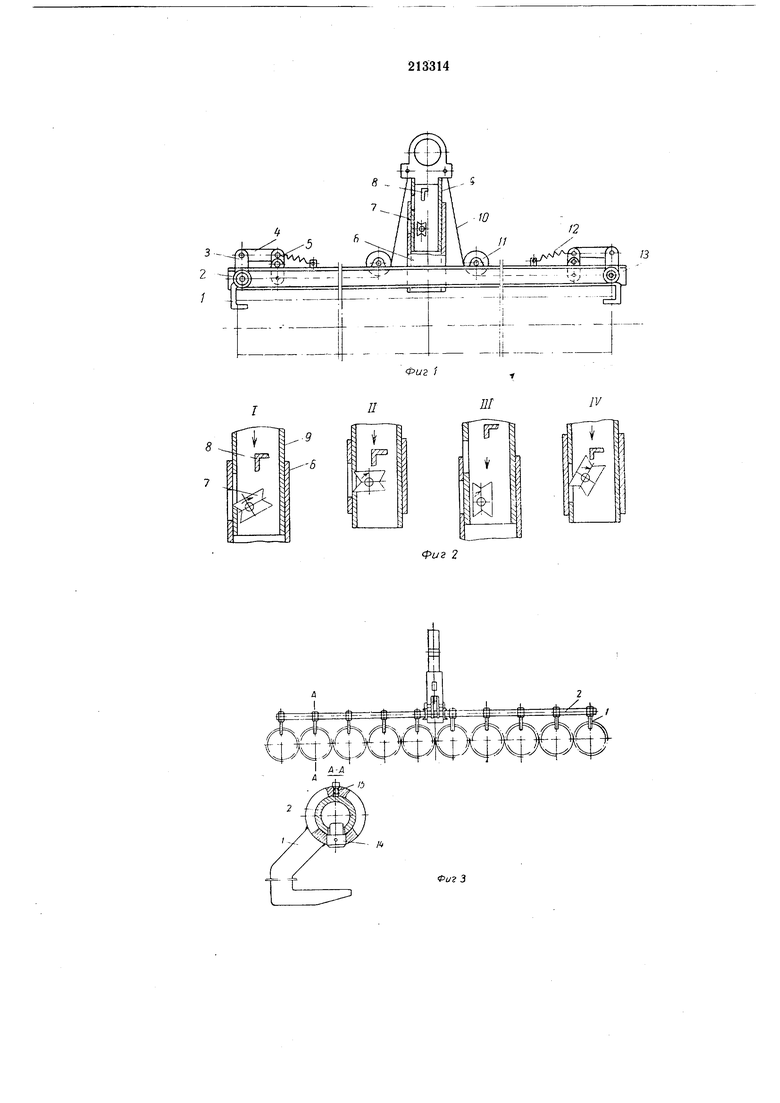
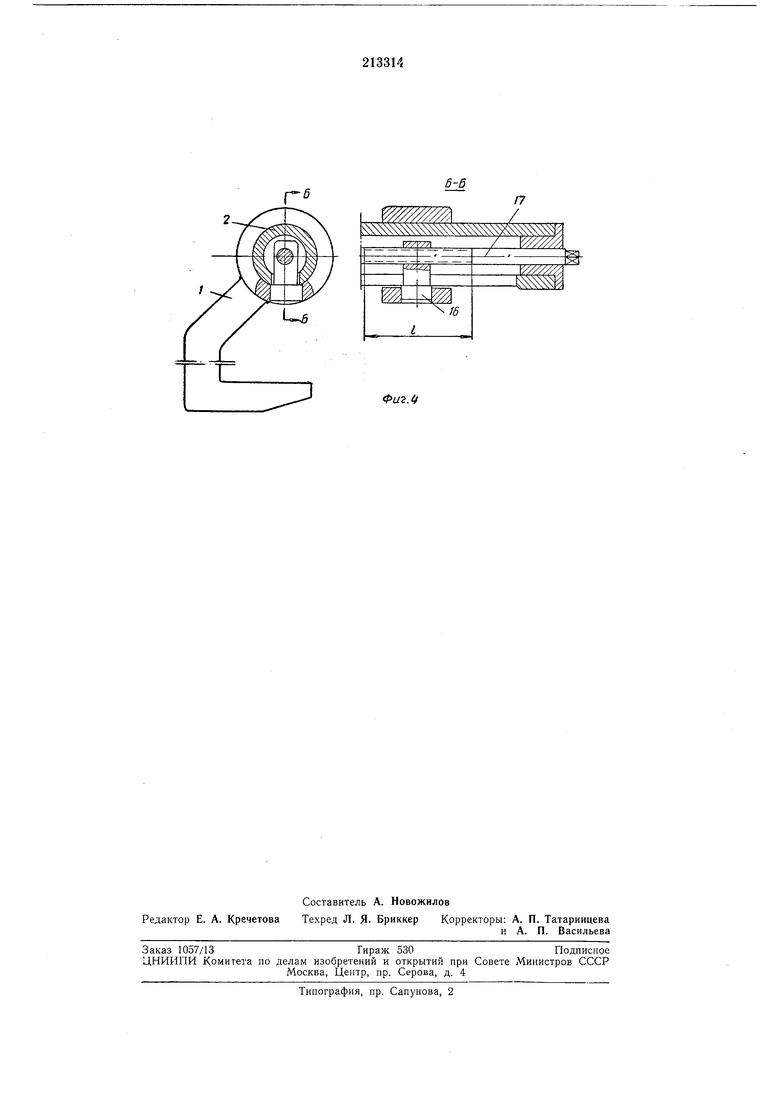
На фиг. 1 изображен онисываемый захват, вид сборку; на фиг. 2 - различные пололсения механизма фиксации; на фиг. 3 показаны поворотные трубы с крюками, прикрепленные к траверсе захвата; яа фиг. 4 - узел присоединения крЮ:Ка с его обоймой к гайке винта переналадки.
Захват содержит крюки 1, поворотные трубы 2, нмеющие снизу прорезь и жестко связанные с кривошилами 3, тяги 4, шарнирно соединенные с крнвошннами 3 и рычагами 5,
стойку 6, звездочку 7, механизм фиксации, упор S, нол1зун 9 с проушиной для подвеоки захвата на крана, гибкие тяги 10, блоки /Л возвратные пружины 12 н траверсу 13. Внутри обойм Крючков 1 монтированы направляющ не щтыри 14, входящие в прорезь труб 2 и фиксирующие винты 15.
Внутри труб 2 может быть установлен винт 17 (см. фиг. 4), имеющий на участках / резьбу (правую илн левую) различного шага. Величина шага зависит от .количества крюков /, размещенных справа и слева относительно траверсы 13. Гайки 16, взаихмодействующие с винтом 17, установлены в обоймах крюков / и имеют резьбу, соответствующую резьбе винта 17 на данном отрезке /. На чертеже показано взаимодействие частей при рабочем положении Крюков и подъеме груза (труб).
Работа захвата характеризуется четырьмя иоследов ательными положениями звездочки 7.
В положении / звездочка своим зубом заклинивает ползун 9 относительно стойки 6. В этот момент новоротные крюки / иод действием пружин 12 находятся в нерабочем положении и разведены в сгороны. В таком виде
