Изобретение относится к автомобильному транспорту для перевозки пакетированных грузов, например кирпичей на поддонах, при этом погрузка и выгрузка осуществляется при помощи грузоподъемного борта, и является усовершенствованием изобретения по авт. св. № 1331686.
Целью изобретения является повышение эффективности и надежности работы.
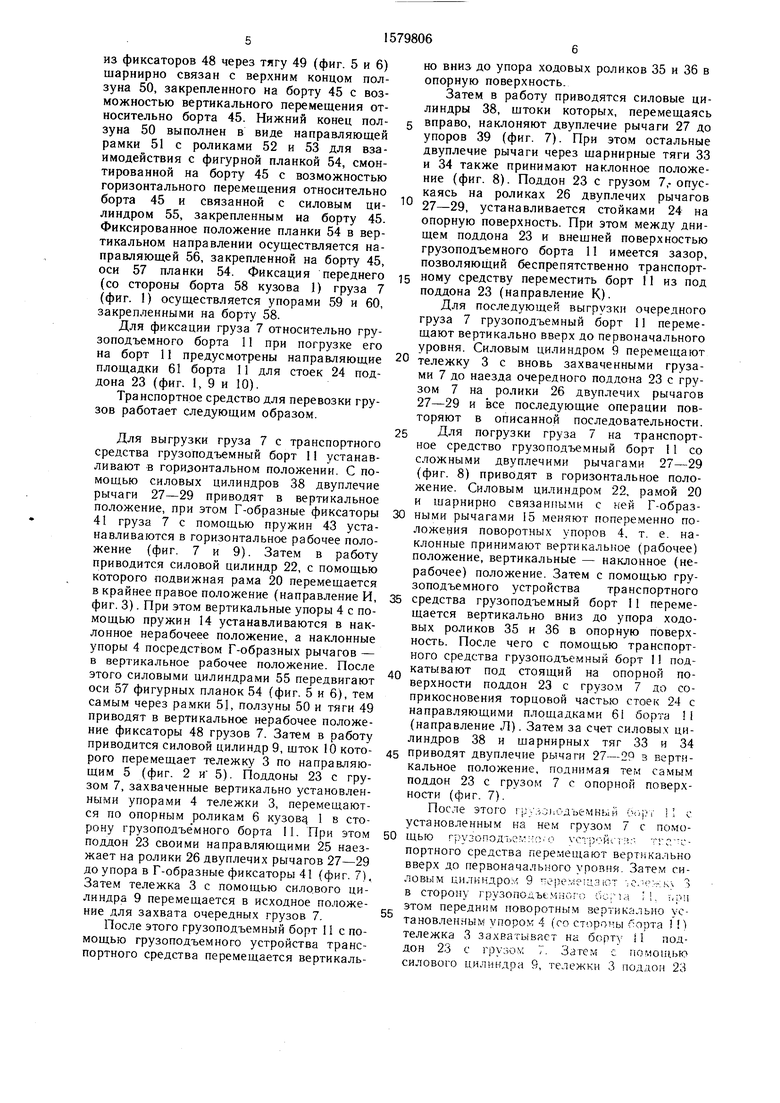
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; па фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - вид В на фиг 3; на фкг. 5 - разрез Г - Г на фиг. ; на фиг. 6 - разрез Д-Д на фиг. 5; на фкг. 7 - разрез Е-Е на фиг. 1; на фиг. 8 - то же, рабочее положение; на фиг. 9 - разрез Ж-Ж на фиг. 7; на фиг. 10 - вид 3 на фиг. 9.
Транспортное средстзо лля перевозки грузов содержит кузов 1 (фиг. 1 и 51, на котором смонтированы приводной толкатель 2, выполненный в виде тележки 3 с подпружиненными поворотными упорами 4 и направляющих 5 тележки 3, опорные ролики 5 груза 7, рольганг 8 груза 7, продольный силовой цилиндр 9. шток 10 которого жестко связан с тележкой 3, грузоподъемный борт 11.
Тележка 3 (фиг. 2 и 5) имеет ходовые ролики 12 для перемещения по направляющим 5. Подпружиненные поворотные упоры 4 установлены в тележке 3 на оси 13 и удерживаются от произвольного опрокидывания пружинами 14. В зависимости от режима работы транспортного средства (погрузка или выгрузка груза) одни из упоров 4 установлены в наклонном положении с помощью пружин 14, другие - в вертикальном положении с помощью Г-образных рычагов 15, каждый из которых шарнирно закреплен своей средней частью в тележке 3 с помощью оси 16 и проушин 17, закрепленных в тележке 3 (фиг. 3) Одно плечо рычага 15 снабжено упорным роликом 18 для взаимодействия с поворотным упором 4, а другое через тягу 19 шарнирио связано с под0
0
5
0
5
0
5
вижной рамой 20, установленной вдоль внутренней полости тележки 3 на опорных роликах 21, закрепленных в тележке 3, и связанной с силовым цилиндром 22, соединенным с тележкой 3 (фиг. 4).
