Изобретение относится к подъемно- транспортному машиностроению, в частности к ловителям для грузоподъемных механизмов.
Известна конструкция ловителя, содержащего неподвижно закрепленную по отношению к захватываемому элементу ось, на которой установлен эксцентриковый зажим одностороннего действия.
Недостатком такого ловителя является его односторонняя работоспособность - он выполняет свою функцию лишь при одном направлении перемещения каната.
Наиболее близким к предлагаемому является ловитель, содержащий огибаемый канатом блок, установленный на раме, двуплечие рычаги с тормозными элементами, установленными на общей оси их вращения и связанные надетой на эту ось пружиной кручения и фиксатор его положения, выполненный в виде роликов, взаимодействующих с канатом, которые установлены на концах двуплечих рычагов, противоположных тормозным элементам.
Недостатком известного ловителя является недостаточная надежность его в работе, не обеспечивающая двустороннее действие и надежное стопорение каната при его обрыве.
Цель изобретения - повышение надежности ловителя путем обеспечения его двустороннего действия,
V4 Ю Ю О 00 00
Поставленная цель достигается тем, что в ловителе для грузоподъемных механизмов, содержащем закрепленную на металлоконструкции ось, установленные на ней подпружиненные двуплечие рычаги, разме- щенные с возможностью взаимодействия одними концами, торцовые поверхности которых выполнены эксцентриковыми, с захватываемым элементом, и фиксатор его положения с роликами, свободный конец каждого из рычагов выполнен с прямолинейной площадкой, подпружиненной с наружной стороны, а фиксатор выполнен подвижным в горизонтальном направлении и установлен между прямолинейными пло- щадками с возможностью взаимодействия роликов с поверхностями площадок, обращенными одна к другой.
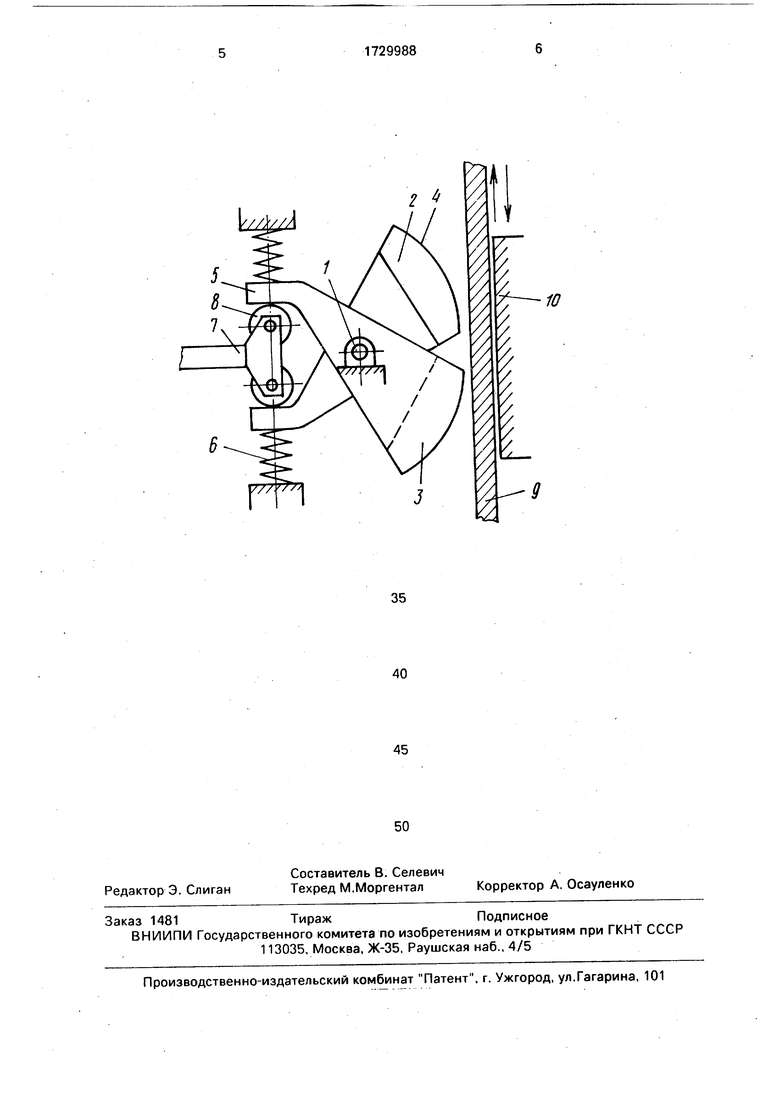
На чертеже схематически изображен ловитель, общий вид.