готов к работе. При посадке захвата на штабель труб тра.верса 13 вместе со стойкой 6 Останавливается, а ползун 9 продолжает еще двигаться вниз ири.мерно на 50 мм до момента, когда прорези .нолзуна и стойки совпадут, а улОр 8 повернет звездочасу 7 в горизонтальное .положение //.
Начинается подъем. Ползун движется вверх, удаляясь от траверсы, которая нокоится на тоднпмаемом грузе. Нижняя кролжа прорези Ползуна, воздействуя на звездочку, развернет ее в вертикаль.юе положение ///, при котором она не препятствует даль}1ейшему яодъему ползуна. Последний посредством гибких тяг 10, 1воздействуя на рычаги 5, повернет через кри,воши,пы 5 вместе с трубами 2 крюки / в рабочее положение, при котором их пальцы войдут внутрь поднимаемых труб и груз -будет поднят. При опускании груза на ндощадку ;ползун 9 развернет звездочку в положение IV, при котором стойка 6 опуститься дальше не может. Теперь, при подъеме, нижняя кромка прорези ползуна воздействует на звездочку и повернет ее в первоначальное положение /Следовательно, опять яроисходит сцепление ползуна 9 через стойку 6 с траверсой 13, так что при дальнейшем подъеме поворотные крюКи :под действием пружин 12 остаются в раскрыто;м состоянии, и захват готов вновь взять груз.
Переналадка захвата для подъема труб различного диаметра нроизводится предварительпо перед началом работы индивидуальным нередвижением каждого крюка вручную, если нет винтового механизма, или одновременным их перемещением при наличии указанного механизма.