Груз 7 представляет собой пакет (например, пакет кирпичей), размещенный на поддоне 23 со стойками 24, установленными на опорных роликах 6 кузова 1 (фиг. 5). На днище поддона 23 между стойками 24 смонтированы напоавляющие 25 для роликов 26 двуплечих рычагов 27-29, установленных на осях 30-32 в грузоподъемном борту 11 (фиг. 7 к 8) и шарнирно связанных между гобой шарнирными тягами 33 и 34. Нижние плечи рычагов 27 и 29 снабжены роликами 35 и 36 для взаимодействия с опорной поверхностью (фиг. 7-9). При этом нижнге плечо каждого из рычагов 27 шарнирно соединено со штоком 37 силового цилиндра 38, шарнирно закрепленного на грузоподъемном борту 11 Для удержания двуплечих рычагов 27-29 в наклонном положении грузоподъемный борт 11 снабжен упорами 39 и 40. С целью предотвращения скатывания груза 7 с направляющих роликов 26 двуплечих рычагов 27-29 при вертикальном перемещении грузоподъемного борта 1i нз верхнем плече каждого из двуплечих рычагов 27 шар- чирно установлены Г-образные фиксаторы 41 (фиг. 7 - iO). В вертикальном положении дьуплечих рычагов 27 Г-образные фиксаторы 41 поперечиной 42 прижаты к стойкам двуплечих рычагов 27 пружиной 43, один конец которой закреплен на рычаге 27, а другой - на поперечине 42.
Грузоподъемный борт 11 смонтирован на раме 44 грузоподъемного устройства транспортного средства с возможностью поворота в вертикальной плоскости.
Для исключения перемещения груза 7 в кузове 1 во время движения транспортного средства на боковых бортах 45 кузова 1 с помощью осей 46, проушин 47, закрепленных на боотах 45, поворотно смонтированы фиксаторы 48 груза 7. Каждый
из фиксаторов 48 через тягу 49 (фиг. 5 и 6) шарнирно связан с верхним концом ползуна 50, закрепленного на борту 45 с возможностью вертикального перемещения относительно борта 45. Нижний конец ползуна 50 выполнен в виде направляющей рамки 51 с роликами 52 и 53 для взаимодействия с фигурной планкой 54, смонтированной на борту 45 с возможностью горизонтального перемещения относительно борта 45 и связанной с силовым цилиндром 55, закрепленным на борту 45. Фиксированное положение планки 54 в вертикальном направлении осуществляется направляющей 56, закрепленной на борту 45,
но вниз до упора ходовых роликов 35 и 36 в опорную поверхность.
Затем в работу приводятся силовые цилиндры 38, штоки которых, перемещаясь 5 вправо, наклоняют двуплечие рычаги 27 до упоров 39 (фиг 7). При этом остальные двуплечие рычаги через шарнирные тяги 33 и 34 также принимают наклонное положение (фиг. 8). Поддон 23 с грузом 7,-опускаясь на роликах 26 двуплечих рычагов 27-29, устанавливается стойками 24 на опорную поверхность При этом между днищем поддона 23 и внешней поверхностью грузоподъемного борта 11 имеется зазор, позволяющий беспрепятственно транспорт10
оси 57 планки 54. Фиксация переднего 15 ному средству переместить борт 11 из под (со стороны борта 58 кузова 1) груза 7поддона 23 (направление К),
(фиг. 1) осуществляется упорами 59 и 60,Для последующей выгрузки очередного
закрепленными на борту 58.груза 7 грузоподъемный борт 11 перемеДля фиксации груза 7 относительно гру-щают вертикально вверх до первоначального
зоподъемного борта 11 при погрузке егоуровня Силовым цилиндром 9 перемещают
на борт 11 предусмотрены направляющие 20 тележку 3 с вновь захваченными грузами 7 до наезда очередного поддона 23 с грузом 7 на ролики 26 двуплечих рычагов 27-29 и все последующие операции повторяют в описанной последовательности. Для погрузки груза 7 на транспортплощадки 61 борта 11 для стоек 24 поддона 23 (фиг. 1, 9 и 10).