Ловитель содержит закрепленную на металлоконструкции ось 1, на которой установлены два подпружиненных двуплечих рычага 2 и 3, одни концы которых имеют торцовые опорные поверхности 4, выпол- ненные эксцентриковыми, а другие имеют прямые и параллельные между собой площадки 5, подпружиненные с наружной стороны пружинами 6. Между этими прямолинейными площадками установлен фиксатор 7, снабженный двумя роликами 8, которые взаимодействуют с внутренними поверхностями площадок 5, обращенными одна к другой. При этом фиксатор 7 удерживает в разведенном состоянии концы рычагов 2 и 3, имеющие прямолинейные площадки 5. Этот фиксатор 7 выполнен подвижным в горизонтальном направлении,а площадки 5 прижимаются пружинами 6 к его роликам 8. Между опорными поверхно- стями 4 рычагов-эксцентриков 2 и 3 и захватываемым канатом 9 имеется минимальный зазор, достаточный для свободного прохождения каната в обоих направлениях. За канатом 9 расположена опорная поверх- ность 10.
Ловитель работает следующим образом.
При нормальном режиме эксплуатации системы канат 9 свободно проходит в обоих направлениях между опорными торцовыми
поверхностями 4 рычагов эксцентриков 2 и 3 и опорной поверхностью 10. При необходимости защемления каната 9 фиксатор 7 перемещается влево до выведения роликов 8 из соприкосновения с прямолинейными площадками 5 рычагов эксцентриков. С этого момента последние под воздействием пружин 6 поворачиваются в направлении сближения прямолинейных площадок 5. При этом противоположные концы рычагов с торцовыми опорными поверхностями 4 также поворачиваются до соприкосновения этих поверхностей с канатом 9, после чего начинается самозатягивание одного из рычагов-эксцентриков до полного его заклинивания и защемления каната между опорной поверхностью 4 одного из рычагов 3 или 2 и опорной поверхностью 10. В зависимости от направления движения каната происходит самозатягивание одного, либо другого рычага-эксцентрика, чем обеспечивается двустороннее действие предлагаемого ловителя. Осуществляется самозатягивание того рычага-эксцентрика, с направлением самозатягивания которого совпадает направление движения каната 9. Например, при движении каната 9 вверх происходит самозатягивание рычага-эксцентрика 3, а при движении каната вниз - рычага-эксцентрика 2.
Формула изобретения Ловитель для грузоподъемных механизмов, содержащий закрепленную на металлоконструкции ось, установленные на ней подпружиненные двуплечие рычаги, размещенные с возможностью взаимодействия одними концами, торцовые поверхности которых выполнены эксцентриковыми, с захватываемым элементом, и фиксатор его положения с роликами, отличающийся тем, что, с целью повышения надежности путем обеспечения двустороннего действия, свободный конец каждого из рычагов выполнен с прямолинейной площадкой, подпружиненной с наружной стороны, а фиксатор выполнен подвижным в горизонтальном направлении и установлен между прямолинейными площадками с возможностью взаимодействия роликов с поверхностями площадок, обращенных одна к другой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСЦЕНТРИКОВЫЙ ЛОВИТЕЛЬ ДЛЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2329940C2 |
| Предохранительное устройство для удерживания грузозахватного органа с тросовым подвесом | 1990 |
|
SU1782924A1 |
| Крановый захват-кантователь | 1984 |
|
SU1240722A1 |
| Транспортный комплекс для проведения уклонов | 1989 |
|
SU1752875A1 |
| Захватное устройство для раскрывающейся тары | 1988 |
|
SU1654226A1 |
| Контейнер для сыпучих материалов | 1988 |
|
SU1604686A1 |
| Эксцентриковый ловитель для грузоподъемных механизмов | 1980 |
|
SU895877A1 |
| Воздушно-трелевочная установка | 1986 |
|
SU1344654A1 |
| ЛОВИТЕЛЬ | 2019 |
|
RU2718706C1 |
| ПРОТИВОУГОННЫЙ ЗАХВАТ ДЛЯ КРАНОВ | 2000 |
|
RU2225828C2 |
Использование: подъемно-транспортное машиностроение, ловители для грузоподъемных механизмов. Сущность изобретения: ловитель содержит закрепленную на металлоконструкции ось, на которой установлены два двуплечих рычага, одни концы которых имеют торцовые опорные поверхности, выполненные эксцентриковыми, а другие - параллельные между собой прямые площадки, подпружиненные с наружной стороны. Между площадками установлен фиксатор с двумя роликами, который удерживает концы рычагов в разведенном состоянии. Между опорными поверхностями и захватываемым канатом имеется минимальный зазор. При торможении фиксатор отводится в горизонтальном направлении влево, под действием пружин концы рычагов сближаются и один из них своей опорной поверхностью затормаживает канат и самозатягивается до полного .заклинивания каната относительно опорной поверхности. 1 ил. (Л С
| Тормозные устройства | |||
| Справочник | |||
| Под общ.ред | |||
| Александрова М.П | |||
| - М.: Машиностроение, 1985, с | |||
| Фотореле для аппарата, служащего для передачи на расстояние изображений | 1920 |
|
SU224A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Ловитель для грузоподъемных механизмов | 1988 |
|
SU1539154A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