Предмет изобретения
1.Автоматический торцовый захват для труб, состоящий из траверсы, поворотных подлружинениых , гибких тяг для поворота крюков и механизма фиксации, обеспечивающего фи ксированные положения крюков в рабочем w нерабочем состояниях, отличающийся тем, что, с целью Обеспечения переналадки его для иодъема труб разлцчно ло диаметра, крюки выполнены иодвижиыми вдоль поворотных труб, размещенных .на концах траверсы и имеющих направляюптие нрорези для щтырей, установленных в обоймах крюков надетых на .поворотные трубы.
2.Захват по п. 1, отличающийся тем, что для одновременной переналадки всех крюков, расположенных на каждой из .поворотных труб, «внутри этих труб установлены винты с резьбой различ1{ого шага на участках расположения крюков, взаимодействующей с резьбой гаек, прикреплеппых к штырям крючков.
2 /
/3
9 -В
Т г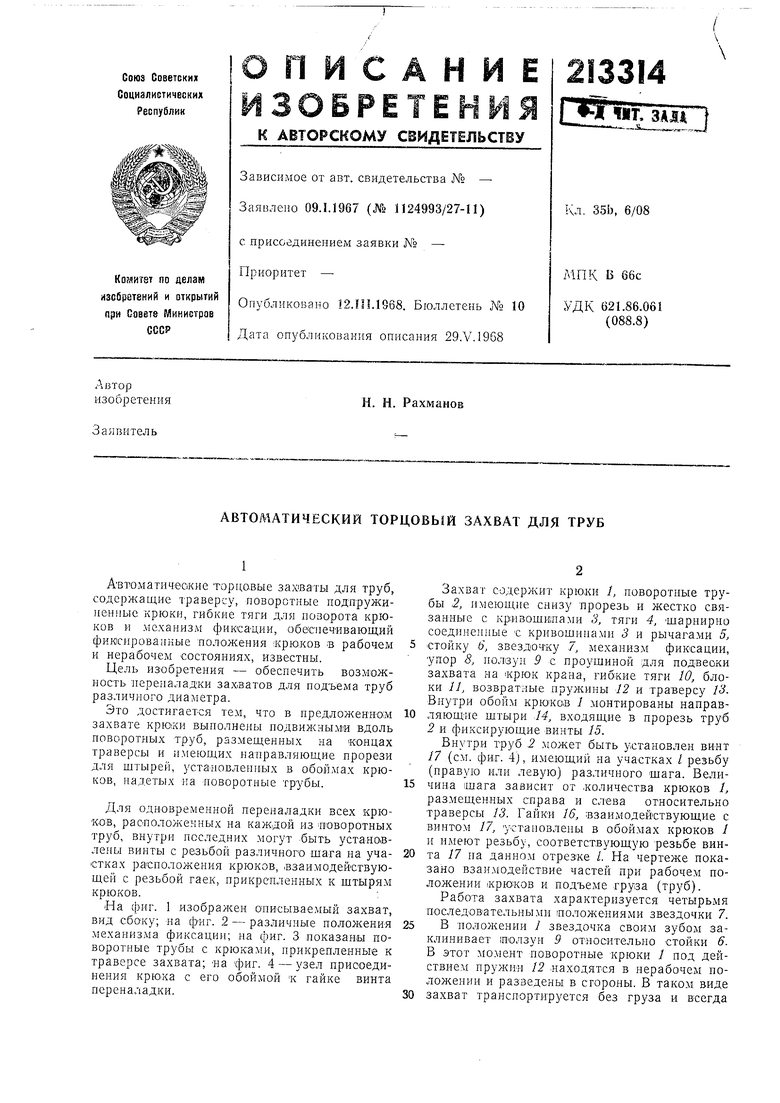
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| Захват для пакетов изделий | 1958 |
|
SU118963A1 |
| УСТРОЙСТВО для ЗАХВАТА И ТРАНСПОРТИРОВКИ ТРУБ | 1969 |
|
SU237364A1 |
| УРАВНОВЕШЕННЫЙ КРАНОВЫЙ ВИЛОЧНЫЙЗАХВАТ | 1971 |
|
SU420535A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ ТРУБ БОЛЬШОГО ДИАМЕТРА | 2003 |
|
RU2245292C2 |
| КРАНОВЫЙ ВИЛОЧНЫЙ ЗАХВАТ | 1966 |
|
SU181797A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С АВТОМАТИЧЕСКИМ | 1973 |
|
SU381597A1 |
| Устройство для установки анкерной крепи | 1990 |
|
SU1789722A1 |
Ри 3
В-Б
///////М
,
Y///////.
16
Фич.и