Транспортное средство для перевозки грузов работает следующим образом
Для выгрузки груза 7 с транспортного средства грузоподъемный борт I1 устанавливают в горизонтальном положении С помощью силовых цилиндров 38 двуплечие рычаги 27-29 приводят в вертикальное
25
ное средство грузоподъемный борт 11 со сложными двуплечими рычагами 27-29 (фиг. 8) приводят в горизонтальное положение Силовым цилиндром 22, рамой 20 и шарнирно связанными с кей Г-образположение, при этом Г-образные фиксаторы 30 ными рычагами 15 меняют попеременно по41 груза 7 с помощью пружин 43 устанавливаются в горизонтальное рабочее положение (фиг 7 и 9). Затем в работу приводится силовой цилиндр 22, с помощью которого подвижная рама 20 перемещается
ложения поворотных поров 4. т е наклонные принимают вертикальное (рабочее) положение, вертикальные - наклонное (нерабочее) положение Затем с помощью грузоподъемного устройства транспортного
в крайнее правое положение (направление И, 35 средства грузоподъемный борт 11 переме- фиг 3). При этом вертикальные упоры 4 с по-щается вертикально вниз до упора ходомощью пружин 14 устанавливаются в нак-вых роликов 35 и 36 в опорную поверхлонное нерабочеее положение, а наклонные упоры 4 посредством Г-образных рычагов - в вертикальное рабочее положение. После этого силовыми цилиндрами 55 передвигают оси 57 фигурных планок 54 (фиг 5 и 6), тем самым через рамки 51, ползуны 50 и тяги 49
40
приводят в вертикальное нерабочее положение фиксаторы 48 грузов 7. Затем в работу
ность. После чего с помощью транспортного средства грузоподъемный борт 11 подкатывают под стоящий на опорной поверхности поддон 23 с грузом 7 до соприкосновения торцовой частью стоек 24 с направляющими площадками 61 борта 1 (направление Л). Затем за счет силовых цилиндров 38 и шарнирных тяг 33 и 34
приводится силовой цилиндр 9, шток 10 кото- 45 приводят двуплечие рычаги 27-2е з вертнрого перемещает тележку 3 по направляющим 5 (фиг. 2 и 5) Поддоны 23 с грузом 7, захваченные вертикально установленными упорами 4 тележки 3, перемещаются по опорным роликам 6 кузова. 1 в сторону грузоподъемного борта 11 При этом 50 щыо
кальное положение, поднимая тем самым поддон 23 с грузом 7 с опорной поверхности (фиг 7)
Пос1е этого , ,j j eMHbin | i с установленным на нем грузом 7 с помоподдон 23 своими направляющими 25 наезжает на ролики 26 двуплечих рычагов 27-29 до упора в Г-образные фиксаторы 41 (фиг 7). Затем тележка 3 с помощью силового цилиндра 9 перемещается в исходное положение для захвата очередных грузов 7
После этого грузоподъемный борт 11 с помощью грузоподъемного устройства транспортного средства перемещается вертикаль;опод7,о ,
портного средства перемещают вертикально вверх до первоначального уровня Затем силовым ЦИЛИНДрО 9 V|Vv JiLMi С- - ч 1 В СТОрОН J ру-ЗДПО Ы S,i, . .{ Ч
этом передним поворотным вертикально с тановленнып vnopov 4 (со стороны гошл П тележка 3 захватывает нй бгрт il поддон 23 с грч iov , Затем „ помощью силовою цилиндра Q, тележки Л под юн 23
но вниз до упора ходовых роликов 35 и 36 в опорную поверхность.
Затем в работу приводятся силовые цилиндры 38, штоки которых, перемещаясь 5 вправо, наклоняют двуплечие рычаги 27 до упоров 39 (фиг 7). При этом остальные двуплечие рычаги через шарнирные тяги 33 и 34 также принимают наклонное положение (фиг. 8). Поддон 23 с грузом 7,-опускаясь на роликах 26 двуплечих рычагов 27-29, устанавливается стойками 24 на опорную поверхность При этом между днищем поддона 23 и внешней поверхностью грузоподъемного борта 11 имеется зазор, позволяющий беспрепятственно транспорт0
5 ному средству переместить борт 11 из под поддона 23 (направление К),
тележку 3 с вновь захваченными грузами 7 до наезда очередного поддона 23 с грузом 7 на ролики 26 двуплечих рычагов 27-29 и все последующие операции повторяют в описанной последовательности. Для погрузки груза 7 на транспорт
ное средство грузоподъемный борт 11 со сложными двуплечими рычагами 27-29 (фиг. 8) приводят в горизонтальное положение Силовым цилиндром 22, рамой 20 и шарнирно связанными с кей Г-образными рычагами 15 меняют попеременно положения поворотных поров 4. т е наклонные принимают вертикальное (рабочее) положение, вертикальные - наклонное (нерабочее) положение Затем с помощью грузоподъемного устройства транспортного
средства грузоподъемный борт 11 переме- щается вертикально вниз до упора ходо
ность. После чего с помощью транспортного средства грузоподъемный борт 11 подкатывают под стоящий на опорной поверхности поддон 23 с грузом 7 до соприкосновения торцовой частью стоек 24 с направляющими площадками 61 борта 1 (направление Л). Затем за счет силовых цилиндров 38 и шарнирных тяг 33 и 34
приводят двуплечие рычаги 27-2е з вертн щыо
кальное положение, поднимая тем самым поддон 23 с грузом 7 с опорной поверхности (фиг 7)
Пос1е этого , ,j j eMHbin | i с установленным на нем грузом 7 с помо;опод7,о ,
портного средства перемещают вертикально вверх до первоначального уровня Затем силовым ЦИЛИНДрО 9 V|Vv JiLMi С- - ч 1 В СТОрОН J ру-ЗДПО Ы S,i, . .{ Ч
этом передним поворотным вертикально с тановленнып vnopov 4 (со стороны гошл П тележка 3 захватывает нй бгрт il поддон 23 с грч iov , Затем „ помощью силовою цилиндра Q, тележки Л под юн 23
с грузом 7 перемещается с борта 11 в кузов 1 транспортного средства.
Для повторения процесса погрузки все операции повторяют аналогично описанным, начиная с опускания грузоподъемного борта 11 на опорную поверхность.
Формула изобретения
1.Транспортное средство для перевозки грузов по авт. св. № 1331686, отличающееся тем, что, с целью повышения эффективности и надежности работы, оно снабжено установленными на боковых и грузоподъемных бортах фиксаторами груза, каждый фиксатор, установленный на грузоподъемном борту, выполнен в виде Г-об- разного рычага, одним концом шарнирно закрепленного с возможностью поворота в вертикальной продольной плоскости на верхнем плече двуплечего рычага, установленного в верхней части грузоподъемного борта, и взаимодействующего с грузом другим концом.
2.Транспортное средство по п. 1, отличающееся тем, что фиксаторы груза, ус0
тановленные на боковых бортах, выполнены в виде поворотных в продольной плоскости планок, каждая из которых тягой шарнирно соединена с верхним концом ползуна, закрепленного на борту с возможностью ограниченного вертикального перемещения относительно него, нижний конец ползуна выполнен в виде вертикальной направляющей рамки с роликами, охватывающими фигурную планку, смонтированную на борту с возможностью горизонтального перемещения при помощи закрепленного на борту силового цилиндра.
3. Транспортное средство по п. 1, отличающееся тем, что фиксатор каждого из
5 толкателей выполнен в виде Г-образного двуплечего рычага, закрепленного своей средней частью на тележке с возможностью юворота в продольной плоскости, при этом ча одном плече Г-образного рычага закреплен ролик для взаимодействия с толкателем, а другое через тягу шарнирно соединено с подвижной вдоль тележки рамой, установленной на закрепленных в тележке опорных роликах и соединенной с ней силовым цилиндром.
0

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для погрузки и разгрузки контейнеров и поддонов из транспортных средств | 1983 |
|
SU1161445A1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| Транспортное средство для перевозки грузов | 1985 |
|
SU1331686A1 |
| Кузов самосвального транспортного средства для перевозки легковесных грузов | 1982 |
|
SU1058811A1 |
| Транспортное средство для перевозки контейнеров | 1989 |
|
SU1622199A1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| Грузоподъемное устройство транспортного средства | 1983 |
|
SU1123909A1 |
| КОНТЕЙНЕРОВОЗ | 1973 |
|
SU404659A1 |
| Самосвальное транспортное средство | 1990 |
|
SU1787827A1 |



Изобретение относится к автомобильному транспорту для перевозки пакетированных грузов, например кирпичей на поддонах. Цель - повышение эффективности и надежности работы. Погрузка и выгрузка осуществляются при помощи грузоподъемного борта. Устройство снабжено фиксаторами груза, установленными на боковых бортах кузова и грузоподъемному борту, а фиксатор каждого из поворотных упоров выполнен в виде Г-образного рычага, закрепленного своей средней частью в тележке с возможностью поворота в вертикальной плоскости, параллельной направляющим кузова 1, при этом одно плечо Г-образного рычага снабжено роликом для взаимодействия с толкателем, а другое через тягу шарнирно соединено с подвижной вдоль тележки рамой, установленной на закрепленных в тележке опорных роликах и соединенной с ней силовым цилиндром. 2 з.п. ф-лы, 2 ил.
Фиг. 2
13
73 4
х. ЧУ
7
X-V
/ / /
7 5 78 15
Ik 23 4
7 б
т
5 72 3 3 27 Фиг. 5
б- Б
N Л
20 22
ФигЗ
- Г
7 25
ч
---л.f
I /s
иь
45 48
45
47 V
3-,
-@
т
3 27 г. 5
Л
39
У
А-Д
55
Фиг.5
Е - Е
цц
Фиг 7
Е-Е
Зазор
Л
Фиг 8
41 39
фиг 9
ВидЗ подернуто
П W 7 24
| Транспортное средство для перевозки грузов | 1985 |
|
SU1331686A1 |
